Efficient Computation of Whole-Body Control Utilizing Simplified Whole-Body Dynamics via Centroidal Dynamics

0
Sign in to get full access
Overview
- This paper presents a method for efficient computation of whole-body control using simplified whole-body dynamics via centroidal dynamics.
- The proposed approach aims to reduce the computational complexity of whole-body control, making it more practical for real-time applications.
- The key idea is to utilize a simplified whole-body model based on centroidal dynamics, which captures the essential dynamics of the robot without the need for a full-body model.
Plain English Explanation
The researchers have developed a new way to control the entire body of a robot more efficiently. Controlling a robot's entire body is complex and computationally intensive, as it requires modeling the dynamics of all the robot's joints and limbs.
The researchers' approach simplifies this process by focusing on the robot's center of mass and momentum, rather than modeling every individual part. This "centroidal dynamics" approach captures the essential movements of the robot's body without the need for a full, detailed model.
By using this simplified model, the researchers were able to reduce the computational complexity of the whole-body control algorithm. This makes it more practical for real-time applications, where the robot needs to respond quickly to its environment and the task at hand.
The key benefit of this work is that it allows robots to be controlled more efficiently, without sacrificing the ability to coordinate their entire bodies. This could lead to improvements in the agility, responsiveness, and overall capabilities of robotics systems.
Technical Explanation
The paper proposes a method for efficient computation of whole-body control by utilizing a simplified whole-body model based on centroidal dynamics. Centroidal dynamics focus on the robot's center of mass and its momentum, rather than modeling the full dynamics of each joint and limb.
The researchers develop a whole-body control formulation that leverages this simplified centroidal dynamics model. This allows them to reduce the computational complexity of the control problem, making it more practical for real-time applications compared to approaches that use a full-body dynamic model.
The paper presents the mathematical formulation of the whole-body control problem using the centroidal dynamics constraints. It then describes how to efficiently solve this optimization-based control problem, including techniques for handling contact constraints and other practical considerations.
The authors evaluate their approach through simulations and experiments on a humanoid robot. The results demonstrate that the proposed method can achieve comparable control performance to a full-body dynamic model, but with significantly lower computational costs.
Critical Analysis
The paper presents a thoughtful and well-designed approach to improving the efficiency of whole-body robot control. The use of centroidal dynamics to simplify the underlying model is a clever and well-justified technique.
One potential limitation is that the simplified model may not capture all the nuances of the robot's full-body dynamics, particularly for highly dynamic or complex motions. The authors acknowledge this and suggest that their approach may be most suitable for tasks that do not require the full flexibility of a complete dynamic model.
Additionally, the paper focuses on simulation and experiments with a humanoid robot. It would be interesting to see how the approach scales to other types of robots, such as wheeled platforms or legged systems, and how it performs in more complex, real-world environments.
Overall, this research represents a valuable contribution to the field of whole-body robot control, demonstrating a promising approach to balancing computational efficiency and control performance.
Conclusion
This paper presents an efficient method for whole-body robot control that leverages a simplified centroidal dynamics model. By focusing on the robot's center of mass and momentum, rather than a full dynamic model, the researchers were able to reduce the computational complexity of the control problem.
The proposed approach offers a practical solution for real-time applications, where responsiveness and computational efficiency are crucial. While the simplified model may not capture all the nuances of full-body dynamics, the results suggest that it can still achieve comparable control performance in many scenarios.
This work represents an important step forward in the field of whole-body robot control, potentially leading to more agile, responsive, and capable robotic systems in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Efficient Computation of Whole-Body Control Utilizing Simplified Whole-Body Dynamics via Centroidal Dynamics
Junewhee Ahn, Jaesug Jung, Yisoo Lee, Hokyun Lee, Sami Haddadin, Jaeheung Park
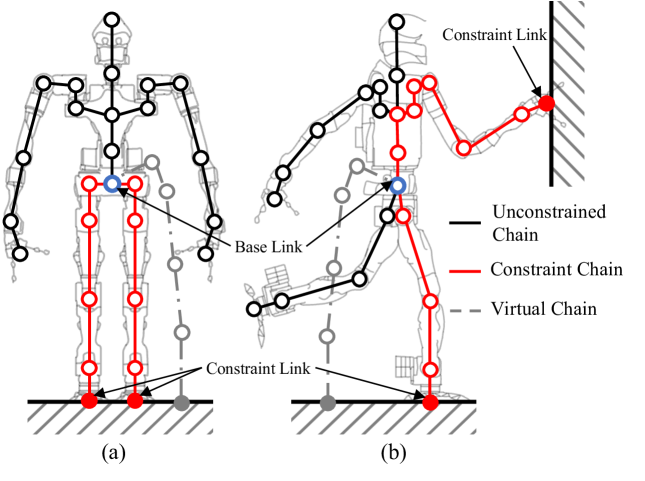
In this study, we present a novel method for enhancing the computational efficiency of whole-body control for humanoid robots, a challenge accentuated by their high degrees of freedom. The reduced-dimension rigid body dynamics of a floating base robot is constructed by segmenting its kinematic chain into constrained and unconstrained chains, simplifying the dynamics of the unconstrained chain through the centroidal dynamics. The proposed dynamics model is possible to be applied to whole-body control methods, allowing the problem to be divided into two parts for more efficient computation. The efficiency of the framework is demonstrated by comparative experiments in simulations. The calculation results demonstrate a significant reduction in processing time, highlighting an improvement over the times reported in current methodologies. Additionally, the results also shows the computational efficiency increases as the degrees of freedom of robot model increases.
Read more9/18/2024
0
Momentum-Aware Trajectory Optimisation using Full-Centroidal Dynamics and Implicit Inverse Kinematics
Aristotelis Papatheodorou, Wolfgang Merkt, Alexander L. Mitchell, Ioannis Havoutis
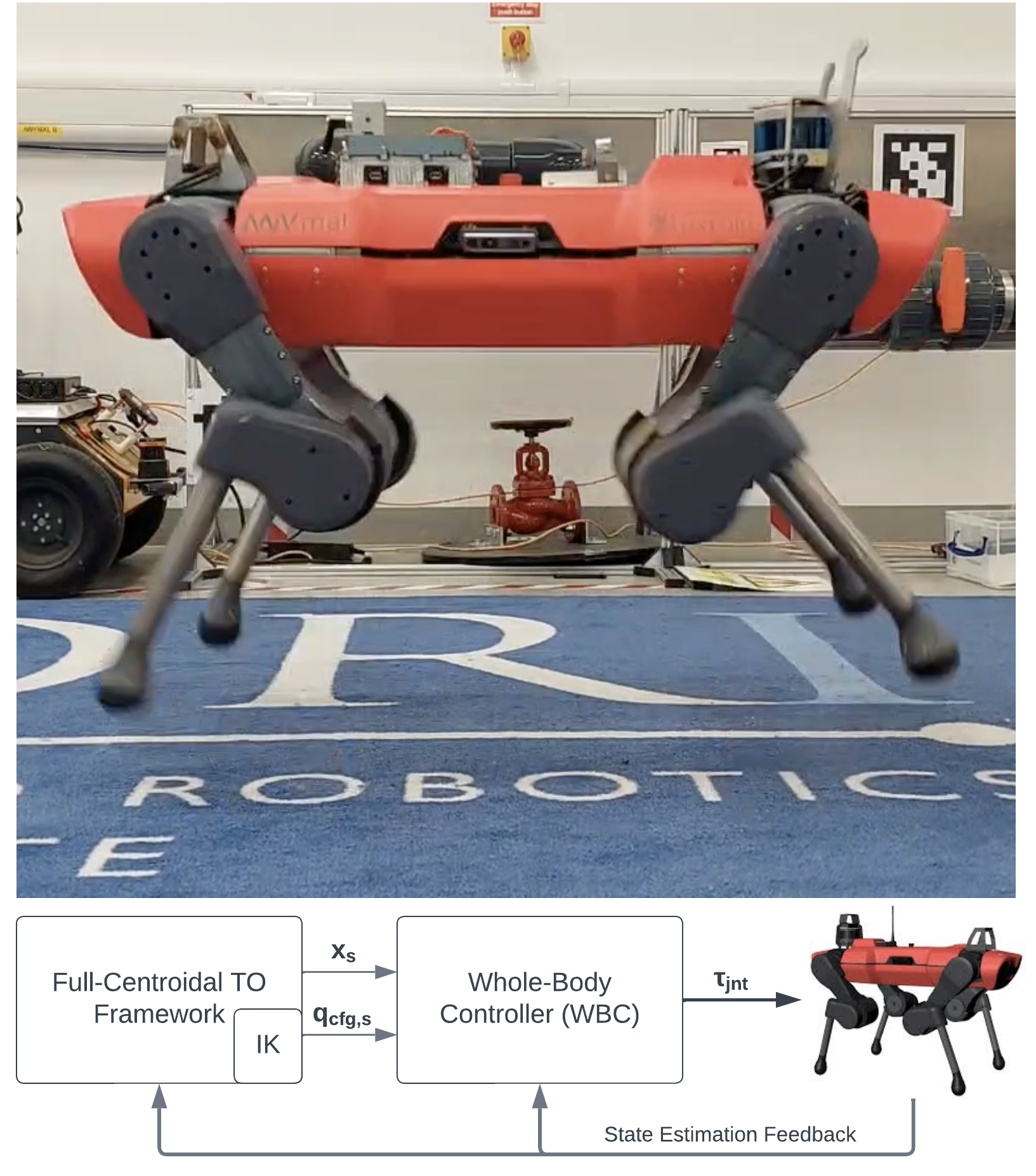
The current state-of-the-art gradient-based optimisation frameworks are able to produce impressive dynamic manoeuvres such as linear and rotational jumps. However, these methods, which optimise over the full rigid-body dynamics of the robot, often require precise foothold locations apriori, while real-time performance is not guaranteed without elaborate regularisation and tuning of the cost function. In contrast, we investigate the advantages of a task-space optimisation framework, with special focus on acrobatic motions. Our proposed formulation exploits the system's high-order nonlinearities, such as the nonholonomy of the angular momentum, in order to produce feasible, high-acceleration manoeuvres. By leveraging the full-centroidal dynamics of the quadruped ANYmal C and directly optimising its footholds and contact forces, the framework is capable of producing efficient motion plans with low computational overhead. Finally, we deploy our proposed framework on the ANYmal C platform, and demonstrate its true capabilities through real-world experiments, with the successful execution of high-acceleration motions, such as linear and rotational jumps. Extensive analysis of these shows that the robot's dynamics can be exploited to surpass its hardware limitations of having a high mass and low-torque limits.
Read more9/14/2024

0
Toward Control of Wheeled Humanoid Robots with Unknown Payloads: Equilibrium Point Estimation via Real-to-Sim Adaptation
Donghoon Baek, Youngwoo Sim, Amartya Purushottam, Saurabh Gupta, Joao Ramos
Model-based controllers using a linearized model around the system's equilibrium point is a common approach in the control of a wheeled humanoid due to their less computational load and ease of stability analysis. However, controlling a wheeled humanoid robot while it lifts an unknown object presents significant challenges, primarily due to the lack of knowledge in object dynamics. This paper presents a framework designed for predicting the new equilibrium point explicitly to control a wheeled-legged robot with unknown dynamics. We estimated the total mass and center of mass of the system from its response to initially unknown dynamics, then calculated the new equilibrium point accordingly. To avoid using additional sensors (e.g., force torque sensor) and reduce the effort of obtaining expensive real data, a data-driven approach is utilized with a novel real-to-sim adaptation. A more accurate nonlinear dynamics model, offering a closer representation of real-world physics, is injected into a rigid-body simulation for real-to-sim adaptation. The nonlinear dynamics model parameters were optimized using Particle Swarm Optimization. The efficacy of this framework was validated on a physical wheeled inverted pendulum, a simplified model of a wheeled-legged robot. The experimental results indicate that employing a more precise analytical model with optimized parameters significantly reduces the gap between simulation and reality, thus improving the efficiency of a model-based controller in controlling a wheeled robot with unknown dynamics
Read more8/22/2024

0
Variable Inertia Model Predictive Control for Fast Bipedal Maneuvers
Seung Hyeon Bang, Jaemin Lee, Carlos Gonzalez, Luis Sentis
This paper proposes a novel control framework for agile and robust bipedal locomotion, addressing model discrepancies between full-body and reduced-order models. Specifically, assumptions such as constant centroidal inertia have introduced significant challenges and limitations in locomotion tasks. To enhance the agility and versatility of full-body humanoid robots, we formalize a Model Predictive Control (MPC) problem that accounts for the variable centroidal inertia of humanoid robots within a convex optimization framework, ensuring computational efficiency for real-time operations. In the proposed formulation, we incorporate a centroidal inertia network designed to predict the variable centroidal inertia over the MPC horizon, taking into account the swing foot trajectories -- an aspect often overlooked in ROM-based MPC frameworks. By integrating the MPC-based contact wrench planning with our low-level whole-body controller, we significantly improve the locomotion performance, achieving stable walking at higher velocities that are not attainable with the baseline method. The effectiveness of our proposed framework is validated through high-fidelity simulations using our full-body bipedal humanoid robot DRACO 3, demonstrating dynamic behaviors.
Read more9/17/2024