LLM-based Robot Task Planning with Exceptional Handling for General Purpose Service Robots
2405.15646
0
0

Abstract
The development of a general purpose service robot for daily life necessitates the robot's ability to deploy a myriad of fundamental behaviors judiciously. Recent advancements in training Large Language Models (LLMs) can be used to generate action sequences directly, given an instruction in natural language with no additional domain information. However, while the outputs of LLMs are semantically correct, the generated task plans may not accurately map to acceptable actions and might encompass various linguistic ambiguities. LLM hallucinations pose another challenge for robot task planning, which results in content that is inconsistent with real-world facts or user inputs. In this paper, we propose a task planning method based on a constrained LLM prompt scheme, which can generate an executable action sequence from a command. An exceptional handling module is further proposed to deal with LLM hallucinations problem. This module can ensure the LLM-generated results are admissible in the current environment. We evaluate our method on the commands generated by the RoboCup@Home Command Generator, observing that the robot demonstrates exceptional performance in both comprehending instructions and executing tasks.
Create account to get full access
Overview
- This paper presents a new approach for task planning and exceptional handling in general-purpose service robots using large language models (LLMs).
- The proposed system leverages the natural language understanding and generation capabilities of LLMs to enable robots to handle a wide range of tasks and adapt to unexpected situations.
- The research aims to address the challenges of developing flexible and robust task planning systems for service robots that can operate in dynamic, unstructured environments.
Plain English Explanation
In this paper, the researchers developed a new way for service robots to plan and carry out different tasks using large language models (LLMs). LLMs are AI systems that can understand and generate human-like language.
The key idea is to use the language capabilities of LLMs to enable robots to handle a wide variety of tasks and adapt to unexpected situations that may come up. This is important because service robots often need to operate in complex, ever-changing environments, and they need to be able to respond flexibly to different situations.
The researchers designed a system that allows the robot to use an LLM to understand natural language instructions, reason about the steps needed to complete a task, and generate the appropriate actions. Crucially, the system also includes mechanisms to handle exceptional or unexpected cases that the robot might encounter, allowing it to adapt and find alternative solutions.
By leveraging the powerful language skills of LLMs, this approach aims to make service robots more flexible, capable, and robust, enabling them to assist humans in a wider range of real-world scenarios. [The researchers' work builds on previous efforts to personalize LLMs for robotic task planning and adapt task planning based on context and user preferences.]
Technical Explanation
The paper proposes a new framework for task planning and exceptional handling in general-purpose service robots using large language models (LLMs). The key components of the system include:
-
Language Understanding: The robot uses an LLM to comprehend natural language instructions and queries, extracting the relevant semantic information needed for task planning.
-
Task Planning: The system leverages the reasoning and generation capabilities of the LLM to plan the sequence of actions required to complete a given task, taking into account the current state of the environment and the robot's capabilities.
-
Exceptional Handling: The framework includes mechanisms to detect and handle exceptional or unexpected situations that may arise during task execution. The LLM is used to analyze the context, generate alternative plans, and decide on the appropriate course of action.
-
Interaction and Feedback: The robot can interact with users to clarify instructions, provide status updates, and seek guidance when faced with exceptional cases. User feedback is used to refine the system's performance over time.
The researchers evaluated their approach on a range of simulated service robot tasks and demonstrated its effectiveness in handling both standard and exceptional scenarios. The results show that the LLM-based system can outperform traditional task planning approaches in terms of flexibility, adaptability, and robustness. [This work builds on previous efforts to enable LLMs to perform robotic tasks adaptively and investigate the reasoning capabilities of LLMs for small-scale tasks.]
Critical Analysis
The researchers have presented an innovative approach to task planning and exceptional handling for service robots using large language models. The key strength of this work is its ability to leverage the natural language understanding and generation capabilities of LLMs to enable more flexible and adaptable robot behavior.
One potential limitation of the approach is the reliance on the LLM's performance, which can be affected by biases, errors, or limitations in the underlying language model. The researchers acknowledge this and suggest the need for careful model selection and ongoing performance monitoring and refinement.
Additionally, the paper does not provide a detailed analysis of the computational and memory requirements of the LLM-based system, which could be an important consideration for real-world deployment on resource-constrained robot platforms. [The researchers' work on a robotic multimodal perception and planning framework may provide insights into addressing these hardware-related challenges.]
Overall, the proposed approach represents a promising step towards more flexible and capable service robots, and the researchers have identified several avenues for future work, such as exploring hybrid planning approaches and investigating the transferability of the system to different robot platforms and task domains.
Conclusion
This paper presents a novel framework for task planning and exceptional handling in general-purpose service robots using large language models (LLMs). By leveraging the natural language understanding and generation capabilities of LLMs, the researchers have developed a system that can enable service robots to handle a wide range of tasks, adapt to unexpected situations, and interact more naturally with human users.
The key contributions of this work include the design of an LLM-based task planning and exceptional handling system, as well as the demonstration of its effectiveness in simulated service robot scenarios. The results suggest that this approach can lead to more flexible and robust robot behavior, which could have significant implications for the development of next-generation service robots that can operate reliably in complex, dynamic environments.
As the field of robotics continues to evolve, the integration of powerful language models like LLMs is likely to play an increasingly important role in enhancing the capabilities and adaptability of robotic systems. The research presented in this paper represents an important step in this direction, paving the way for more intelligent and versatile service robots that can better assist and collaborate with humans.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

LLM-Personalize: Aligning LLM Planners with Human Preferences via Reinforced Self-Training for Housekeeping Robots
Dongge Han, Trevor McInroe, Adam Jelley, Stefano V. Albrecht, Peter Bell, Amos Storkey
0
0
Large language models (LLMs) have shown significant potential for robotics applications, particularly task planning, by harnessing their language comprehension and text generation capabilities. However, in applications such as household robotics, a critical gap remains in the personalization of these models to individual user preferences. We introduce LLM-Personalize, a novel framework with an optimization pipeline designed to personalize LLM planners for household robotics. Our LLM-Personalize framework features an LLM planner that performs iterative planning in multi-room, partially-observable household scenarios, making use of a scene graph constructed with local observations. The generated plan consists of a sequence of high-level actions which are subsequently executed by a controller. Central to our approach is the optimization pipeline, which combines imitation learning and iterative self-training to personalize the LLM planner. In particular, the imitation learning phase performs initial LLM alignment from demonstrations, and bootstraps the model to facilitate effective iterative self-training, which further explores and aligns the model to user preferences. We evaluate LLM-Personalize on Housekeep, a challenging simulated real-world 3D benchmark for household rearrangements, and show that LLM-Personalize achieves more than a 30 percent increase in success rate over existing LLM planners, showcasing significantly improved alignment with human preferences. Project page: https://donggehan.github.io/projectllmpersonalize/.
4/23/2024
💬
Action Contextualization: Adaptive Task Planning and Action Tuning using Large Language Models
Sthithpragya Gupta, Kunpeng Yao, Loic Niederhauser, Aude Billard
0
0
Large Language Models (LLMs) present a promising frontier in robotic task planning by leveraging extensive human knowledge. Nevertheless, the current literature often overlooks the critical aspects of adaptability and error correction within robotic systems. This work aims to overcome this limitation by enabling robots to modify their motion strategies and select the most suitable task plans based on the context. We introduce a novel framework termed action contextualization, aimed at tailoring robot actions to the precise requirements of specific tasks, thereby enhancing adaptability through applying LLM-derived contextual insights. Our proposed motion metrics guarantee the feasibility and efficiency of adjusted motions, which evaluate robot performance and eliminate planning redundancies. Moreover, our framework supports online feedback between the robot and the LLM, enabling immediate modifications to the task plans and corrections of errors. Our framework has achieved an overall success rate of 81.25% through extensive validation. Finally, integrated with dynamic system (DS)-based robot controllers, the robotic arm-hand system demonstrates its proficiency in autonomously executing LLM-generated motion plans for sequential table-clearing tasks, rectifying errors without human intervention, and completing tasks, showcasing robustness against external disturbances. Our proposed framework features the potential to be integrated with modular control approaches, significantly enhancing robots' adaptability and autonomy in sequential task execution.
4/23/2024
Towards Natural Language-Driven Assembly Using Foundation Models
Omkar Joglekar, Tal Lancewicki, Shir Kozlovsky, Vladimir Tchuiev, Zohar Feldman, Dotan Di Castro
0
0
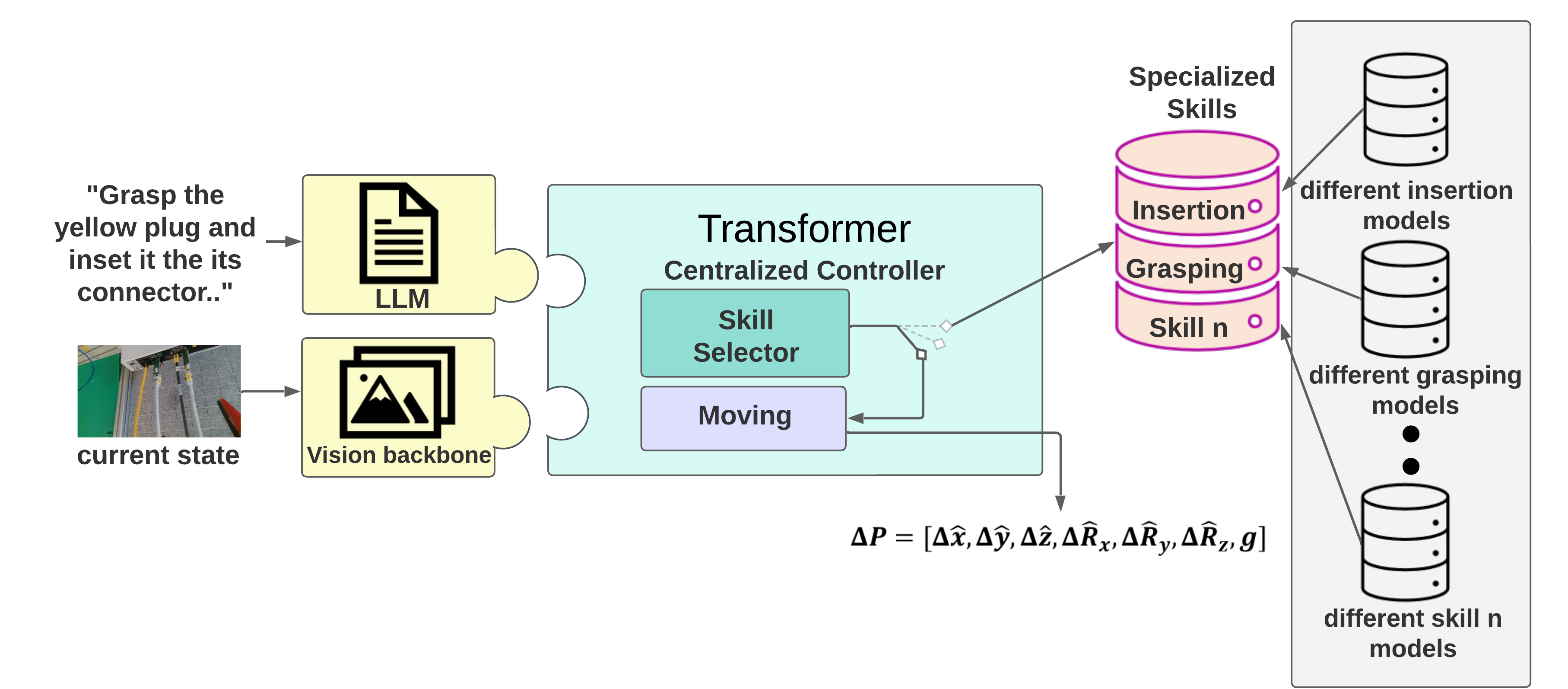
Large Language Models (LLMs) and strong vision models have enabled rapid research and development in the field of Vision-Language-Action models that enable robotic control. The main objective of these methods is to develop a generalist policy that can control robots with various embodiments. However, in industrial robotic applications such as automated assembly and disassembly, some tasks, such as insertion, demand greater accuracy and involve intricate factors like contact engagement, friction handling, and refined motor skills. Implementing these skills using a generalist policy is challenging because these policies might integrate further sensory data, including force or torque measurements, for enhanced precision. In our method, we present a global control policy based on LLMs that can transfer the control policy to a finite set of skills that are specifically trained to perform high-precision tasks through dynamic context switching. The integration of LLMs into this framework underscores their significance in not only interpreting and processing language inputs but also in enriching the control mechanisms for diverse and intricate robotic operations.
6/26/2024
📈
Enhancing the LLM-Based Robot Manipulation Through Human-Robot Collaboration
Haokun Liu, Yaonan Zhu, Kenji Kato, Atsushi Tsukahara, Izumi Kondo, Tadayoshi Aoyama, Yasuhisa Hasegawa
0
0
Large Language Models (LLMs) are gaining popularity in the field of robotics. However, LLM-based robots are limited to simple, repetitive motions due to the poor integration between language models, robots, and the environment. This paper proposes a novel approach to enhance the performance of LLM-based autonomous manipulation through Human-Robot Collaboration (HRC). The approach involves using a prompted GPT-4 language model to decompose high-level language commands into sequences of motions that can be executed by the robot. The system also employs a YOLO-based perception algorithm, providing visual cues to the LLM, which aids in planning feasible motions within the specific environment. Additionally, an HRC method is proposed by combining teleoperation and Dynamic Movement Primitives (DMP), allowing the LLM-based robot to learn from human guidance. Real-world experiments have been conducted using the Toyota Human Support Robot for manipulation tasks. The outcomes indicate that tasks requiring complex trajectory planning and reasoning over environments can be efficiently accomplished through the incorporation of human demonstrations.
6/21/2024