Towards No-Code Programming of Cobots: Experiments with Code Synthesis by Large Code Models for Conversational Programming

0

Sign in to get full access
Overview
- The paper explores using large language models (LLMs) for "no-code" programming of collaborative robots (cobots).
- It aims to enable conversational programming, where users can instruct cobots through natural language rather than writing code.
- The key idea is to leverage the code generation capabilities of LLMs to translate high-level conversational instructions into executable robot programs.
Plain English Explanation
The researchers in this paper are looking at a way to program robot arms, called "cobots," without having to write traditional computer code. Instead, they want to allow people to give the robots instructions using normal conversation, and have the robot figure out what to do on its own.
The main idea is to use large language models - powerful AI systems that can understand and generate human language - to translate the conversational instructions into actual robot programs. So a person could say something like "Pick up the red block and place it on the table," and the language model would generate the specific code the robot needs to carry out that task.
This could make programming robots much more accessible, since people wouldn't need to learn complex coding languages. It could open up robotics to a wider range of users who don't have technical programming skills. The researchers are exploring how well these language models can handle the nuances of robot control and whether this "no-code" approach is feasible.
Technical Explanation
The paper presents experiments using large language models for "no-code programming" of collaborative robots (cobots). The key idea is to leverage the code generation capabilities of LLMs to translate high-level conversational instructions into executable robot programs, enabling a more natural, conversational programming interface.
The authors first review related work on using LLMs for robot programming and assembly. They then describe their experimental setup, where they fine-tuned the GPT-3 LLM on a dataset of conversational robot programming instructions and corresponding robot programs.
The technical details of the model architecture and training process are provided. Key insights from the experiments include:
- The LLM was able to generate executable robot programs from conversational instructions with reasonable accuracy.
- Performance was better for simpler tasks but declined for more complex multi-step programs.
- The model struggled with maintaining task context and ensuring programs were logically consistent.
Critical Analysis
The paper highlights some of the key challenges in using LLMs for "no-code" robot programming. While the results demonstrate promising initial capabilities, the authors acknowledge several limitations of the current approach:
- The model's performance degrades for more complex, multi-step programs, suggesting the need for more advanced reasoning and planning capabilities.
- Ensuring logical consistency and maintaining task context across conversational interactions remains an open challenge.
- The current dataset and experimental setup may not fully capture the nuances of real-world robot programming.
Further research is needed to address these limitations and explore ways to make the conversational programming approach more robust and scalable. Potential areas for improvement include incorporating commonsense reasoning, modeling long-term task goals, and leveraging interactive dialogue to clarify and refine instructions.
Conclusion
This paper presents an intriguing exploration of using large language models to enable "no-code" programming of collaborative robots through natural language interactions. While the initial results are promising, significant challenges remain in translating high-level conversational instructions into reliable, executable robot programs.
Addressing these challenges could unlock new possibilities for making robotics and automation more accessible to a wider range of users. By bridging the gap between human language and machine control, this line of research could pave the way for more intuitive and inclusive human-robot collaboration in various domains, from manufacturing to assistive technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Towards No-Code Programming of Cobots: Experiments with Code Synthesis by Large Code Models for Conversational Programming
Chalamalasetti Kranti, Sherzod Hakimov, David Schlangen
While there has been a lot of research recently on robots in household environments, at the present time, most robots in existence can be found on shop floors, and most interactions between humans and robots happen there. ``Collaborative robots'' (cobots) designed to work alongside humans on assembly lines traditionally require expert programming, limiting ability to make changes, or manual guidance, limiting expressivity of the resulting programs. To address these limitations, we explore using Large Language Models (LLMs), and in particular, their abilities of doing in-context learning, for conversational code generation. As a first step, we define RATS, the ``Repetitive Assembly Task'', a 2D building task designed to lay the foundation for simulating industry assembly scenarios. In this task, a `programmer' instructs a cobot, using natural language, on how a certain assembly is to be built; that is, the programmer induces a program, through natural language. We create a dataset that pairs target structures with various example instructions (human-authored, template-based, and model-generated) and example code. With this, we systematically evaluate the capabilities of state-of-the-art LLMs for synthesising this kind of code, given in-context examples. Evaluating in a simulated environment, we find that LLMs are capable of generating accurate `first order code' (instruction sequences), but have problems producing `higher-order code' (abstractions such as functions, or use of loops).
Read more9/19/2024
0
Toward Automated Programming for Robotic Assembly Using ChatGPT
Annabella Macaluso, Nicholas Cote, Sachin Chitta
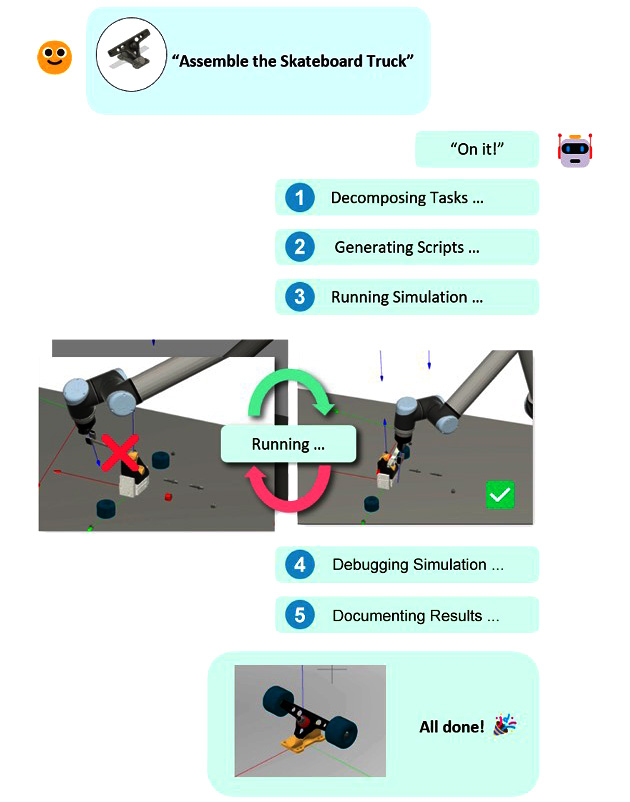
Despite significant technological advancements, the process of programming robots for adaptive assembly remains labor-intensive, demanding expertise in multiple domains and often resulting in task-specific, inflexible code. This work explores the potential of Large Language Models (LLMs), like ChatGPT, to automate this process, leveraging their ability to understand natural language instructions, generalize examples to new tasks, and write code. In this paper, we suggest how these abilities can be harnessed and applied to real-world challenges in the manufacturing industry. We present a novel system that uses ChatGPT to automate the process of programming robots for adaptive assembly by decomposing complex tasks into simpler subtasks, generating robot control code, executing the code in a simulated workcell, and debugging syntax and control errors, such as collisions. We outline the architecture of this system and strategies for task decomposition and code generation. Finally, we demonstrate how our system can autonomously program robots for various assembly tasks in a real-world project.
Read more5/15/2024

0
Cocobo: Exploring Large Language Models as the Engine for End-User Robot Programming
Yate Ge, Yi Dai, Run Shan, Kechun Li, Yuanda Hu, Xiaohua Sun
End-user development allows everyday users to tailor service robots or applications to their needs. One user-friendly approach is natural language programming. However, it encounters challenges such as an expansive user expression space and limited support for debugging and editing, which restrict its application in end-user programming. The emergence of large language models (LLMs) offers promising avenues for the translation and interpretation between human language instructions and the code executed by robots, but their application in end-user programming systems requires further study. We introduce Cocobo, a natural language programming system with interactive diagrams powered by LLMs. Cocobo employs LLMs to understand users' authoring intentions, generate and explain robot programs, and facilitate the conversion between executable code and flowchart representations. Our user study shows that Cocobo has a low learning curve, enabling even users with zero coding experience to customize robot programs successfully.
Read more7/31/2024
0
Enhancing Human-Robot Collaborative Assembly in Manufacturing Systems Using Large Language Models
Jonghan Lim, Sujani Patel, Alex Evans, John Pimley, Yifei Li, Ilya Kovalenko
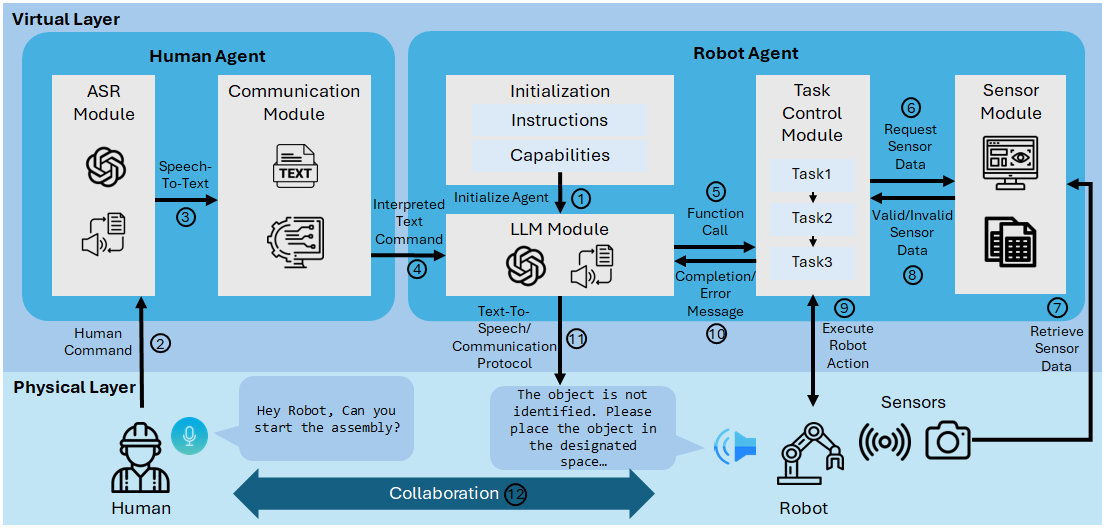
The development of human-robot collaboration has the ability to improve manufacturing system performance by leveraging the unique strengths of both humans and robots. On the shop floor, human operators contribute with their adaptability and flexibility in dynamic situations, while robots provide precision and the ability to perform repetitive tasks. However, the communication gap between human operators and robots limits the collaboration and coordination of human-robot teams in manufacturing systems. Our research presents a human-robot collaborative assembly framework that utilizes a large language model for enhancing communication in manufacturing environments. The framework facilitates human-robot communication by integrating voice commands through natural language for task management. A case study for an assembly task demonstrates the framework's ability to process natural language inputs and address real-time assembly challenges, emphasizing adaptability to language variation and efficiency in error resolution. The results suggest that large language models have the potential to improve human-robot interaction for collaborative manufacturing assembly applications.
Read more6/24/2024