Towards Physically-Realizable Adversarial Attacks in Embodied Vision Navigation

0

Sign in to get full access
Overview
- The paper explores ways to create physically-realizable adversarial attacks on embodied vision navigation systems.
- Adversarial attacks aim to fool AI models by making small, imperceptible changes to input data.
- The authors focus on making these attacks work in the physical world, not just in simulations.
- Their approach involves optimizing adversarial perturbations that can be applied to real-world objects or environments.
Plain English Explanation
The researchers in this paper looked at ways to trick artificial intelligence (AI) vision systems that are used for navigation, such as those found in self-driving cars or robots. These types of AI models can sometimes be fooled by making small, hard-to-detect changes to what the system sees.
The key innovation here is that the researchers wanted to make these "adversarial attacks" work in the real world, not just in computer simulations. To do this, they developed methods to optimize the adversarial changes so that they could be applied to actual objects or environments. This means an attacker could, for example, modify a real-world sign or piece of graffiti to confuse a self-driving car's vision system.
Technical Explanation
The core of this paper is developing techniques to create physically-realizable adversarial attacks against embodied vision navigation systems. This involves two key steps:
-
Generating adversarial perturbations: The authors use optimization methods to find small changes to visual inputs that can fool the target AI model, while constraining the perturbations to be realistic and physically plausible.
-
Applying the perturbations: They then explore ways to apply these adversarial perturbations to real-world objects and environments, such as by printing them on stickers or projecting them as patterns.
The key innovation is balancing the goals of maximizing the adversarial effect while ensuring the perturbations can be realized in the physical world. This requires careful optimization and constraints on the types of changes allowed.
Critical Analysis
The authors acknowledge several limitations of their work. First, their methods have only been tested in simulation, not the real world. Applying the adversarial perturbations to physical objects introduces additional challenges around lighting, camera angles, and other environmental factors.
Additionally, the paper does not address potential defenses against these types of attacks. As the authors note, developing robust vision systems that can withstand adversarial perturbations is an important area for future research.
It's also worth considering the ethical implications of this type of research. While the goal is to understand vulnerabilities in AI systems, the techniques could potentially be misused to deliberately undermine the safety and reliability of autonomous technologies.
Conclusion
This paper presents a novel approach for creating physically-realizable adversarial attacks on embodied vision navigation systems. By optimizing adversarial perturbations that can be applied to real-world objects and environments, the researchers have taken a step towards making these types of attacks a real-world threat.
While further work is needed to fully validate the techniques in the physical world, this research highlights the importance of developing robust and secure AI systems that can withstand adversarial attacks. As autonomous technologies become more widespread, ensuring their reliability and safety will be crucial.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Towards Physically-Realizable Adversarial Attacks in Embodied Vision Navigation
Meng Chen, Jiawei Tu, Chao Qi, Yonghao Dang, Feng Zhou, Wei Wei, Jianqin Yin
The deployment of embodied navigation agents in safety-critical environments raises concerns about their vulnerability to adversarial attacks on deep neural networks. However, current attack methods often lack practicality due to challenges in transitioning from the digital to the physical world, while existing physical attacks for object detection fail to achieve both multi-view effectiveness and naturalness. To address this, we propose a practical attack method for embodied navigation by attaching adversarial patches with learnable textures and opacity to objects. Specifically, to ensure effectiveness across varying viewpoints, we employ a multi-view optimization strategy based on object-aware sampling, which uses feedback from the navigation model to optimize the patch's texture. To make the patch inconspicuous to human observers, we introduce a two-stage opacity optimization mechanism, where opacity is refined after texture optimization. Experimental results show our adversarial patches reduce navigation success rates by about 40%, outperforming previous methods in practicality, effectiveness, and naturalness. Code is available at: [https://github.com/chen37058/Physical-Attacks-in-Embodied-Navigation].
Read more9/20/2024
🌿
0
Patch of Invisibility: Naturalistic Physical Black-Box Adversarial Attacks on Object Detectors
Raz Lapid, Eylon Mizrahi, Moshe Sipper
Adversarial attacks on deep-learning models have been receiving increased attention in recent years. Work in this area has mostly focused on gradient-based techniques, so-called white-box attacks, wherein the attacker has access to the targeted model's internal parameters; such an assumption is usually unrealistic in the real world. Some attacks additionally use the entire pixel space to fool a given model, which is neither practical nor physical (i.e., real-world). On the contrary, we propose herein a direct, black-box, gradient-free method that uses the learned image manifold of a pretrained generative adversarial network (GAN) to generate naturalistic physical adversarial patches for object detectors. To our knowledge this is the first and only method that performs black-box physical attacks directly on object-detection models, which results with a model-agnostic attack. We show that our proposed method works both digitally and physically. We compared our approach against four different black-box attacks with different configurations. Our approach outperformed all other approaches that were tested in our experiments by a large margin.
Read more8/20/2024
0
ControlLoc: Physical-World Hijacking Attack on Visual Perception in Autonomous Driving
Chen Ma, Ningfei Wang, Zhengyu Zhao, Qian Wang, Qi Alfred Chen, Chao Shen
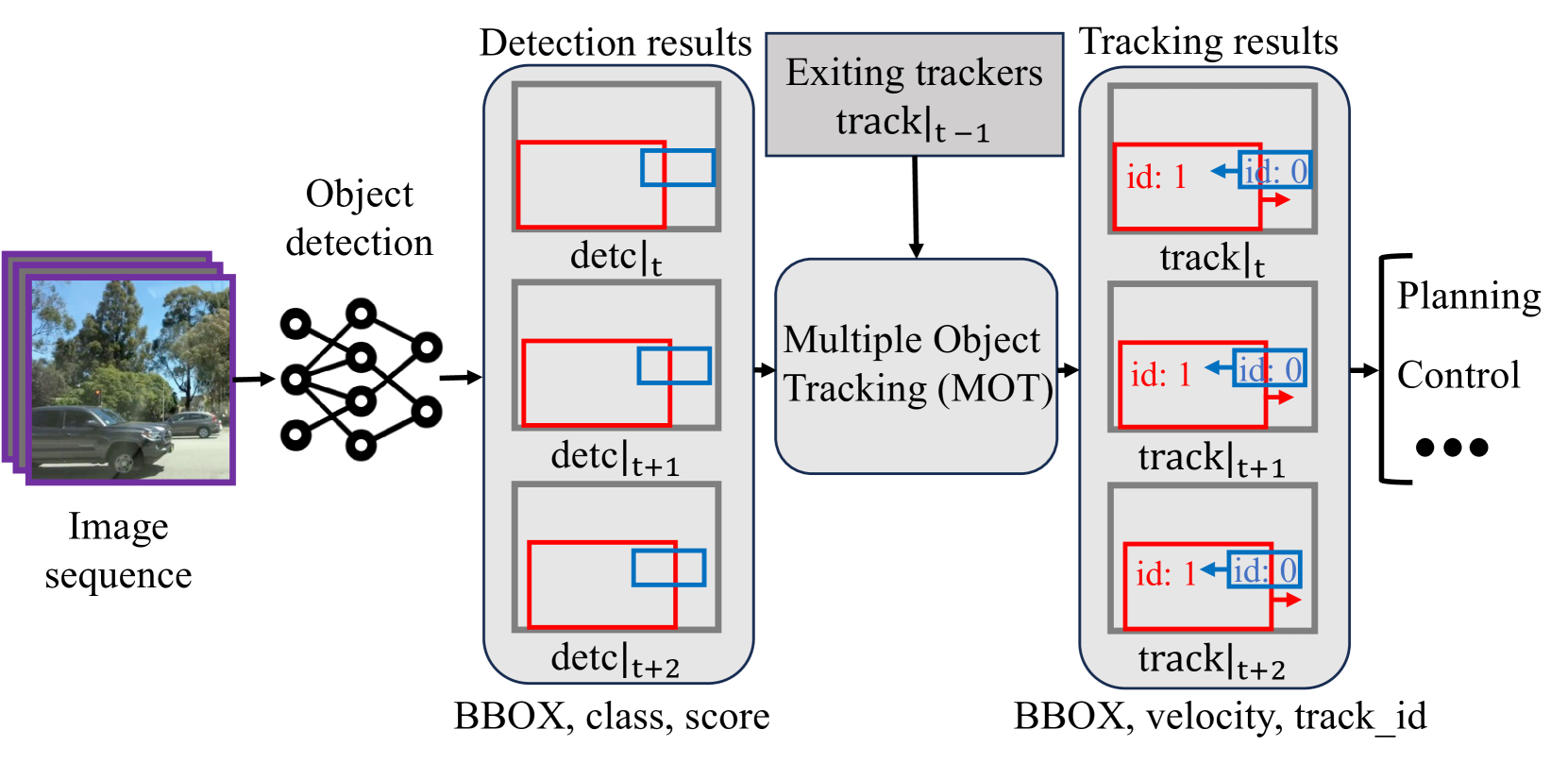
Recent research in adversarial machine learning has focused on visual perception in Autonomous Driving (AD) and has shown that printed adversarial patches can attack object detectors. However, it is important to note that AD visual perception encompasses more than just object detection; it also includes Multiple Object Tracking (MOT). MOT enhances the robustness by compensating for object detection errors and requiring consistent object detection results across multiple frames before influencing tracking results and driving decisions. Thus, MOT makes attacks on object detection alone less effective. To attack such robust AD visual perception, a digital hijacking attack has been proposed to cause dangerous driving scenarios. However, this attack has limited effectiveness. In this paper, we introduce a novel physical-world adversarial patch attack, ControlLoc, designed to exploit hijacking vulnerabilities in entire AD visual perception. ControlLoc utilizes a two-stage process: initially identifying the optimal location for the adversarial patch, and subsequently generating the patch that can modify the perceived location and shape of objects with the optimal location. Extensive evaluations demonstrate the superior performance of ControlLoc, achieving an impressive average attack success rate of around 98.1% across various AD visual perceptions and datasets, which is four times greater effectiveness than the existing hijacking attack. The effectiveness of ControlLoc is further validated in physical-world conditions, including real vehicle tests under different conditions such as outdoor light conditions with an average attack success rate of 77.5%. AD system-level impact assessments are also included, such as vehicle collision, using industry-grade AD systems and production-grade AD simulators with an average vehicle collision rate and unnecessary emergency stop rate of 81.3%.
Read more6/11/2024

0
Searching Realistic-Looking Adversarial Objects For Autonomous Driving Systems
Shengxiang Sun, Shenzhe Zhu
Numerous studies on adversarial attacks targeting self-driving policies fail to incorporate realistic-looking adversarial objects, limiting real-world applicability. Building upon prior research that facilitated the transition of adversarial objects from simulations to practical applications, this paper discusses a modified gradient-based texture optimization method to discover realistic-looking adversarial objects. While retaining the core architecture and techniques of the prior research, the proposed addition involves an entity termed the 'Judge'. This agent assesses the texture of a rendered object, assigning a probability score reflecting its realism. This score is integrated into the loss function to encourage the NeRF object renderer to concurrently learn realistic and adversarial textures. The paper analyzes four strategies for developing a robust 'Judge': 1) Leveraging cutting-edge vision-language models. 2) Fine-tuning open-sourced vision-language models. 3) Pretraining neurosymbolic systems. 4) Utilizing traditional image processing techniques. Our findings indicate that strategies 1) and 4) yield less reliable outcomes, pointing towards strategies 2) or 3) as more promising directions for future research.
Read more5/21/2024