Offline Tracking with Object Permanence

0
✅
Sign in to get full access
Overview
- Proposes an offline tracking model to handle temporally occluded objects in autonomous driving datasets
- Leverages the concept of object permanence to recover occluded object trajectories
- Includes a standard online tracker, a re-identification (Re-ID) module, and a track completion module
- Utilizes the vectorized map as an input to refine tracking results and recover occlusions
- Achieves state-of-the-art performance in 3D multi-object tracking
Plain English Explanation
Manually labeling datasets for autonomous driving is a time-consuming and expensive process. An alternative is to automatically label the datasets using an offline perception system. However, this can be challenging when objects are temporarily hidden or occluded, as is common in real-world driving scenarios.
To address this, the proposed model takes an innovative approach by leveraging the concept of object permanence. This means that even when an object is not visible, the model understands that it still exists and continues to track it. The model has three main components:
- A standard online tracker that handles basic object tracking.
- A re-identification (Re-ID) module that associates tracklets before and after occlusion, effectively "reconnecting" the fragmented tracks.
- A track completion module that uses the vectorized map as an input to further refine the tracking results and recover the full occluded trajectories.
By combining these elements, the model can effectively recover the trajectories of objects that were temporarily occluded, significantly improving on the original online tracking results. This makes the model a valuable tool for offline auto-labeling of autonomous driving datasets, helping to reduce the high labor costs associated with manual labeling.
Technical Explanation
The proposed model consists of three main components: a standard online tracker, a re-identification (Re-ID) module, and a track completion module. The online tracker handles basic object tracking, while the Re-ID module associates tracklets before and after occlusion events. The track completion module uses the vectorized map as an input to refine the tracking results and recover the occluded object trajectories.
The Re-ID module and track completion module are designed to work together to address the issue of temporally occluded objects, which are common in autonomous driving datasets but underexplored in offline auto-labeling. By leveraging the concept of object permanence, the model can effectively "reconnect" the fragmented tracks and recover the full trajectories of occluded objects.
The authors evaluate the model's performance on 3D multi-object tracking benchmarks and show that it achieves state-of-the-art results, significantly improving over the original online tracking output. This demonstrates the model's potential to be a useful plugin for offline auto-labeling systems, helping to reduce the high labor costs associated with manual dataset annotation.
Critical Analysis
The paper presents a novel and promising approach to handling occluded objects in autonomous driving datasets, an important and underexplored challenge in the field of offline auto-labeling. The authors' use of the object permanence concept is a clever and insightful way to address this issue.
However, the paper does not delve into potential limitations or caveats of the proposed model. For example, it would be valuable to understand how the model performs in more complex occlusion scenarios, such as when multiple objects are occluded simultaneously or when the occlusion duration is extended. Additionally, the reliance on the vectorized map as an input raises questions about the generalizability of the approach to scenarios where such detailed map data may not be available.
Further research could also explore the model's robustness to noisy or incomplete sensor data, as well as its computational efficiency and scalability to large-scale datasets. Comparisons to other approaches for recovering occluded object tracks would also help to better situate the contributions of this work.
Overall, the paper presents a compelling and innovative solution to a significant challenge in autonomous driving data annotation. By continuing to refine and validate the model, the authors have the potential to make a meaningful impact on the efficiency and quality of dataset labeling for this important field.
Conclusion
This paper proposes an offline tracking model that focuses on recovering the trajectories of occluded objects in autonomous driving datasets. By leveraging the concept of object permanence and incorporating a Re-ID module and track completion module, the model can effectively "reconnect" fragmented tracks and recover the full trajectories of temporarily hidden objects.
The authors demonstrate that their model achieves state-of-the-art performance in 3D multi-object tracking, significantly improving over the original online tracking results. This suggests that the proposed approach could be a valuable tool for offline auto-labeling systems, helping to reduce the expensive manual labor costs associated with dataset annotation for autonomous driving.
Further research is needed to explore the model's limitations, robustness, and generalizability, but the core ideas presented in this work represent an important step forward in addressing a critical challenge in this field.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
✅
0
Offline Tracking with Object Permanence
Xianzhong Liu, Holger Caesar
To reduce the expensive labor cost for manual labeling autonomous driving datasets, an alternative is to automatically label the datasets using an offline perception system. However, objects might be temporally occluded. Such occlusion scenarios in the datasets are common yet underexplored in offline auto labeling. In this work, we propose an offline tracking model that focuses on occluded object tracks. It leverages the concept of object permanence which means objects continue to exist even if they are not observed anymore. The model contains three parts: a standard online tracker, a re-identification (Re-ID) module that associates tracklets before and after occlusion, and a track completion module that completes the fragmented tracks. The Re-ID module and the track completion module use the vectorized map as one of the inputs to refine the tracking results with occlusion. The model can effectively recover the occluded object trajectories. It achieves state-of-the-art performance in 3D multi-object tracking by significantly improving the original online tracking result, showing its potential to be applied in offline auto labeling as a useful plugin to improve tracking by recovering occlusions.
Read more5/7/2024
0
Tracking-Assisted Object Detection with Event Cameras
Ting-Kang Yen, Igor Morawski, Shusil Dangi, Kai He, Chung-Yi Lin, Jia-Fong Yeh, Hung-Ting Su, Winston Hsu
Event-based object detection has recently garnered attention in the computer vision community due to the exceptional properties of event cameras, such as high dynamic range and no motion blur. However, feature asynchronism and sparsity cause invisible objects due to no relative motion to the camera, posing a significant challenge in the task. Prior works have studied various implicit-learned memories to retain as many temporal cues as possible. However, implicit memories still struggle to preserve long-term features effectively. In this paper, we consider those invisible objects as pseudo-occluded objects and aim to detect them by tracking through occlusions. Firstly, we introduce the visibility attribute of objects and contribute an auto-labeling algorithm to not only clean the existing event camera dataset but also append additional visibility labels to it. Secondly, we exploit tracking strategies for pseudo-occluded objects to maintain their permanence and retain their bounding boxes, even when features have not been available for a very long time. These strategies can be treated as an explicit-learned memory guided by the tracking objective to record the displacements of objects across frames. Lastly, we propose a spatio-temporal feature aggregation module to enrich the latent features and a consistency loss to increase the robustness of the overall pipeline. We conduct comprehensive experiments to verify our method's effectiveness where still objects are retained, but real occluded objects are discarded. The results demonstrate that (1) the additional visibility labels can assist in supervised training, and (2) our method outperforms state-of-the-art approaches with a significant improvement of 7.9% absolute mAP.
Read more9/19/2024
0
Visual Multi-Object Tracking with Re-Identification and Occlusion Handling using Labeled Random Finite Sets
Linh Van Ma, Tran Thien Dat Nguyen, Changbeom Shim, Du Yong Kim, Namkoo Ha, Moongu Jeon
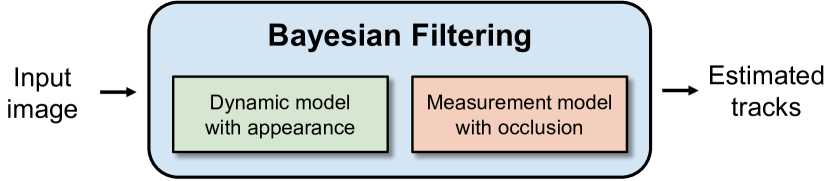
This paper proposes an online visual multi-object tracking (MOT) algorithm that resolves object appearance-reappearance and occlusion. Our solution is based on the labeled random finite set (LRFS) filtering approach, which in principle, addresses disappearance, appearance, reappearance, and occlusion via a single Bayesian recursion. However, in practice, existing numerical approximations cause reappearing objects to be initialized as new tracks, especially after long periods of being undetected. In occlusion handling, the filter's efficacy is dictated by trade-offs between the sophistication of the occlusion model and computational demand. Our contribution is a novel modeling method that exploits object features to address reappearing objects whilst maintaining a linear complexity in the number of detections. Moreover, to improve the filter's occlusion handling, we propose a fuzzy detection model that takes into consideration the overlapping areas between tracks and their sizes. We also develop a fast version of the filter to further reduce the computational time. The source code is publicly available at https://github.com/linh-gist/mv-glmb-ab.
Read more9/4/2024
0
UNIT: Unsupervised Online Instance Segmentation through Time
Corentin Sautier, Gilles Puy, Alexandre Boulch, Renaud Marlet, Vincent Lepetit
Online object segmentation and tracking in Lidar point clouds enables autonomous agents to understand their surroundings and make safe decisions. Unfortunately, manual annotations for these tasks are prohibitively costly. We tackle this problem with the task of class-agnostic unsupervised online instance segmentation and tracking. To that end, we leverage an instance segmentation backbone and propose a new training recipe that enables the online tracking of objects. Our network is trained on pseudo-labels, eliminating the need for manual annotations. We conduct an evaluation using metrics adapted for temporal instance segmentation. Computing these metrics requires temporally-consistent instance labels. When unavailable, we construct these labels using the available 3D bounding boxes and semantic labels in the dataset. We compare our method against strong baselines and demonstrate its superiority across two different outdoor Lidar datasets.
Read more9/14/2024