Traj-LLM: A New Exploration for Empowering Trajectory Prediction with Pre-trained Large Language Models
2405.04909
0
0
🔮
Abstract
Predicting the future trajectories of dynamic traffic actors is a cornerstone task in autonomous driving. Though existing notable efforts have resulted in impressive performance improvements, a gap persists in scene cognitive and understanding of the complex traffic semantics. This paper proposes Traj-LLM, the first to investigate the potential of using Large Language Models (LLMs) without explicit prompt engineering to generate future motion from agents' past/observed trajectories and scene semantics. Traj-LLM starts with sparse context joint coding to dissect the agent and scene features into a form that LLMs understand. On this basis, we innovatively explore LLMs' powerful comprehension abilities to capture a spectrum of high-level scene knowledge and interactive information. Emulating the human-like lane focus cognitive function and enhancing Traj-LLM's scene comprehension, we introduce lane-aware probabilistic learning powered by the pioneering Mamba module. Finally, a multi-modal Laplace decoder is designed to achieve scene-compliant multi-modal predictions. Extensive experiments manifest that Traj-LLM, fortified by LLMs' strong prior knowledge and understanding prowess, together with lane-aware probability learning, outstrips state-of-the-art methods across evaluation metrics. Moreover, the few-shot analysis further substantiates Traj-LLM's performance, wherein with just 50% of the dataset, it outperforms the majority of benchmarks relying on complete data utilization. This study explores equipping the trajectory prediction task with advanced capabilities inherent in LLMs, furnishing a more universal and adaptable solution for forecasting agent motion in a new way.
Create account to get full access
Overview
- This paper proposes a novel approach called Traj-LLM that leverages the power of Large Language Models (LLMs) to generate future motion trajectories for dynamic traffic actors in autonomous driving scenarios.
- Traj-LLM aims to address the gap in scene cognitive understanding and complex traffic semantics that persists in existing trajectory prediction methods.
- The key innovations of Traj-LLM include using LLMs without explicit prompt engineering, sparse context joint coding, lane-aware probabilistic learning, and a multi-modal Laplace decoder.
Plain English Explanation
Predicting the future paths of vehicles and other moving objects is crucial for autonomous driving. While current methods have made impressive progress, they still struggle to fully understand the complex dynamics and high-level semantics of real-world traffic scenes.
To tackle this challenge, the researchers developed a new system called Traj-LLM that leverages the powerful language understanding capabilities of large language models. Unlike previous approaches, Traj-LLM does not require carefully crafting prompts to guide the language model. Instead, it starts by encoding the agent's past trajectory and the scene features into a form that the language model can understand.
The language model's innate ability to grasp high-level concepts and interactions in the scene is then harnessed to generate realistic future trajectories. To further enhance the system's understanding, the researchers introduced a lane-aware probabilistic learning module inspired by how humans focus on lane-level information when predicting vehicle motion.
Finally, Traj-LLM employs a multi-modal Laplace decoder to produce a diverse set of plausible future trajectories that respect the constraints of the traffic scene.
The key advantage of Traj-LLM is its ability to leverage the powerful knowledge and reasoning capabilities of large language models, without requiring extensive manual feature engineering or data curation. This makes the system more universal and adaptable compared to traditional trajectory prediction methods.
Technical Explanation
The paper proposes Traj-LLM, a novel approach that leverages large language models to generate future motion trajectories for dynamic traffic actors in autonomous driving scenarios.
Traj-LLM starts by encoding the agent's past trajectory and the scene features into a sparse context joint representation that the language model can understand. This allows the system to tap into the language model's powerful comprehension abilities to capture a wide range of high-level scene knowledge and interactive information.
To further enhance the system's scene understanding, the researchers introduce a lane-aware probabilistic learning module, inspired by the lane-focus cognitive function in humans. This module, powered by a pioneering Mamba component, enables lane-aware probability learning for more accurate trajectory prediction.
Finally, Traj-LLM employs a multi-modal Laplace decoder to generate a diverse set of scene-compliant future trajectories for the dynamic traffic actors.
Extensive experiments demonstrate that Traj-LLM, leveraging the strong prior knowledge and understanding prowess of large language models, along with the lane-aware probability learning, outperforms state-of-the-art methods across various evaluation metrics.
Moreover, the few-shot analysis shows that Traj-LLM can achieve superior performance even with just 50% of the training data, outperforming benchmarks that rely on complete data utilization.
This study explores a novel way of equipping the trajectory prediction task with the advanced capabilities inherent in large language models, providing a more universal and adaptable solution for forecasting agent motion in complex traffic scenes.
Critical Analysis
The paper presents a compelling approach to leveraging the power of large language models for the task of predicting future trajectories of dynamic traffic actors.
One of the key strengths of the proposed Traj-LLM system is its ability to capture high-level scene semantics and interactive information without the need for extensive prompt engineering. This makes the system more universal and adaptable compared to traditional methods that rely on hand-crafted features and domain-specific knowledge.
The lane-aware probabilistic learning module is a particularly interesting innovation, as it takes inspiration from how humans focus on lane-level information when predicting vehicle motion. This suggests that incorporating cognitive models can be a fruitful approach for improving the performance of trajectory prediction systems.
However, the paper does not discuss the computational and memory requirements of the Traj-LLM system, which could be a concern when deploying it in real-world autonomous driving scenarios with limited computing resources. Additionally, the generalization of the system to diverse traffic environments and cultural contexts is not explicitly addressed, which could be an important area for future research.
Overall, the Traj-LLM approach represents an exciting step forward in leveraging the capabilities of large language models for trajectory prediction and demonstrates the potential for advanced AI techniques to enhance autonomous driving systems.
Conclusion
This paper introduces Traj-LLM, a novel approach that harnesses the power of large language models to generate future motion trajectories for dynamic traffic actors in autonomous driving scenarios. By encoding the agent's past trajectory and scene features into a form understandable by the language model, and leveraging its innate ability to grasp high-level concepts and interactions, Traj-LLM is able to produce realistic and scene-compliant future trajectories.
The key innovations of Traj-LLM include the sparse context joint coding, the lane-aware probabilistic learning module, and the multi-modal Laplace decoder. These components work together to enable Traj-LLM to outperform state-of-the-art methods in trajectory prediction, while also demonstrating strong performance even with limited training data.
The researchers have taken an important step in exploring how large language models can be leveraged to enhance autonomous driving systems, providing a more universal and adaptable solution for the critical task of predicting agent motion. This work opens up exciting possibilities for the integration of advanced AI techniques into autonomous driving, with the potential to significantly improve the safety and reliability of these systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

iMotion-LLM: Motion Prediction Instruction Tuning
Abdulwahab Felemban, Eslam Mohamed Bakr, Xiaoqian Shen, Jian Ding, Abduallah Mohamed, Mohamed Elhoseiny
0
0
We introduce iMotion-LLM: a Multimodal Large Language Models (LLMs) with trajectory prediction, tailored to guide interactive multi-agent scenarios. Different from conventional motion prediction approaches, iMotion-LLM capitalizes on textual instructions as key inputs for generating contextually relevant trajectories. By enriching the real-world driving scenarios in the Waymo Open Dataset with textual motion instructions, we created InstructWaymo. Leveraging this dataset, iMotion-LLM integrates a pretrained LLM, fine-tuned with LoRA, to translate scene features into the LLM input space. iMotion-LLM offers significant advantages over conventional motion prediction models. First, it can generate trajectories that align with the provided instructions if it is a feasible direction. Second, when given an infeasible direction, it can reject the instruction, thereby enhancing safety. These findings act as milestones in empowering autonomous navigation systems to interpret and predict the dynamics of multi-agent environments, laying the groundwork for future advancements in this field.
6/12/2024
💬
Large Language Models for Mobility in Transportation Systems: A Survey on Forecasting Tasks
Zijian Zhang, Yujie Sun, Zepu Wang, Yuqi Nie, Xiaobo Ma, Peng Sun, Ruolin Li
0
0
Mobility analysis is a crucial element in the research area of transportation systems. Forecasting traffic information offers a viable solution to address the conflict between increasing transportation demands and the limitations of transportation infrastructure. Predicting human travel is significant in aiding various transportation and urban management tasks, such as taxi dispatch and urban planning. Machine learning and deep learning methods are favored for their flexibility and accuracy. Nowadays, with the advent of large language models (LLMs), many researchers have combined these models with previous techniques or applied LLMs to directly predict future traffic information and human travel behaviors. However, there is a lack of comprehensive studies on how LLMs can contribute to this field. This survey explores existing approaches using LLMs for mobility forecasting problems. We provide a literature review concerning the forecasting applications within transportation systems, elucidating how researchers utilize LLMs, showcasing recent state-of-the-art advancements, and identifying the challenges that must be overcome to fully leverage LLMs in this domain.
5/7/2024

Spatial-Temporal Large Language Model for Traffic Prediction
Chenxi Liu, Sun Yang, Qianxiong Xu, Zhishuai Li, Cheng Long, Ziyue Li, Rui Zhao
0
0
Traffic prediction, an essential component for intelligent transportation systems, endeavours to use historical data to foresee future traffic features at specific locations. Although existing traffic prediction models often emphasize developing complex neural network structures, their accuracy has not improved. Recently, large language models have shown outstanding capabilities in time series analysis. Differing from existing models, LLMs progress mainly through parameter expansion and extensive pretraining while maintaining their fundamental structures. Motivated by these developments, we propose a Spatial-Temporal Large Language Model (ST-LLM) for traffic prediction. In the ST-LLM, we define timesteps at each location as tokens and design a spatial-temporal embedding to learn the spatial location and global temporal patterns of these tokens. Additionally, we integrate these embeddings by a fusion convolution to each token for a unified spatial-temporal representation. Furthermore, we innovate a partially frozen attention strategy to adapt the LLM to capture global spatial-temporal dependencies for traffic prediction. Comprehensive experiments on real traffic datasets offer evidence that ST-LLM is a powerful spatial-temporal learner that outperforms state-of-the-art models. Notably, the ST-LLM also exhibits robust performance in both few-shot and zero-shot prediction scenarios. The code is publicly available at https://github.com/ChenxiLiu-HNU/ST-LLM.
6/19/2024
Deciphering Human Mobility: Inferring Semantics of Trajectories with Large Language Models
Yuxiao Luo, Zhongcai Cao, Xin Jin, Kang Liu, Ling Yin
0
0
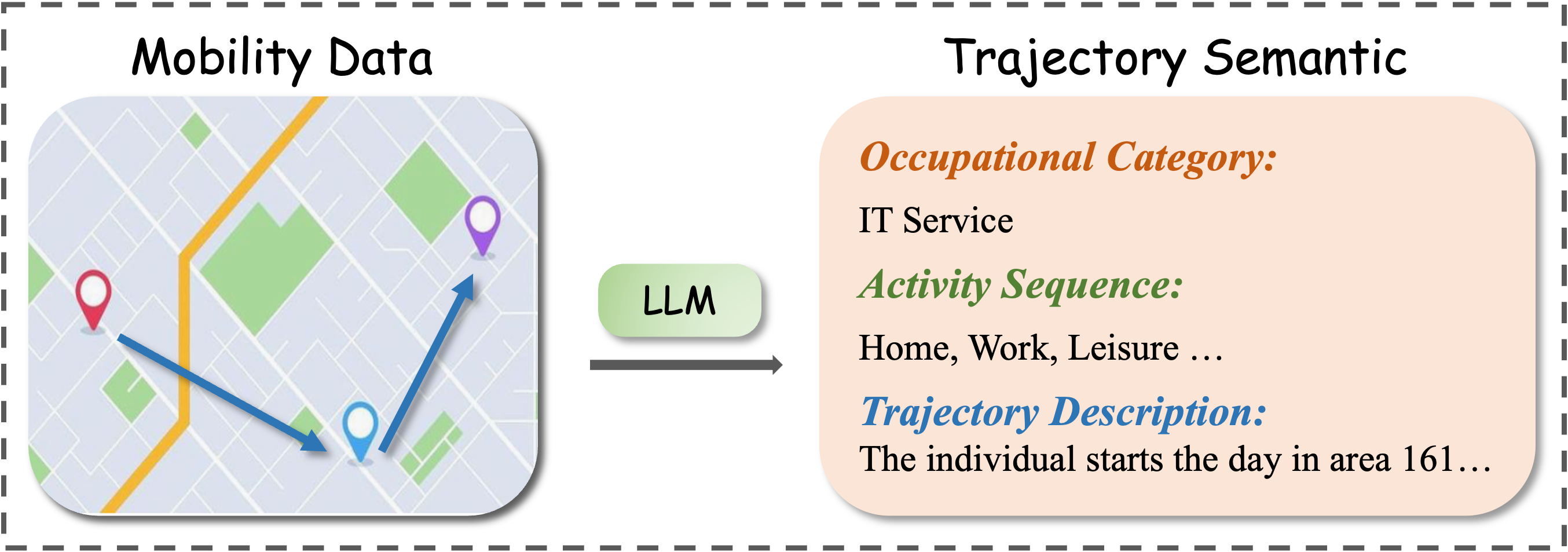
Understanding human mobility patterns is essential for various applications, from urban planning to public safety. The individual trajectory such as mobile phone location data, while rich in spatio-temporal information, often lacks semantic detail, limiting its utility for in-depth mobility analysis. Existing methods can infer basic routine activity sequences from this data, lacking depth in understanding complex human behaviors and users' characteristics. Additionally, they struggle with the dependency on hard-to-obtain auxiliary datasets like travel surveys. To address these limitations, this paper defines trajectory semantic inference through three key dimensions: user occupation category, activity sequence, and trajectory description, and proposes the Trajectory Semantic Inference with Large Language Models (TSI-LLM) framework to leverage LLMs infer trajectory semantics comprehensively and deeply. We adopt spatio-temporal attributes enhanced data formatting (STFormat) and design a context-inclusive prompt, enabling LLMs to more effectively interpret and infer the semantics of trajectory data. Experimental validation on real-world trajectory datasets demonstrates the efficacy of TSI-LLM in deciphering complex human mobility patterns. This study explores the potential of LLMs in enhancing the semantic analysis of trajectory data, paving the way for more sophisticated and accessible human mobility research.
5/31/2024