TrACT: A Training Dynamics Aware Contrastive Learning Framework for Long-tail Trajectory Prediction
2404.12538
0
0

Abstract
As a safety critical task, autonomous driving requires accurate predictions of road users' future trajectories for safe motion planning, particularly under challenging conditions. Yet, many recent deep learning methods suffer from a degraded performance on the challenging scenarios, mainly because these scenarios appear less frequently in the training data. To address such a long-tail issue, existing methods force challenging scenarios closer together in the feature space during training to trigger information sharing among them for more robust learning. These methods, however, primarily rely on the motion patterns to characterize scenarios, omitting more informative contextual information, such as interactions and scene layout. We argue that exploiting such information not only improves prediction accuracy but also scene compliance of the generated trajectories. In this paper, we propose to incorporate richer training dynamics information into a prototypical contrastive learning framework. More specifically, we propose a two-stage process. First, we generate rich contextual features using a baseline encoder-decoder framework. These features are split into clusters based on the model's output errors, using the training dynamics information, and a prototype is computed within each cluster. Second, we retrain the model using the prototypes in a contrastive learning framework. We conduct empirical evaluations of our approach using two large-scale naturalistic datasets and show that our method achieves state-of-the-art performance by improving accuracy and scene compliance on the long-tail samples. Furthermore, we perform experiments on a subset of the clusters to highlight the additional benefit of our approach in reducing training bias.
Create account to get full access
Overview
- This research paper proposes a novel framework called TrACT (Training Dynamics Aware Contrastive Learning) for long-tail trajectory prediction.
- The key idea is to leverage the training dynamics of a contrastive learning model to improve its performance on long-tail trajectory samples.
- The approach aims to address the challenge of predicting trajectories for rare or unusual movements, which are often underrepresented in training data.
Plain English Explanation
Trajectory prediction is the task of forecasting the future movement of objects, such as cars or pedestrians, based on their current and past trajectories. This is an important problem in areas like autonomous vehicles and smart cities. However, predicting the trajectories of objects that move in rare or unusual ways can be challenging, as these types of movements are often underrepresented in the training data used to build prediction models.
The researchers behind this paper developed a new framework called TrACT (Training Dynamics Aware Contrastive Learning) to address this challenge. The key insight is that by understanding how the model learns during training, it's possible to improve its ability to predict long-tail trajectories - that is, trajectories that are uncommon or unusual.
The TrACT framework uses a contrastive learning approach, which means the model is trained to distinguish between positive examples (similar trajectories) and negative examples (dissimilar trajectories). The researchers discovered that the training dynamics of this contrastive learning process can provide valuable information about the model's strengths and weaknesses. By leveraging this insight, they were able to design a more effective training strategy that boosts the model's performance on long-tail trajectory samples.
Technical Explanation
The paper introduces the TrACT framework, which builds on the idea of contrastive learning for trajectory prediction. Contrastive learning aims to learn representations that can effectively distinguish between similar and dissimilar examples. In the context of trajectory prediction, the model is trained to differentiate between similar (positive) and dissimilar (negative) trajectory pairs.
The key innovation of TrACT is its use of the training dynamics of the contrastive learning process to guide the model's optimization. Specifically, the authors analyze how the model's ability to distinguish positive and negative trajectory pairs evolves during training. They observe that the model initially struggles more with long-tail trajectory samples, which are underrepresented in the training data. Over time, however, the model's performance on these long-tail samples gradually improves.
Based on this observation, the researchers design a training strategy that dynamically adjusts the contrastive loss to focus more on long-tail trajectory samples as training progresses. This helps the model learn more effective representations for these challenging examples, leading to improved overall performance on long-tail trajectory prediction.
The paper presents extensive experiments on several trajectory prediction benchmarks, including TraJEnglish, TrajPred, and Learning Distributions over Trajectories. The results demonstrate that TrACT outperforms state-of-the-art trajectory prediction models, particularly on long-tail trajectory samples.
Critical Analysis
The TrACT framework presents an interesting approach to addressing the challenge of long-tail trajectory prediction. By leveraging the training dynamics of the contrastive learning process, the researchers have developed a novel strategy that can effectively handle rare or unusual trajectory samples.
One potential limitation of the work is that it relies on the assumption that the training dynamics of the contrastive learning model can provide meaningful insights into its performance on long-tail trajectory samples. While the paper provides evidence to support this assumption, it would be valuable to further investigate the generalizability of this insight to other trajectory prediction tasks and datasets.
Additionally, the paper does not explore the impact of different contrastive learning objectives or network architectures on the effectiveness of the TrACT framework. It would be interesting to see how the approach might perform with alternative contrastive learning formulations or model designs, as these factors could potentially influence the training dynamics and the resulting performance on long-tail trajectories.
Finally, the paper would benefit from a more thorough discussion of the potential real-world implications of the TrACT framework. While the improved performance on long-tail trajectories is a valuable contribution, the authors could delve deeper into how this might translate to practical applications in areas like autonomous navigation or traffic modeling.
Conclusion
The TrACT framework proposed in this paper represents an innovative approach to addressing the challenge of long-tail trajectory prediction. By leveraging the training dynamics of a contrastive learning model, the researchers have developed a strategy that can effectively handle rare or unusual trajectory samples, which are often underrepresented in training data.
The results of the paper demonstrate the effectiveness of the TrACT framework, with significant performance improvements over state-of-the-art trajectory prediction models, particularly on long-tail trajectory samples. This work has the potential to contribute to the advancement of trajectory prediction systems, which are essential for a wide range of applications, from autonomous vehicles to smart city planning.
While the paper raises some interesting questions and avenues for further research, the TrACT framework represents an important step forward in the field of long-tail trajectory prediction, and its insights may inspire future work in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
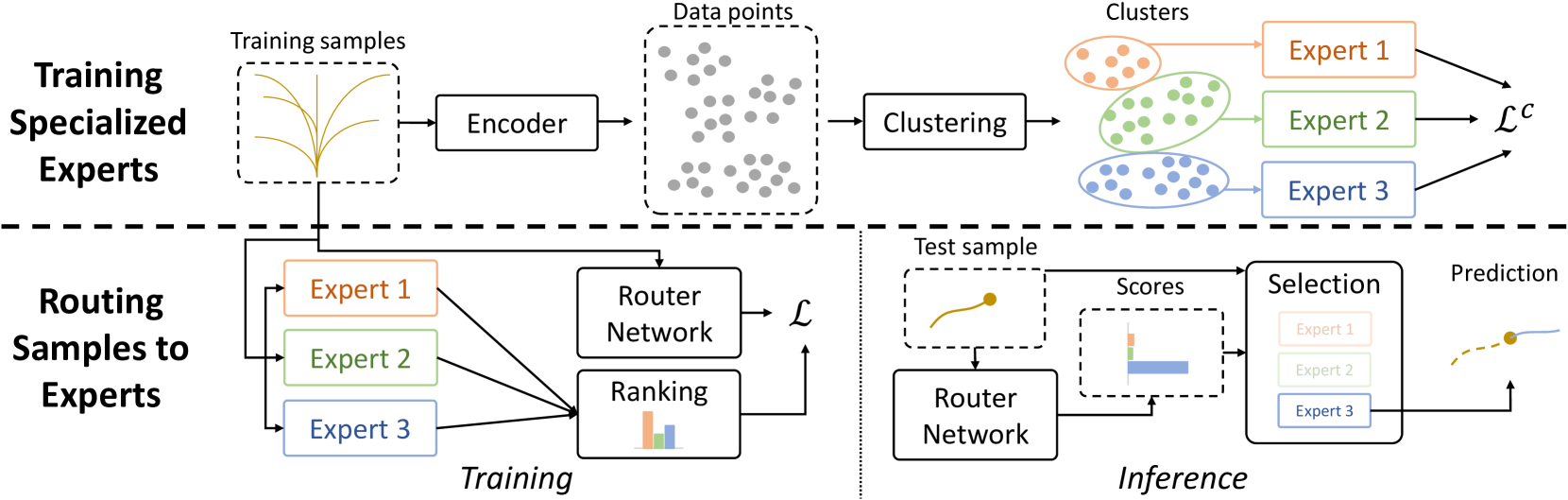
AMEND: A Mixture of Experts Framework for Long-tailed Trajectory Prediction
Ray Coden Mercurius, Ehsan Ahmadi, Soheil Mohamad Alizadeh Shabestary, Amir Rasouli
0
0
Accurate prediction of pedestrians' future motions is critical for intelligent driving systems. Developing models for this task requires rich datasets containing diverse sets of samples. However, the existing naturalistic trajectory prediction datasets are generally imbalanced in favor of simpler samples and lack challenging scenarios. Such a long-tail effect causes prediction models to underperform on the tail portion of the data distribution containing safety-critical scenarios. Previous methods tackle the long-tail problem using methods such as contrastive learning and class-conditioned hypernetworks. These approaches, however, are not modular and cannot be applied to many machine learning architectures. In this work, we propose a modular model-agnostic framework for trajectory prediction that leverages a specialized mixture of experts. In our approach, each expert is trained with a specialized skill with respect to a particular part of the data. To produce predictions, we utilise a router network that selects the best expert by generating relative confidence scores. We conduct experimentation on common pedestrian trajectory prediction datasets and show that our method improves performance on long-tail scenarios. We further conduct ablation studies to highlight the contribution of different proposed components.
4/30/2024
Transfer Learning Study of Motion Transformer-based Trajectory Predictions
Lars Ullrich, Alex McMaster, Knut Graichen
0
0
Trajectory planning in autonomous driving is highly dependent on predicting the emergent behavior of other road users. Learning-based methods are currently showing impressive results in simulation-based challenges, with transformer-based architectures technologically leading the way. Ultimately, however, predictions are needed in the real world. In addition to the shifts from simulation to the real world, many vehicle- and country-specific shifts, i.e. differences in sensor systems, fusion and perception algorithms as well as traffic rules and laws, are on the agenda. Since models that can cover all system setups and design domains at once are not yet foreseeable, model adaptation plays a central role. Therefore, a simulation-based study on transfer learning techniques is conducted on basis of a transformer-based model. Furthermore, the study aims to provide insights into possible trade-offs between computational time and performance to support effective transfers into the real world.
4/15/2024
🔮
Traj-LLM: A New Exploration for Empowering Trajectory Prediction with Pre-trained Large Language Models
Zhengxing Lan, Hongbo Li, Lingshan Liu, Bo Fan, Yisheng Lv, Yilong Ren, Zhiyong Cui
0
0
Predicting the future trajectories of dynamic traffic actors is a cornerstone task in autonomous driving. Though existing notable efforts have resulted in impressive performance improvements, a gap persists in scene cognitive and understanding of the complex traffic semantics. This paper proposes Traj-LLM, the first to investigate the potential of using Large Language Models (LLMs) without explicit prompt engineering to generate future motion from agents' past/observed trajectories and scene semantics. Traj-LLM starts with sparse context joint coding to dissect the agent and scene features into a form that LLMs understand. On this basis, we innovatively explore LLMs' powerful comprehension abilities to capture a spectrum of high-level scene knowledge and interactive information. Emulating the human-like lane focus cognitive function and enhancing Traj-LLM's scene comprehension, we introduce lane-aware probabilistic learning powered by the pioneering Mamba module. Finally, a multi-modal Laplace decoder is designed to achieve scene-compliant multi-modal predictions. Extensive experiments manifest that Traj-LLM, fortified by LLMs' strong prior knowledge and understanding prowess, together with lane-aware probability learning, outstrips state-of-the-art methods across evaluation metrics. Moreover, the few-shot analysis further substantiates Traj-LLM's performance, wherein with just 50% of the dataset, it outperforms the majority of benchmarks relying on complete data utilization. This study explores equipping the trajectory prediction task with advanced capabilities inherent in LLMs, furnishing a more universal and adaptable solution for forecasting agent motion in a new way.
5/9/2024
Trajeglish: Traffic Modeling as Next-Token Prediction
Jonah Philion, Xue Bin Peng, Sanja Fidler
0
0
A longstanding challenge for self-driving development is simulating dynamic driving scenarios seeded from recorded driving logs. In pursuit of this functionality, we apply tools from discrete sequence modeling to model how vehicles, pedestrians and cyclists interact in driving scenarios. Using a simple data-driven tokenization scheme, we discretize trajectories to centimeter-level resolution using a small vocabulary. We then model the multi-agent sequence of discrete motion tokens with a GPT-like encoder-decoder that is autoregressive in time and takes into account intra-timestep interaction between agents. Scenarios sampled from our model exhibit state-of-the-art realism; our model tops the Waymo Sim Agents Benchmark, surpassing prior work along the realism meta metric by 3.3% and along the interaction metric by 9.9%. We ablate our modeling choices in full autonomy and partial autonomy settings, and show that the representations learned by our model can quickly be adapted to improve performance on nuScenes. We additionally evaluate the scalability of our model with respect to parameter count and dataset size, and use density estimates from our model to quantify the saliency of context length and intra-timestep interaction for the traffic modeling task.
4/16/2024