Uncertainty-aware Active Learning of NeRF-based Object Models for Robot Manipulators using Visual and Re-orientation Actions
2404.01812
0
0
Abstract
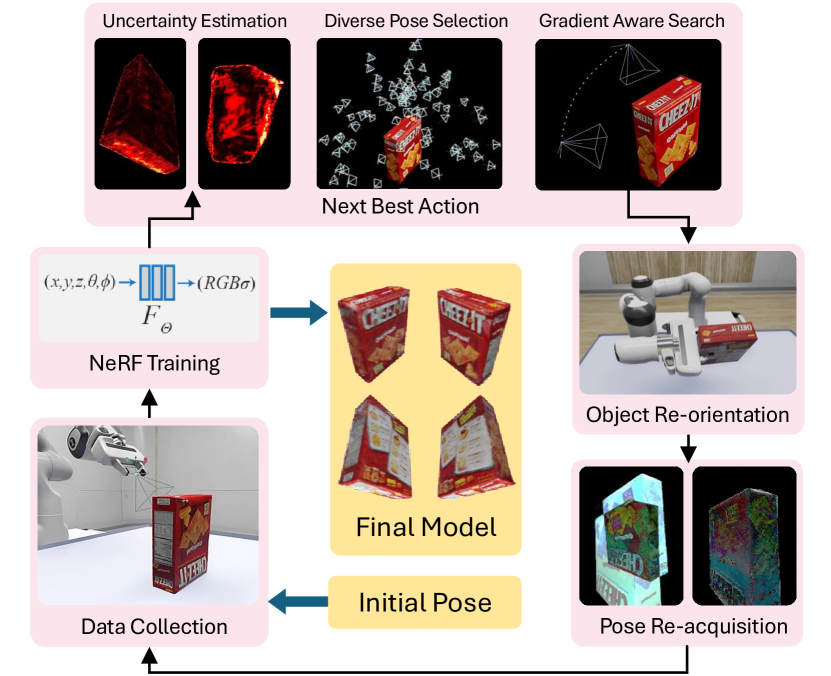
Manipulating unseen objects is challenging without a 3D representation, as objects generally have occluded surfaces. This requires physical interaction with objects to build their internal representations. This paper presents an approach that enables a robot to rapidly learn the complete 3D model of a given object for manipulation in unfamiliar orientations. We use an ensemble of partially constructed NeRF models to quantify model uncertainty to determine the next action (a visual or re-orientation action) by optimizing informativeness and feasibility. Further, our approach determines when and how to grasp and re-orient an object given its partial NeRF model and re-estimates the object pose to rectify misalignments introduced during the interaction. Experiments with a simulated Franka Emika Robot Manipulator operating in a tabletop environment with benchmark objects demonstrate an improvement of (i) 14% in visual reconstruction quality (PSNR), (ii) 20% in the geometric/depth reconstruction of the object surface (F-score) and (iii) 71% in the task success rate of manipulating objects a-priori unseen orientations/stable configurations in the scene; over current methods. The project page can be found here: https://actnerf.github.io.
Get summaries of the top AI research delivered straight to your inbox:
Overview
- This paper presents a method for actively learning 3D object models using a robot manipulator and a neural radiance field (NeRF) representation.
- The approach combines visual observations and controlled re-orientation of the object to efficiently build accurate 3D models while quantifying uncertainty.
- The authors demonstrate this technique on several household objects, showing it can learn high-quality models with fewer observations compared to passive learning.
Plain English Explanation
The researchers have developed a way for a robot to quickly and accurately learn 3D models of everyday objects it encounters. Traditional methods for creating 3D models often require capturing many images of an object from different angles, which can be time-consuming.
This new approach allows the robot to be more strategic about which views it captures. The robot uses a technique called neural radiance fields (NeRF) to build a 3D representation of the object. NeRF can create detailed 3D models from just a handful of images.
To make the process even more efficient, the robot actively decides which views it should capture next. It does this by evaluating how uncertain it is about different parts of the 3D model. The robot can then choose to re-orient the object and capture additional views of the areas it's most uncertain about. This helps it fill in the gaps in the 3D model quickly.
The researchers tested this active learning approach on several common household objects. They found the robot could create high-quality 3D models using far fewer images compared to a more passive approach. This could be very useful for robots that need to interact with and manipulate a wide variety of objects in the real world.
Technical Explanation
The paper presents a framework for uncertainty-aware active learning of 3D object models using a robot manipulator and NeRF. The key components are:
-
NeRF representation: The 3D object is modeled using a neural radiance field, which can efficiently capture high-fidelity geometry and appearance from sparse RGB-D observations.
-
Active learning: The robot strategically selects the next best views to capture by quantifying the uncertainty in the current NeRF model. This is achieved by computing the variance in NeRF's density and color predictions.
-
Visual and re-orientation actions: The robot can perform both visual observations of the object as well as controlled re-orientations to gain new perspectives and reduce uncertainty.
-
Iterative learning: The process of capturing observations, updating the NeRF model, and selecting the next best action is repeated in an iterative manner until a convergence criterion is met.
The authors evaluate this approach on a set of household objects and show it can learn accurate 3D models using significantly fewer observations compared to passive learning. They also analyze the contribution of the re-orientation actions in improving model quality.
Critical Analysis
The paper presents a compelling approach for efficiently learning 3D object models using active perception. The key strength is the combination of the NeRF representation, which can capture high-fidelity details from sparse data, with an active learning strategy that intelligently selects the most informative views.
One limitation mentioned by the authors is that the current implementation assumes the object remains static during the learning process. In real-world scenarios, objects may move or deform, which would require extensions to handle dynamic scenes.
Additionally, the paper does not extensively explore the generalization capabilities of the learned NeRF models. It would be insightful to understand how well these models transfer to new instances of the same object categories or handle occlusions and partial observations.
Further research could also investigate the scalability of this approach to larger and more diverse object sets, as well as its integration with higher-level reasoning for practical robotic manipulation tasks.
Conclusion
This work presents a promising step towards enabling robots to quickly and accurately build 3D models of the objects they encounter in the real world. By actively selecting the most informative views and leveraging the efficiency of NeRF, the proposed framework can learn high-quality object representations with fewer observations compared to passive approaches.
This has the potential to significantly improve a robot's ability to understand and interact with a wide variety of objects, which is a crucial capability for many real-world applications, such as household assistance, manufacturing, and search and rescue operations.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤿
Unknown Object Grasping for Assistive Robotics
Elle Miller, Maximilian Durner, Matthias Humt, Gabriel Quere, Wout Boerdijk, Ashok M. Sundaram, Freek Stulp, Jorn Vogel
0
0
We propose a novel pipeline for unknown object grasping in shared robotic autonomy scenarios. State-of-the-art methods for fully autonomous scenarios are typically learning-based approaches optimised for a specific end-effector, that generate grasp poses directly from sensor input. In the domain of assistive robotics, we seek instead to utilise the user's cognitive abilities for enhanced satisfaction, grasping performance, and alignment with their high level task-specific goals. Given a pair of stereo images, we perform unknown object instance segmentation and generate a 3D reconstruction of the object of interest. In shared control, the user then guides the robot end-effector across a virtual hemisphere centered around the object to their desired approach direction. A physics-based grasp planner finds the most stable local grasp on the reconstruction, and finally the user is guided by shared control to this grasp. In experiments on the DLR EDAN platform, we report a grasp success rate of 87% for 10 unknown objects, and demonstrate the method's capability to grasp objects in structured clutter and from shelves.
5/7/2024
🎯
Part-Guided 3D RL for Sim2Real Articulated Object Manipulation
Pengwei Xie, Rui Chen, Siang Chen, Yuzhe Qin, Fanbo Xiang, Tianyu Sun, Jing Xu, Guijin Wang, Hao Su
0
0
Manipulating unseen articulated objects through visual feedback is a critical but challenging task for real robots. Existing learning-based solutions mainly focus on visual affordance learning or other pre-trained visual models to guide manipulation policies, which face challenges for novel instances in real-world scenarios. In this paper, we propose a novel part-guided 3D RL framework, which can learn to manipulate articulated objects without demonstrations. We combine the strengths of 2D segmentation and 3D RL to improve the efficiency of RL policy training. To improve the stability of the policy on real robots, we design a Frame-consistent Uncertainty-aware Sampling (FUS) strategy to get a condensed and hierarchical 3D representation. In addition, a single versatile RL policy can be trained on multiple articulated object manipulation tasks simultaneously in simulation and shows great generalizability to novel categories and instances. Experimental results demonstrate the effectiveness of our framework in both simulation and real-world settings. Our code is available at https://github.com/THU-VCLab/Part-Guided-3D-RL-for-Sim2Real-Articulated-Object-Manipulation.
4/29/2024

Knowledge NeRF: Few-shot Novel View Synthesis for Dynamic Articulated Objects
Wenxiao Cai, Xinyue Lei, Xinyu He, Junming Leo Chen, Yangang Wang
0
0
We present Knowledge NeRF to synthesize novel views for dynamic scenes. Reconstructing dynamic 3D scenes from few sparse views and rendering them from arbitrary perspectives is a challenging problem with applications in various domains. Previous dynamic NeRF methods learn the deformation of articulated objects from monocular videos. However, qualities of their reconstructed scenes are limited. To clearly reconstruct dynamic scenes, we propose a new framework by considering two frames at a time.We pretrain a NeRF model for an articulated object.When articulated objects moves, Knowledge NeRF learns to generate novel views at the new state by incorporating past knowledge in the pretrained NeRF model with minimal observations in the present state. We propose a projection module to adapt NeRF for dynamic scenes, learning the correspondence between pretrained knowledge base and current states. Experimental results demonstrate the effectiveness of our method in reconstructing dynamic 3D scenes with 5 input images in one state. Knowledge NeRF is a new pipeline and promising solution for novel view synthesis in dynamic articulated objects. The data and implementation are publicly available at https://github.com/RussRobin/Knowledge_NeRF.
4/9/2024

Active Exploration in Bayesian Model-based Reinforcement Learning for Robot Manipulation
Carlos Plou, Ana C. Murillo, Ruben Martinez-Cantin
0
0
Efficiently tackling multiple tasks within complex environment, such as those found in robot manipulation, remains an ongoing challenge in robotics and an opportunity for data-driven solutions, such as reinforcement learning (RL). Model-based RL, by building a dynamic model of the robot, enables data reuse and transfer learning between tasks with the same robot and similar environment. Furthermore, data gathering in robotics is expensive and we must rely on data efficient approaches such as model-based RL, where policy learning is mostly conducted on cheaper simulations based on the learned model. Therefore, the quality of the model is fundamental for the performance of the posterior tasks. In this work, we focus on improving the quality of the model and maintaining the data efficiency by performing active learning of the dynamic model during a preliminary exploration phase based on maximize information gathering. We employ Bayesian neural network models to represent, in a probabilistic way, both the belief and information encoded in the dynamic model during exploration. With our presented strategies we manage to actively estimate the novelty of each transition, using this as the exploration reward. In this work, we compare several Bayesian inference methods for neural networks, some of which have never been used in a robotics context, and evaluate them in a realistic robot manipulation setup. Our experiments show the advantages of our Bayesian model-based RL approach, with similar quality in the results than relevant alternatives with much lower requirements regarding robot execution steps. Unlike related previous studies that focused the validation solely on toy problems, our research takes a step towards more realistic setups, tackling robotic arm end-tasks.
4/3/2024