Uncertainty-aware Human Mobility Modeling and Anomaly Detection

0
Sign in to get full access
Overview
- The paper proposes an uncertainty-aware model for human mobility prediction and anomaly detection.
- It uses a Gaussian mixture model (GMM) to capture the uncertainty in human mobility patterns.
- The model is designed to identify anomalies or unusual behavior in human movement data.
Plain English Explanation
The research paper focuses on modeling human mobility patterns and detecting anomalies in that data. The key idea is to use a statistical model called a Gaussian mixture model (GMM) to capture the uncertainty inherent in how people move around.
Typical approaches to modeling human mobility often assume a single, fixed pattern. However, in reality, people's movements can vary significantly from day to day or even within a single day. The GMM allows the model to represent this uncertainty by fitting multiple "clusters" or distributions to the data. This provides a more realistic representation of the complex, unpredictable nature of human movement.
With this uncertainty-aware model in place, the researchers can then identify anomalies or unusual movement patterns that deviate significantly from the learned mobility model. This could be useful for a variety of applications, such as monitoring human activities or detecting abnormal or suspicious behavior.
Technical Explanation
The paper introduces an uncertainty-aware human mobility model based on a Gaussian mixture model (GMM). The GMM is used to capture the inherent uncertainty in human movement patterns, where individuals may exhibit different behaviors at different times.
The model takes as input a set of historical trajectory data, which represents the movement of individuals over time and space. The GMM is then trained on this data to learn the underlying distribution of mobility patterns. The model consists of multiple Gaussian components, each representing a different cluster or mode of behavior within the data.
Once the GMM is trained, the researchers can use it to detect anomalies in new trajectory data. By evaluating the likelihood of each new data point under the learned GMM, they can identify observations that fall outside the normal range of behavior and flag them as potential anomalies.
The paper presents experiments on both synthetic and real-world mobility datasets, demonstrating the effectiveness of the uncertainty-aware model in predicting human movements and detecting anomalies compared to traditional approaches.
Critical Analysis
The paper presents a novel and promising approach to modeling human mobility patterns, but it also acknowledges several limitations and areas for future work.
One key limitation is that the GMM-based model assumes the underlying mobility patterns can be represented by a mixture of Gaussian distributions. In reality, human movement may follow more complex, non-Gaussian distributions, which could reduce the model's accuracy.
Additionally, the paper focuses on detecting anomalies based on individual trajectory data, but it does not consider the potential influence of contextual factors or social interactions on human mobility. Incorporating these elements could lead to more comprehensive and realistic anomaly detection.
Further research could also explore the interpretability of the learned GMM components, as understanding the underlying mobility patterns could provide valuable insights for various applications.
Conclusion
This research paper presents an uncertainty-aware model for human mobility prediction and anomaly detection. By using a Gaussian mixture model, the approach can capture the inherent variability in human movement patterns and identify unusual behaviors that deviate from the learned model.
The proposed method has the potential to be useful in a variety of applications, such as monitoring human activities, detecting abnormal or suspicious movement, and improving the predictability of human mobility. Further research could explore ways to enhance the model's flexibility and incorporate additional contextual factors to improve its accuracy and real-world applicability.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Uncertainty-aware Human Mobility Modeling and Anomaly Detection
Haomin Wen, Shurui Cao, Leman Akoglu
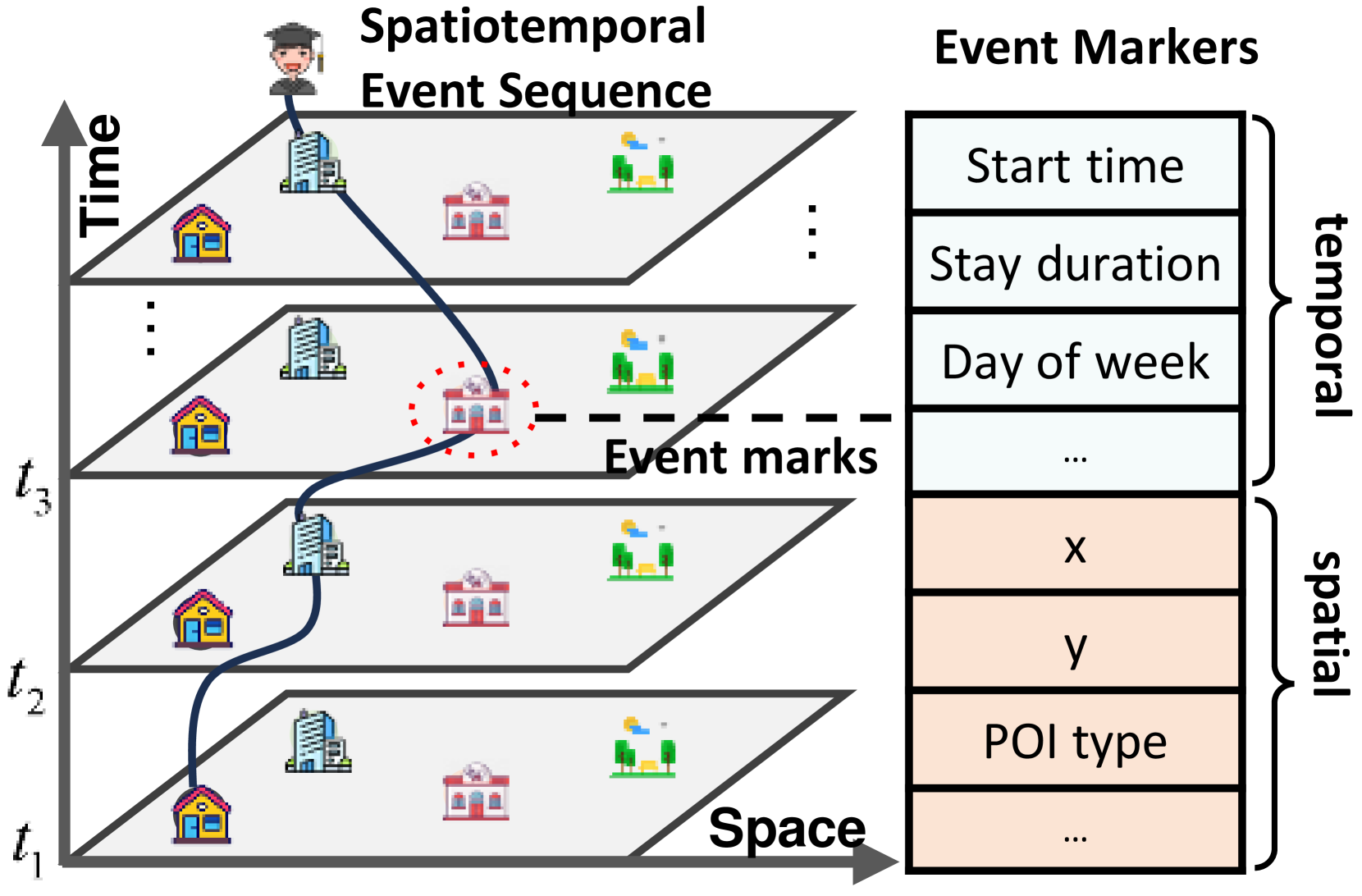
Given the GPS coordinates of a large collection of human agents over time, how can we model their mobility behavior toward effective anomaly detection (e.g. for bad-actor or malicious behavior detection) without any labeled data? Human mobility and trajectory modeling have been studied extensively with varying capacity to handle complex input, and performance-efficiency trade-offs. With the arrival of more expressive models in machine learning, we attempt to model GPS data as a sequence of stay-point events, each with a set of characterizing spatiotemporal features, and leverage modern sequence models such as Transformers for un/self-supervised training and inference. Notably, driven by the inherent stochasticity of certain individuals' behavior, we equip our model with aleatoric/data uncertainty estimation. In addition, to handle data sparsity of a large variety of behaviors, we incorporate epistemic/model uncertainty into our model. Together, aleatoric and epistemic uncertainty enable a robust loss and training dynamics, as well as uncertainty-aware decision making in anomaly scoring. Experiments on large expert-simulated datasets with tens of thousands of agents demonstrate the effectiveness of our model against both forecasting and anomaly detection baselines.
Read more10/3/2024

0
AgentMove: Predicting Human Mobility Anywhere Using Large Language Model based Agentic Framework
Jie Feng, Yuwei Du, Jie Zhao, Yong Li
Human mobility prediction plays a crucial role in various real-world applications. Although deep learning based models have shown promising results over the past decade, their reliance on extensive private mobility data for training and their inability to perform zero-shot predictions, have hindered further advancements. Recently, attempts have been made to apply large language models (LLMs) to mobility prediction task. However, their performance has been constrained by the absence of a systematic design of workflow. They directly generate the final output using LLMs, which limits the potential of LLMs to uncover complex mobility patterns and underestimates their extensive reserve of global geospatial knowledge. In this paper, we introduce AgentMove, a systematic agentic prediction framework to achieve generalized mobility prediction for any cities worldwide. In AgentMove, we first decompose the mobility prediction task into three sub-tasks and then design corresponding modules to complete these subtasks, including spatial-temporal memory for individual mobility pattern mining, world knowledge generator for modeling the effects of urban structure and collective knowledge extractor for capturing the shared patterns among population. Finally, we combine the results of three modules and conduct a reasoning step to generate the final predictions. Extensive experiments on mobility data from two sources in 12 cities demonstrate that AgentMove outperforms the best baseline more than 8% in various metrics and it shows robust predictions with various LLMs as base and also less geographical bias across cities. Codes and data can be found in https://github.com/tsinghua-fib-lab/AgentMove.
Read more8/27/2024

0
New!Entropy-Based Uncertainty Modeling for Trajectory Prediction in Autonomous Driving
Aron Distelzweig, Andreas Look, Eitan Kosman, Faris Janjov{s}, Jorg Wagner, Abhinav Valadaa
In autonomous driving, accurate motion prediction is essential for safe and efficient motion planning. To ensure safety, planners must rely on reliable uncertainty information about the predicted future behavior of surrounding agents, yet this aspect has received limited attention. This paper addresses the so-far neglected problem of uncertainty modeling in trajectory prediction. We adopt a holistic approach that focuses on uncertainty quantification, decomposition, and the influence of model composition. Our method is based on a theoretically grounded information-theoretic approach to measure uncertainty, allowing us to decompose total uncertainty into its aleatoric and epistemic components. We conduct extensive experiments on the nuScenes dataset to assess how different model architectures and configurations affect uncertainty quantification and model robustness.
Read more10/3/2024
🧠
0
Neural Collaborative Filtering to Detect Anomalies in Human Semantic Trajectories
Yueyang Liu, Lance Kennedy, Hossein Amiri, Andreas Zufle
Human trajectory anomaly detection has become increasingly important across a wide range of applications, including security surveillance and public health. However, existing trajectory anomaly detection methods are primarily focused on vehicle-level traffic, while human-level trajectory anomaly detection remains under-explored. Since human trajectory data is often very sparse, machine learning methods have become the preferred approach for identifying complex patterns. However, concerns regarding potential biases and the robustness of these models have intensified the demand for more transparent and explainable alternatives. In response to these challenges, our research focuses on developing a lightweight anomaly detection model specifically designed to detect anomalies in human trajectories. We propose a Neural Collaborative Filtering approach to model and predict normal mobility. Our method is designed to model users' daily patterns of life without requiring prior knowledge, thereby enhancing performance in scenarios where data is sparse or incomplete, such as in cold start situations. Our algorithm consists of two main modules. The first is the collaborative filtering module, which applies collaborative filtering to model normal mobility of individual humans to places of interest. The second is the neural module, responsible for interpreting the complex spatio-temporal relationships inherent in human trajectory data. To validate our approach, we conducted extensive experiments using simulated and real-world datasets comparing to numerous state-of-the-art trajectory anomaly detection approaches.
Read more9/30/2024