Uncertainty-Aware Visual-Inertial SLAM with Volumetric Occupancy Mapping

0

Sign in to get full access
Overview
- Uncertainty-aware visual-inertial SLAM with volumetric occupancy mapping
- Simultaneously optimizes robot poses and continuous occupancy maps
- Represents environment as a probabilistic 3D voxel grid
- Combines visual-inertial odometry with occupancy mapping
- Accounts for uncertainty in sensor measurements and environment
Plain English Explanation
The paper presents a method for Simultaneous Localization and Mapping (SLAM) that combines visual and inertial sensor data to track the robot's location and build a 3D map of the environment. Unlike traditional SLAM approaches that represent the environment discretely, this method uses a probabilistic 3D voxel grid to model the environment in a continuous manner.
The key innovation is the ability to account for uncertainty in both the robot's pose and the occupancy of the environment. This uncertainty-aware approach allows the system to better handle noisy sensor data and dynamic environments. By optimizing the robot's pose and the occupancy map simultaneously, the method can update the map as the robot moves, leading to a more accurate and consistent representation of the surroundings.
The visual-inertial odometry component tracks the robot's motion using camera and IMU data, while the occupancy mapping module builds a 3D grid of the environment's structure. By tightly coupling these two components, the system can leverage the strengths of each sensor modality to improve the overall SLAM performance.
Technical Explanation
The proposed method, called Uncertainty-Aware Visual-Inertial SLAM with Volumetric Occupancy Mapping, is designed to address the limitations of traditional SLAM approaches. It combines visual-inertial odometry with a probabilistic 3D occupancy mapping module to simultaneously optimize the robot's pose and the continuous occupancy map of the environment.
The visual-inertial odometry component uses a tightly-coupled approach to fuse data from the camera and IMU sensors, estimating the robot's 6-DoF pose. The occupancy mapping module represents the environment as a 3D voxel grid, where each voxel stores a probability of being occupied. This continuous representation allows for more accurate modeling of the environment compared to discrete approaches.
The key innovation is the uncertainty-aware optimization, which accounts for uncertainties in both the robot's pose and the occupancy of the environment. This is achieved by formulating the SLAM problem as a Maximum A Posteriori (MAP) estimation problem, where the objective function incorporates the uncertainties of the sensor measurements and the occupancy probabilities.
The optimization process jointly updates the robot's pose and the occupancy map, allowing the system to adapt to changes in the environment and provide a more accurate and consistent representation. The authors demonstrate the effectiveness of their approach through extensive experiments in both simulated and real-world scenarios, showing improved performance compared to state-of-the-art SLAM methods.
Critical Analysis
The paper presents a well-designed and thorough approach to uncertainty-aware visual-inertial SLAM with volumetric occupancy mapping. The authors have addressed several limitations of traditional SLAM methods by incorporating a continuous probabilistic representation of the environment and tightly coupling the visual-inertial odometry and occupancy mapping components.
One potential limitation of the approach is the computational complexity, as the simultaneous optimization of the robot's pose and the occupancy map can be computationally intensive, especially in large-scale environments. The authors acknowledge this and suggest that further research on efficient optimization algorithms or parallelization techniques could help address this issue.
Additionally, the paper does not provide a detailed analysis of the algorithm's robustness to dynamic environments or its ability to handle loop closures. These are important aspects of SLAM systems that could be further investigated in future work.
Despite these minor limitations, the overall contribution of the paper is significant, as it demonstrates the importance of considering uncertainty in SLAM systems and the benefits of a continuous probabilistic representation of the environment. The authors have also provided valuable insights into the tight coupling of visual-inertial odometry and occupancy mapping, which can inform the development of more advanced SLAM algorithms.
Conclusion
The Uncertainty-Aware Visual-Inertial SLAM with Volumetric Occupancy Mapping approach presented in this paper offers a significant advancement in the field of SLAM. By incorporating a continuous probabilistic representation of the environment and accounting for uncertainties in both the robot's pose and the occupancy map, the system can provide a more accurate and consistent representation of the surroundings.
The tight coupling of visual-inertial odometry and occupancy mapping allows the system to leverage the strengths of each sensor modality, leading to improved SLAM performance. This technology has important applications in areas such as autonomous navigation, augmented reality, and robotic exploration, where accurate and reliable environment modeling is crucial.
While the computational complexity of the approach may require further optimization, the core ideas presented in this paper demonstrate the importance of uncertainty-aware SLAM and the benefits of a continuous probabilistic representation of the environment. As the field of SLAM continues to evolve, the insights and innovations from this work will likely inspire and inform the development of even more advanced and capable SLAM systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Uncertainty-Aware Visual-Inertial SLAM with Volumetric Occupancy Mapping
Jaehyung Jung, Simon Boche, Sebastian Barbas Laina, Stefan Leutenegger
We propose visual-inertial simultaneous localization and mapping that tightly couples sparse reprojection errors, inertial measurement unit pre-integrals, and relative pose factors with dense volumetric occupancy mapping. Hereby depth predictions from a deep neural network are fused in a fully probabilistic manner. Specifically, our method is rigorously uncertainty-aware: first, we use depth and uncertainty predictions from a deep network not only from the robot's stereo rig, but we further probabilistically fuse motion stereo that provides depth information across a range of baselines, therefore drastically increasing mapping accuracy. Next, predicted and fused depth uncertainty propagates not only into occupancy probabilities but also into alignment factors between generated dense submaps that enter the probabilistic nonlinear least squares estimator. This submap representation offers globally consistent geometry at scale. Our method is thoroughly evaluated in two benchmark datasets, resulting in localization and mapping accuracy that exceeds the state of the art, while simultaneously offering volumetric occupancy directly usable for downstream robotic planning and control in real-time.
Read more9/19/2024

0
Occupancy-SLAM: Simultaneously Optimizing Robot Poses and Continuous Occupancy Map
Liang Zhao, Yingyu Wang, Shoudong Huang
In this paper, we propose an optimization based SLAM approach to simultaneously optimize the robot trajectory and the occupancy map using 2D laser scans (and odometry) information. The key novelty is that the robot poses and the occupancy map are optimized together, which is significantly different from existing occupancy mapping strategies where the robot poses need to be obtained first before the map can be estimated. In our formulation, the map is represented as a continuous occupancy map where each 2D point in the environment has a corresponding evidence value. The Occupancy-SLAM problem is formulated as an optimization problem where the variables include all the robot poses and the occupancy values at the selected discrete grid cell nodes. We propose a variation of Gauss-Newton method to solve this new formulated problem, obtaining the optimized occupancy map and robot trajectory together with their uncertainties. Our algorithm is an offline approach since it is based on batch optimization and the number of variables involved is large. Evaluations using simulations and publicly available practical 2D laser datasets demonstrate that the proposed approach can estimate the maps and robot trajectories more accurately than the state-of-the-art techniques, when a relatively accurate initial guess is provided to our algorithm. The video shows the convergence process of the proposed Occupancy-SLAM and comparison of results to Cartographer can be found at url{https://youtu.be/4oLyVEUC4iY}.
Read more5/20/2024

0
Co-Occ: Coupling Explicit Feature Fusion with Volume Rendering Regularization for Multi-Modal 3D Semantic Occupancy Prediction
Jingyi Pan, Zipeng Wang, Lin Wang
3D semantic occupancy prediction is a pivotal task in the field of autonomous driving. Recent approaches have made great advances in 3D semantic occupancy predictions on a single modality. However, multi-modal semantic occupancy prediction approaches have encountered difficulties in dealing with the modality heterogeneity, modality misalignment, and insufficient modality interactions that arise during the fusion of different modalities data, which may result in the loss of important geometric and semantic information. This letter presents a novel multi-modal, i.e., LiDAR-camera 3D semantic occupancy prediction framework, dubbed Co-Occ, which couples explicit LiDAR-camera feature fusion with implicit volume rendering regularization. The key insight is that volume rendering in the feature space can proficiently bridge the gap between 3D LiDAR sweeps and 2D images while serving as a physical regularization to enhance LiDAR-camera fused volumetric representation. Specifically, we first propose a Geometric- and Semantic-aware Fusion (GSFusion) module to explicitly enhance LiDAR features by incorporating neighboring camera features through a K-nearest neighbors (KNN) search. Then, we employ volume rendering to project the fused feature back to the image planes for reconstructing color and depth maps. These maps are then supervised by input images from the camera and depth estimations derived from LiDAR, respectively. Extensive experiments on the popular nuScenes and SemanticKITTI benchmarks verify the effectiveness of our Co-Occ for 3D semantic occupancy prediction. The project page is available at https://rorisis.github.io/Co-Occ_project-page/.
Read more5/24/2024
0
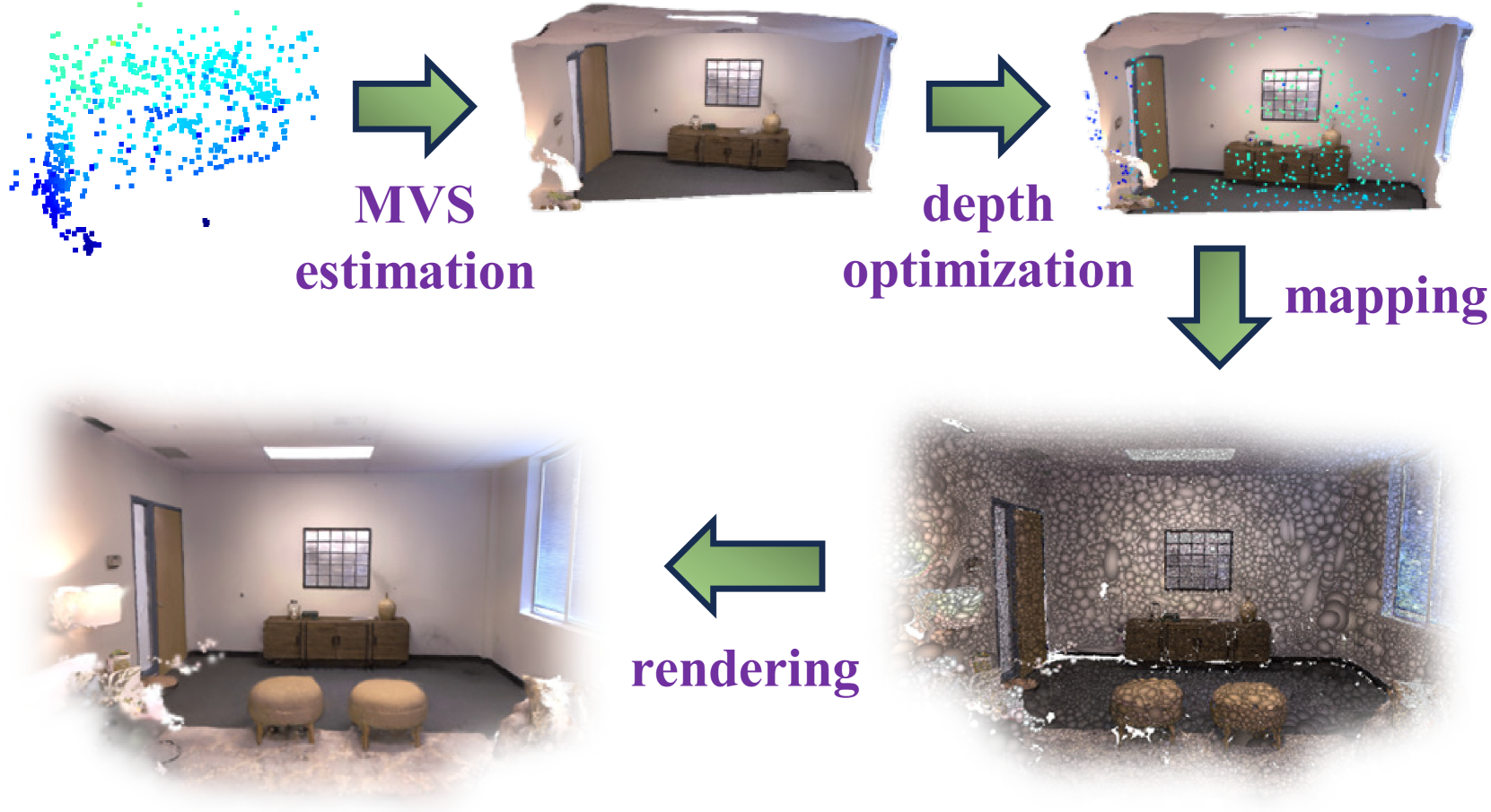
MGS-SLAM: Monocular Sparse Tracking and Gaussian Mapping with Depth Smooth Regularization
Pengcheng Zhu, Yaoming Zhuang, Baoquan Chen, Li Li, Chengdong Wu, Zhanlin Liu
This letter introduces a novel framework for dense Visual Simultaneous Localization and Mapping (VSLAM) based on Gaussian Splatting. Recently, SLAM based on Gaussian Splatting has shown promising results. However, in monocular scenarios, the Gaussian maps reconstructed lack geometric accuracy and exhibit weaker tracking capability. To address these limitations, we jointly optimize sparse visual odometry tracking and 3D Gaussian Splatting scene representation for the first time. We obtain depth maps on visual odometry keyframe windows using a fast Multi-View Stereo (MVS) network for the geometric supervision of Gaussian maps. Furthermore, we propose a depth smooth loss and Sparse-Dense Adjustment Ring (SDAR) to reduce the negative effect of estimated depth maps and preserve the consistency in scale between the visual odometry and Gaussian maps. We have evaluated our system across various synthetic and real-world datasets. The accuracy of our pose estimation surpasses existing methods and achieves state-of-the-art. Additionally, it outperforms previous monocular methods in terms of novel view synthesis and geometric reconstruction fidelities.
Read more9/11/2024