Real-time 3D semantic occupancy prediction for autonomous vehicles using memory-efficient sparse convolution
2403.08748
0
0
Abstract
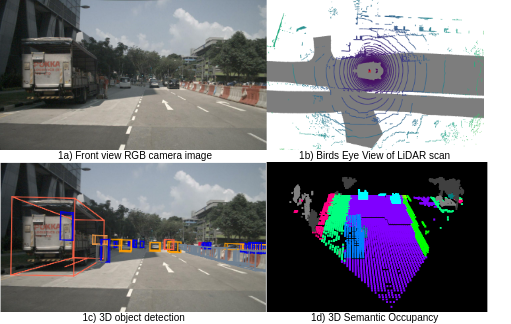
In autonomous vehicles, understanding the surrounding 3D environment of the ego vehicle in real-time is essential. A compact way to represent scenes while encoding geometric distances and semantic object information is via 3D semantic occupancy maps. State of the art 3D mapping methods leverage transformers with cross-attention mechanisms to elevate 2D vision-centric camera features into the 3D domain. However, these methods encounter significant challenges in real-time applications due to their high computational demands during inference. This limitation is particularly problematic in autonomous vehicles, where GPU resources must be shared with other tasks such as localization and planning. In this paper, we introduce an approach that extracts features from front-view 2D camera images and LiDAR scans, then employs a sparse convolution network (Minkowski Engine), for 3D semantic occupancy prediction. Given that outdoor scenes in autonomous driving scenarios are inherently sparse, the utilization of sparse convolution is particularly apt. By jointly solving the problems of 3D scene completion of sparse scenes and 3D semantic segmentation, we provide a more efficient learning framework suitable for real-time applications in autonomous vehicles. We also demonstrate competitive accuracy on the nuScenes dataset.
Create account to get full access
Overview
- This paper presents a memory-efficient sparse convolution approach for real-time 3D semantic occupancy prediction in autonomous vehicles.
- The proposed method uses a novel sparse convolutional neural network architecture to efficiently process 3D sensor data and predict the semantic occupancy of the environment around the vehicle.
- The authors demonstrate the effectiveness of their approach on a large-scale autonomous driving dataset, showing significant improvements in both accuracy and inference speed compared to existing methods.
Plain English Explanation
Autonomous vehicles need to be able to understand and predict the 3D environment around them in real-time to navigate safely. This paper introduces a new way to do this using a type of artificial intelligence called a neural network.
The key innovation is a memory-efficient sparse convolution approach that can efficiently process 3D sensor data from the vehicle's cameras and other sensors. This allows the system to quickly predict the semantic occupancy - what objects and obstacles are present and where they are located - without using a lot of computer memory.
The authors show this new approach performs better and runs faster than previous methods for this task. This is important for autonomous vehicles, which need to make decisions quickly to drive safely.
Overall, this research represents an important advance in the field of 3D perception for self-driving cars, bringing us closer to the goal of fully autonomous driving.
Technical Explanation
The core of this paper is a novel sparse convolutional neural network architecture designed for efficient 3D semantic occupancy prediction. The authors leverage recent advances in sparse convolution to develop a memory-efficient model that can operate in real-time.
Key aspects of the proposed approach include:
- Sparse Convolutions: The model uses sparse convolutions to efficiently process 3D sensor data, avoiding the memory and computational overhead of dense convolutions.
- Semantic Prediction: In addition to predicting the occupancy of the environment, the model also predicts the semantic labels (e.g. car, pedestrian, road) of the detected objects.
- Temporal Modeling: The system incorporates temporal information by taking into account past sensor data, allowing it to better predict future occupancy.
The authors evaluate their approach on a large-scale autonomous driving dataset, demonstrating significant improvements in both accuracy and inference speed compared to existing methods. This highlights the practical benefits of their memory-efficient sparse convolution technique for real-world autonomous vehicle applications.
Critical Analysis
The paper presents a well-designed and thoroughly evaluated approach to 3D semantic occupancy prediction for autonomous vehicles. The authors have clearly identified an important practical challenge and have made a meaningful technical contribution to address it.
One potential limitation is the reliance on a specific autonomous driving dataset for evaluation. While the dataset is large-scale and widely used, it would be valuable to see the approach tested on additional datasets or in real-world deployments to further validate its generalizability.
Additionally, the authors do not extensively discuss the potential limitations or failure modes of their approach. It would be helpful to understand the types of scenarios or sensor conditions where the model might struggle, and what steps could be taken to improve its robustness.
Overall, this research represents a significant advancement in the field of 3D perception for autonomous vehicles, and the authors have done an impressive job of balancing theoretical innovation with practical, real-world impact.
Conclusion
This paper introduces a novel memory-efficient sparse convolution approach for real-time 3D semantic occupancy prediction in autonomous vehicles. The authors have developed a highly efficient neural network architecture that can accurately and quickly process sensor data to understand the 3D environment around the vehicle.
The key contributions of this work include the sparse convolution technique, the incorporation of semantic and temporal information, and the demonstrated performance improvements over existing methods. These advances bring us closer to the realization of fully autonomous vehicles that can safely navigate complex environments.
As autonomous driving continues to evolve, this research represents an important step forward in the field of 3D perception and environmental understanding. The authors' approach could have broader implications for other real-time 3D applications beyond just self-driving cars.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Fully Sparse 3D Occupancy Prediction
Haisong Liu, Yang Chen, Haiguang Wang, Zetong Yang, Tianyu Li, Jia Zeng, Li Chen, Hongyang Li, Limin Wang
0
0
Occupancy prediction plays a pivotal role in autonomous driving. Previous methods typically construct dense 3D volumes, neglecting the inherent sparsity of the scene and suffering high computational costs. To bridge the gap, we introduce a novel fully sparse occupancy network, termed SparseOcc. SparseOcc initially reconstructs a sparse 3D representation from visual inputs and subsequently predicts semantic/instance occupancy from the 3D sparse representation by sparse queries. A mask-guided sparse sampling is designed to enable sparse queries to interact with 2D features in a fully sparse manner, thereby circumventing costly dense features or global attention. Additionally, we design a thoughtful ray-based evaluation metric, namely RayIoU, to solve the inconsistency penalty along depths raised in traditional voxel-level mIoU criteria. SparseOcc demonstrates its effectiveness by achieving a RayIoU of 34.0, while maintaining a real-time inference speed of 17.3 FPS, with 7 history frames inputs. By incorporating more preceding frames to 15, SparseOcc continuously improves its performance to 35.1 RayIoU without whistles and bells. Code is available at https://github.com/MCG-NJU/SparseOcc.
4/9/2024
SparseOcc: Rethinking Sparse Latent Representation for Vision-Based Semantic Occupancy Prediction
Pin Tang, Zhongdao Wang, Guoqing Wang, Jilai Zheng, Xiangxuan Ren, Bailan Feng, Chao Ma
0
0
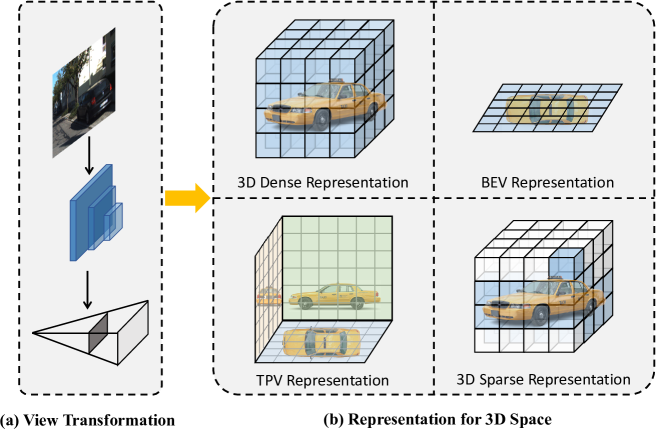
Vision-based perception for autonomous driving requires an explicit modeling of a 3D space, where 2D latent representations are mapped and subsequent 3D operators are applied. However, operating on dense latent spaces introduces a cubic time and space complexity, which limits scalability in terms of perception range or spatial resolution. Existing approaches compress the dense representation using projections like Bird's Eye View (BEV) or Tri-Perspective View (TPV). Although efficient, these projections result in information loss, especially for tasks like semantic occupancy prediction. To address this, we propose SparseOcc, an efficient occupancy network inspired by sparse point cloud processing. It utilizes a lossless sparse latent representation with three key innovations. Firstly, a 3D sparse diffuser performs latent completion using spatially decomposed 3D sparse convolutional kernels. Secondly, a feature pyramid and sparse interpolation enhance scales with information from others. Finally, the transformer head is redesigned as a sparse variant. SparseOcc achieves a remarkable 74.9% reduction on FLOPs over the dense baseline. Interestingly, it also improves accuracy, from 12.8% to 14.1% mIOU, which in part can be attributed to the sparse representation's ability to avoid hallucinations on empty voxels.
4/16/2024
🔮
Collaborative Semantic Occupancy Prediction with Hybrid Feature Fusion in Connected Automated Vehicles
Rui Song, Chenwei Liang, Hu Cao, Zhiran Yan, Walter Zimmer, Markus Gross, Andreas Festag, Alois Knoll
0
0
Collaborative perception in automated vehicles leverages the exchange of information between agents, aiming to elevate perception results. Previous camera-based collaborative 3D perception methods typically employ 3D bounding boxes or bird's eye views as representations of the environment. However, these approaches fall short in offering a comprehensive 3D environmental prediction. To bridge this gap, we introduce the first method for collaborative 3D semantic occupancy prediction. Particularly, it improves local 3D semantic occupancy predictions by hybrid fusion of (i) semantic and occupancy task features, and (ii) compressed orthogonal attention features shared between vehicles. Additionally, due to the lack of a collaborative perception dataset designed for semantic occupancy prediction, we augment a current collaborative perception dataset to include 3D collaborative semantic occupancy labels for a more robust evaluation. The experimental findings highlight that: (i) our collaborative semantic occupancy predictions excel above the results from single vehicles by over 30%, and (ii) models anchored on semantic occupancy outpace state-of-the-art collaborative 3D detection techniques in subsequent perception applications, showcasing enhanced accuracy and enriched semantic-awareness in road environments.
4/26/2024
🤯
Predicting Future Spatiotemporal Occupancy Grids with Semantics for Autonomous Driving
Maneekwan Toyungyernsub, Esen Yel, Jiachen Li, Mykel J. Kochenderfer
0
0
For autonomous vehicles to proactively plan safe trajectories and make informed decisions, they must be able to predict the future occupancy states of the local environment. However, common issues with occupancy prediction include predictions where moving objects vanish or become blurred, particularly at longer time horizons. We propose an environment prediction framework that incorporates environment semantics for future occupancy prediction. Our method first semantically segments the environment and uses this information along with the occupancy information to predict the spatiotemporal evolution of the environment. We validate our approach on the real-world Waymo Open Dataset. Compared to baseline methods, our model has higher prediction accuracy and is capable of maintaining moving object appearances in the predictions for longer prediction time horizons.
4/15/2024