Underwater robot guidance, navigation and control in fish net pens

0

Sign in to get full access
Overview
- Underwater robots are used in aquaculture facilities like fish net pens to assist with tasks like monitoring, feeding, and maintenance.
- Guidance, navigation, and control of these robots in the complex underwater environment of net pens is a key challenge.
- This paper explores techniques for enabling effective navigation and control of underwater robots in fish net pen environments.
Plain English Explanation
The paper discusses the use of underwater robots in aquaculture facilities like fish net pens. These robots can help with important tasks such as monitoring the health of the fish, delivering food, and maintaining the net pens. However, effectively navigating and controlling these robots in the underwater environment of the net pens is a significant challenge.
The researchers in this study looked at different approaches to help the robots move around the net pens accurately and respond appropriately to their surroundings. This included techniques for navigation, which is how the robots figure out where they are and how to get to where they need to go. The paper also covered control methods, which is how the robots adjust their movement and actions based on the conditions they encounter.
Overall, the goal was to develop ways to make the underwater robots more capable of operating reliably and efficiently within the complex fish net pen environment. This could lead to improvements in aquaculture practices and better monitoring and care of farmed fish.
Technical Explanation
The paper explores navigation techniques for underwater robots operating in fish net pen environments. This includes using a combination of sensors, mapping, and localization algorithms to allow the robots to understand their surroundings and plan effective routes.
The researchers also investigated control methods that enable the robots to dynamically adjust their movements and actions based on real-time feedback from their sensors. This helps the robots respond appropriately to factors like water currents, obstacles, and the presence of fish.
By advancing the capabilities of underwater robots in these areas, the goal is to enable more effective and reliable robotic systems that can assist with critical aquaculture tasks within the challenging net pen environment.
Critical Analysis
The paper provides a thorough technical overview of the navigation and control approaches explored, but does acknowledge some limitations. For example, the robustness of the system in the face of sensor failures or changing environmental conditions is not fully addressed.
Additionally, the paper does not delve deeply into the potential impact of these robotic systems on the welfare of the farmed fish. Further research may be needed to ensure the robots' presence and activities do not negatively affect the health and behavior of the fish population.
Overall, the research represents a valuable step forward in enhancing the capabilities of underwater robots for aquaculture applications. However, continued development and testing will be important to address remaining challenges and ensure these systems are deployed safely and effectively.
Conclusion
This paper presents techniques for improving the guidance, navigation, and control of underwater robots operating within the complex fish net pen environment. By advancing the robots' ability to understand their surroundings and dynamically adapt their movements, the researchers aim to enable more effective and reliable robotic assistance for critical aquaculture tasks.
While the technical details are promising, further research is needed to fully address potential limitations and ensure the responsible integration of these systems. Nevertheless, this work represents an important contribution towards enhancing robotic capabilities in aquaculture and supporting the sustainable production of farmed fish.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Underwater robot guidance, navigation and control in fish net pens
Sveinung Johan Ohrem
Aquaculture robotics is receiving increased attention and is subject to unique challenges and opportunities for research and development. Guidance, navigation and control are all important aspects for realizing aquaculture robotics solutions that can greatly benefit the industry in the future. Sensor technologies, navigation methods, motion planners and state control all have a role to play, and this paper introduces some technologies and methods that are currently being applied in research and industry before providing some examples of challenges that can be targeted in the future.
Read more9/17/2024

0
Aquaculture field robotics: Applications, lessons learned and future prospects
Herman B. Amundsen, Marios Xanthidis, Martin F{o}re, Sveinung J. Ohrem, Eleni Kelasidi
Aquaculture is a big marine industry and contributes to securing global food demands. Underwater vehicles such as remotely operated vehicles (ROVs) are commonly used for inspection, maintenance, and intervention (IMR) tasks in fish farms. However, underwater vehicle operations in aquaculture face several unique and demanding challenges, such as navigation in dynamically changing environments with time-varying sealoads and poor hydroacoustic sensor capabilities, challenges yet to be properly addressed in research. This paper will present various endeavors to address these questions and improve the overall autonomy level in aquaculture robotics, with a focus on field experiments. We will also discuss lessons learned during field trials and potential future prospects in aquaculture robotics.
Read more4/22/2024

0
New!Learning Agile Swimming: An End-to-End Approach without CPGs
Xiaozhu Lin, Xiaopei Liu, Yang Wang
The pursuit of agile and efficient underwater robots, especially bio-mimetic robotic fish, has been impeded by challenges in creating motion controllers that are able to fully exploit their hydrodynamic capabilities. This paper addresses these challenges by introducing a novel, model-free, end-to-end control framework that leverages Deep Reinforcement Learning (DRL) to enable agile and energy-efficient swimming of robotic fish. Unlike existing methods that rely on predefined trigonometric swimming patterns like Central Pattern Generators (CPG), our approach directly outputs low-level actuator commands without strong constraint, enabling the robotic fish to learn agile swimming behaviors. In addition, by integrating a high-performance Computational Fluid Dynamics (CFD) simulator with innovative sim-to-real strategies, such as normalized density matching and servo response matching, the proposed framework significantly mitigates the sim-to-real gap, facilitating direct transfer of control policies to real-world environments without fine-tuning. Comparative experiments demonstrate that our method achieves faster swimming speeds, smaller turning radii, and reduced energy consumption compared to the conventional CPG-PID-based controllers. Furthermore, the proposed framework shows promise in addressing complex tasks in diverse scenario, paving the way for more effective deployment of robotic fish in real aquatic environments.
Read more9/17/2024
0
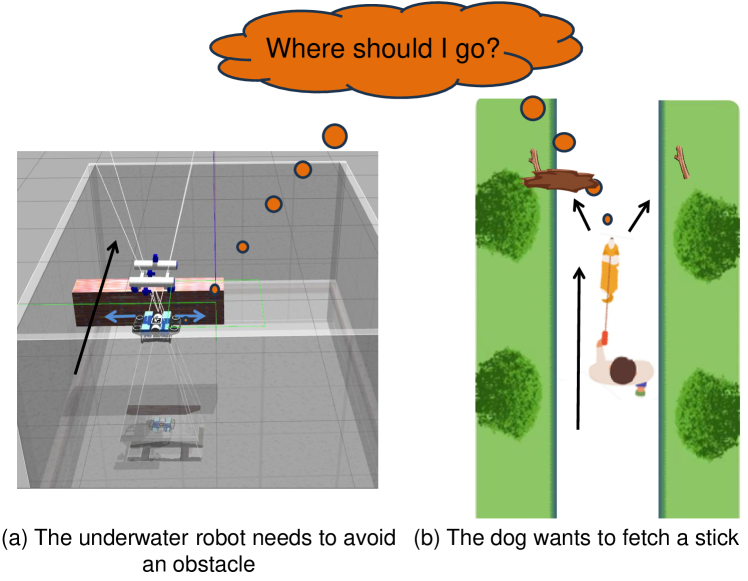
New!Fully Distributed Cooperative Multi-agent Underwater Obstacle Avoidance
Kanzhong Yao, Ognjen Marjanovic, Simon Watson
Navigation in cluttered underwater environments is challenging, especially when there are constraints on communication and self-localisation. Part of the fully distributed underwater navigation problem has been resolved by introducing multi-agent robot teams [1], however when the environment becomes cluttered, the problem remains unresolved. In this paper, we first studied the connection between everyday activity of dog walking and the cooperative underwater obstacle avoidance problem. Inspired by this analogy, we propose a novel dog walking paradigm and implement it in a multi-agent underwater system. Simulations were conducted across various scenarios, with performance benchmarked against traditional methods utilising Image-Based Visual Servoing in a multi-agent setup. Results indicate that our dog walking-inspired paradigm significantly enhances cooperative behavior among agents and outperforms the existing approach in navigating through obstacles.
Read more9/18/2024