Fully Distributed Cooperative Multi-agent Underwater Obstacle Avoidance

0
Sign in to get full access
Overview
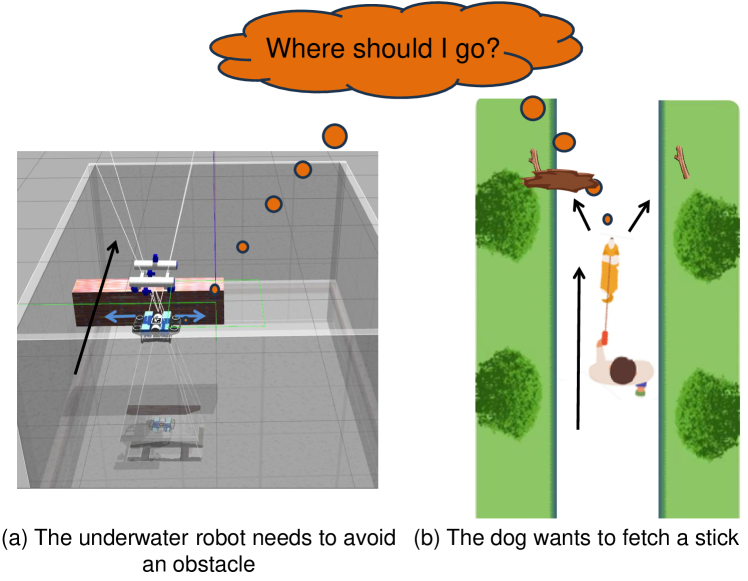
- This paper presents a fully distributed cooperative multi-agent underwater obstacle avoidance system under a "dog walking" paradigm.
- The proposed approach allows a team of autonomous underwater vehicles (AUVs) to navigate complex underwater environments while avoiding obstacles in a decentralized manner.
- The key contributions include a novel distributed control algorithm and a cooperative perception mechanism that enables the AUVs to share information and make coordinated decisions.
Plain English Explanation
The paper describes a new way for a team of underwater robots to work together to navigate through a complex underwater environment and avoid obstacles. Instead of having a central controller telling the robots what to do, each robot makes its own decisions about how to move and avoid obstacles.
The robots share information with each other about what they see in the environment, like how dogs walking together share information about their surroundings. This allows them to coordinate their movements and make sure they all safely avoid the obstacles.
The key innovations are a new algorithm that lets each robot independently decide how to move, and a way for the robots to share information with each other in a decentralized manner. This "dog walking" approach allows the team of robots to navigate through an underwater area full of obstacles without needing a central controller.
Technical Explanation
The paper introduces a fully distributed cooperative multi-agent underwater obstacle avoidance system that operates under a "dog walking" paradigm. In this paradigm, a team of autonomous underwater vehicles (AUVs) navigate complex underwater environments while cooperatively avoiding obstacles in a decentralized manner.
The proposed approach consists of two key components:
- A distributed control algorithm that allows each AUV to independently determine its own motion based on local sensing and information sharing with neighboring AUVs.
- A cooperative perception mechanism that enables the AUVs to share information about the environment and obstacles, allowing them to make coordinated decisions.
The distributed control algorithm uses a potential field-based method, where each AUV generates a local potential field that guides its motion. The AUVs share information about their individual potential fields, allowing them to coordinate their movements and avoid collisions.
The cooperative perception component enables the AUVs to build a shared understanding of the environment by exchanging sensor data and obstacle information. This allows the team to collectively perceive the obstacle field and plan their motions accordingly.
Through simulation experiments, the authors demonstrate the effectiveness of the proposed approach in enabling the AUV team to navigate complex underwater environments while avoiding obstacles in a fully distributed manner.
Critical Analysis
The paper presents a novel and compelling approach to the problem of cooperative multi-agent underwater obstacle avoidance. The "dog walking" paradigm is an interesting analogy that helps to convey the decentralized, collaborative nature of the proposed system.
One potential limitation of the research is the reliance on simulated experiments. While the authors demonstrate the effectiveness of their approach in simulation, it would be valuable to see how the system performs in real-world underwater environments, which may introduce additional challenges not captured in the simulations.
Additionally, the paper does not explore the scalability of the approach as the number of AUVs increases. It would be interesting to understand how the distributed control and cooperative perception mechanisms scale with larger teams of robots and more complex obstacle fields.
Finally, the paper does not discuss potential failure modes or edge cases that the system may encounter, such as sensor failures, communication breakdowns, or unexpected obstacle configurations. A more thorough examination of the system's robustness and resilience would strengthen the critical analysis.
Conclusion
This paper presents a novel fully distributed cooperative multi-agent underwater obstacle avoidance system that operates under a "dog walking" paradigm. The proposed approach enables a team of AUVs to navigate complex underwater environments while cooperatively avoiding obstacles in a decentralized manner, without the need for a central controller.
The key innovations include a distributed control algorithm and a cooperative perception mechanism that allow the AUVs to share information and make coordinated decisions. The simulation results demonstrate the effectiveness of the system, but further research is needed to assess its performance in real-world underwater scenarios and its scalability to larger teams of robots.
Overall, this work represents an important contribution to the field of cooperative multi-agent systems and underwater robotics, with potential applications in areas such as marine exploration, environmental monitoring, and disaster response.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Fully Distributed Cooperative Multi-agent Underwater Obstacle Avoidance
Kanzhong Yao, Ognjen Marjanovic, Simon Watson
Navigation in cluttered underwater environments is challenging, especially when there are constraints on communication and self-localisation. Part of the fully distributed underwater navigation problem has been resolved by introducing multi-agent robot teams [1], however when the environment becomes cluttered, the problem remains unresolved. In this paper, we first studied the connection between everyday activity of dog walking and the cooperative underwater obstacle avoidance problem. Inspired by this analogy, we propose a novel dog walking paradigm and implement it in a multi-agent underwater system. Simulations were conducted across various scenarios, with performance benchmarked against traditional methods utilising Image-Based Visual Servoing in a multi-agent setup. Results indicate that our dog walking-inspired paradigm significantly enhances cooperative behavior among agents and outperforms the existing approach in navigating through obstacles.
Read more9/18/2024

0
Multi-AUV Cooperative Underwater Multi-Target Tracking Based on Dynamic-Switching-enabled Multi-Agent Reinforcement Learning
Shengbo Wang, Chuan Lin, Guangjie Han, Shengchao Zhu, Zhixian Li, Zhenyu Wang
With the rapid development of underwater communication, sensing, automation, robot technologies, autonomous underwater vehicle (AUV) swarms are gradually becoming popular and have been widely promoted in ocean exploration and underwater tracking or surveillance, etc. However, the complex underwater environment poses significant challenges for AUV swarm-based accurate tracking for the underwater moving targets. In this paper, we aim at proposing a multi-AUV cooperative underwater multi-target tracking algorithm especially when the real underwater factors are taken into account.We first give normally modelling approach for the underwater sonar-based detection and the ocean current interference on the target tracking process.Then, we regard the AUV swarm as a underwater ad-hoc network and propose a novel Multi-Agent Reinforcement Learning (MARL) architecture towards the AUV swarm based on Software-Defined Networking (SDN).It enhances the flexibility and scalability of the AUV swarm through centralized management and distributed operations.Based on the proposed MARL architecture, we propose the dynamic-attention switching and dynamic-resampling switching mechanisms, to enhance the efficiency and accuracy of AUV swarm cooperation during task execution.Finally, based on a proposed AUV classification method, we propose an efficient cooperative tracking algorithm called ASMA.Evaluation results demonstrate that our proposed tracking algorithm can perform precise underwater multi-target tracking, comparing with many of recent research products in terms of convergence speed and tracking accuracy.
Read more4/24/2024

0
Virtual Elastic Tether: a New Approach for Multi-agent Navigation in Confined Aquatic Environments
Kanzhong Yao, Xueliang Cheng, Keir Groves, Barry Lennox, Ognjen Marjanovic, Simon Watson
Underwater navigation is a challenging area in the field of mobile robotics due to inherent constraints in self-localisation and communication in underwater environments. Some of these challenges can be mitigated by using collaborative multi-agent teams. However, when applied underwater, the robustness of traditional multi-agent collaborative control approaches is highly limited due to the unavailability of reliable measurements. In this paper, the concept of a Virtual Elastic Tether (VET) is introduced in the context of incomplete state measurements, which represents an innovative approach to underwater navigation in confined spaces. The concept of VET is formulated and validated using the Cooperative Aquatic Vehicle Exploration System (CAVES), which is a sim-to-real multi-agent aquatic robotic platform. Within this framework, a vision-based Autonomous Underwater Vehicle-Autonomous Surface Vehicle leader-follower formulation is developed. Experiments were conducted in both simulation and on a physical platform, benchmarked against a traditional Image-Based Visual Servoing approach. Results indicate that the formation of the baseline approach fails under discrete disturbances, when induced distances between the robots exceeds 0.6 m in simulation and 0.3 m in the real world. In contrast, the VET-enhanced system recovers to pre-perturbation distances within 5 seconds. Furthermore, results illustrate the successful navigation of VET-enhanced CAVES in a confined water pond where the baseline approach fails to perform adequately.
Read more8/16/2024
0
Path Planning for a Cooperative Navigation Aid Vehicle to Assist Multiple Agents Sequentially
Artur Wolek
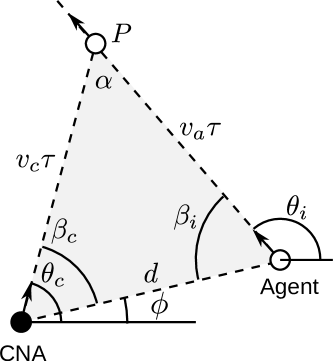
This paper considers planning a path for a single underwater cooperative navigation aid (CNA) vehicle to sequentially aid a set of N agents to minimize average navigation uncertainty. Both the CNA and agents are modeled as constant-velocity vehicles. The agents travel along known nominal trajectories and the CNA plans a path to sequentially intercept them. Navigation aiding is modeled by a scalar discrete time Kalman filter. During path planning, the CNA considers surfacing to reduce its own navigation uncertainty. A greedy planning algorithm is proposed that uses a heuristic to schedule agents to the CNA that is based on the optimal time-to-aid, the overall navigation uncertainty reduction, and the transit time. The approach is compared to an optimal (exhaustive enumeration) algorithm through a Monte Carlo experiment with randomized agent trajectories and initial navigation uncertainty.
Read more7/10/2024