Unified continuous-time q-learning for mean-field game and mean-field control problems

0
🔎
Sign in to get full access
Overview
- This paper investigates continuous-time q-learning in mean-field jump-diffusion models from the perspective of a representative agent.
- It introduces the integrated q-function in decoupled form (decoupled Iq-function) to address the challenge when the population distribution is not directly observable.
- The paper establishes the martingale characterization of the decoupled Iq-function and the value function, providing a unified policy evaluation rule for both mean-field game (MFG) and mean-field control (MFC) problems.
- The paper presents a unified q-learning algorithm that can be used to solve both MFG and MFC problems by leveraging the mean-field interactions.
- The paper provides examples in the jump-diffusion setting, including within and beyond the linear-quadratic (LQ) framework, where the exact parameterization of the decoupled Iq-functions and the value functions are obtained.
Plain English Explanation
In this research, the authors explore a reinforcement learning technique called continuous-time q-learning in the context of mean-field jump-diffusion models. These models represent complex systems where a large number of agents interact with each other, and the overall behavior of the system can be characterized by the average or "mean-field" of the agents' actions.
The main challenge the authors address is that the distribution of the population, which is crucial for making optimal decisions, may not be directly observable. To overcome this, they introduce a new concept called the "decoupled Iq-function," which provides a way to evaluate the value of different actions without needing to know the exact population distribution.
The authors show that the decoupled Iq-function and the value function (which represents the overall value of the system) have important mathematical properties, specifically that they can be characterized as martingales. This allows the authors to develop a unified policy evaluation rule that can be used to solve both mean-field game (MFG) problems, where the goal is to find an equilibrium policy, and mean-field control (MFC) problems, where the goal is to find the optimal policy.
The authors then present a q-learning algorithm that can be used to solve both MFG and MFC problems by leveraging the information from the mean-field interactions. They demonstrate the effectiveness of their approach through several examples, including cases within and beyond the linear-quadratic (LQ) framework, where they are able to obtain the exact parameterization of the decoupled Iq-functions and the value functions.
Technical Explanation
The paper focuses on continuous-time q-learning in the context of mean-field jump-diffusion models, where the goal is to find the optimal or equilibrium policy from the perspective of a representative agent. To address the challenge of not having direct access to the population distribution, the authors introduce the concept of the "decoupled Iq-function."
The decoupled Iq-function is a novel way to represent the value of different actions without needing to know the exact population distribution. The authors establish the martingale characterization of the decoupled Iq-function and the value function, which provides a unified policy evaluation rule for both MFG and MFC problems.
For MFG problems, the authors show how the decoupled Iq-function can be used to learn the mean-field equilibrium policy, while for MFC problems, it can be used to learn the mean-field optimal policy. The authors then devise a unified q-learning algorithm that can be used to solve both types of problems by leveraging the information from the mean-field interactions.
The paper provides several examples in the jump-diffusion setting, both within and beyond the LQ framework, where the authors are able to obtain the exact parameterization of the decoupled Iq-functions and the value functions. These examples demonstrate the effectiveness of the authors' approach and provide insights into the behavior of the mean-field system from the representative agent's perspective.
Critical Analysis
The paper presents a novel approach to continuous-time q-learning in mean-field jump-diffusion models, which is a significant contribution to the field of reinforcement learning and control theory. The introduction of the decoupled Iq-function and the establishment of its martingale characterization are particularly noteworthy, as they provide a unified framework for solving both MFG and MFC problems.
One potential limitation of the research is that it assumes the representative agent has access to the mean-field interactions, which may not always be the case in real-world scenarios. Additionally, the paper focuses on the mean-field setting, and it would be interesting to see how the proposed approach could be extended to more general multi-agent systems.
Furthermore, the paper does not discuss the computational complexity of the proposed q-learning algorithm or the potential challenges in scaling it to larger problems. It would be valuable to see an analysis of the algorithm's performance and its robustness to various model assumptions and parameter settings.
Despite these potential limitations, the paper represents an important step forward in the field of reinforcement learning for complex, networked systems. The insights and techniques developed in this work could have a significant impact on a wide range of applications, from finance and economics to transportation and energy systems.
Conclusion
This paper presents a novel approach to continuous-time q-learning in mean-field jump-diffusion models, addressing the challenge of not having direct access to the population distribution. The authors introduce the decoupled Iq-function and establish its martingale characterization, which provides a unified policy evaluation rule for both MFG and MFC problems.
The authors then devise a unified q-learning algorithm that can be used to solve both types of problems by leveraging the mean-field interactions. The paper demonstrates the effectiveness of the proposed approach through several examples, including cases within and beyond the LQ framework.
The research represents an important contribution to the field of reinforcement learning and control theory, with potential applications in a wide range of complex, networked systems. While the paper has some limitations, it opens up new avenues for future research and could inspire further advancements in this exciting area of study.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔎
0
Unified continuous-time q-learning for mean-field game and mean-field control problems
Xiaoli Wei, Xiang Yu, Fengyi Yuan
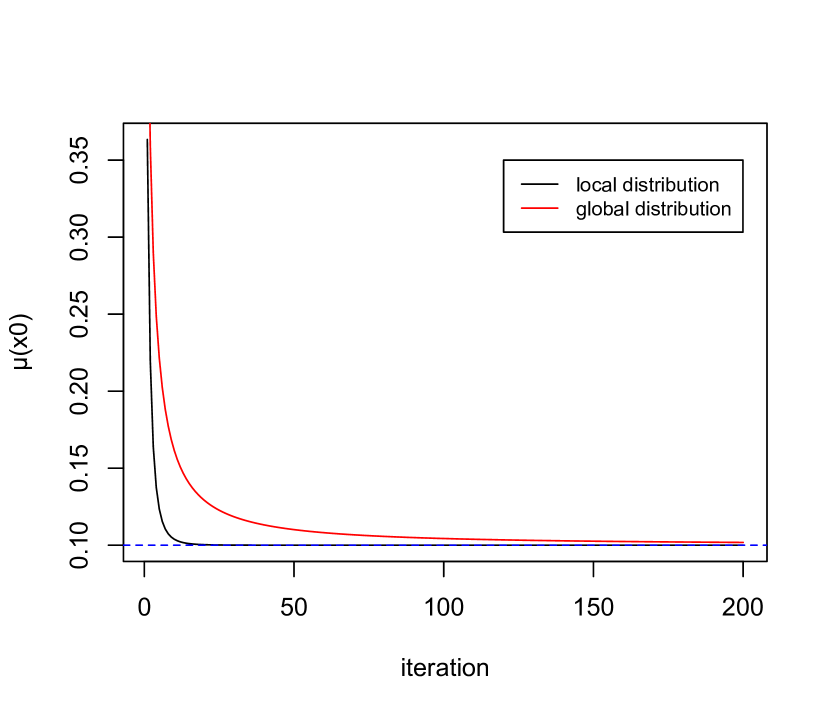
This paper studies the continuous-time q-learning in the mean-field jump-diffusion models from the representative agent's perspective. To overcome the challenge when the population distribution may not be directly observable, we introduce the integrated q-function in decoupled form (decoupled Iq-function) and establish its martingale characterization together with the value function, which provides a unified policy evaluation rule for both mean-field game (MFG) and mean-field control (MFC) problems. Moreover, depending on the task to solve the MFG or MFC problem, we can employ the decoupled Iq-function by different means to learn the mean-field equilibrium policy or the mean-field optimal policy respectively. As a result, we devise a unified q-learning algorithm for both MFG and MFC problems by utilizing all test policies stemming from the mean-field interactions. For several examples in the jump-diffusion setting, within and beyond the LQ framework, we can obtain the exact parameterization of the decoupled Iq-functions and the value functions, and illustrate our algorithm from the representative agent's perspective with satisfactory performance.
Read more7/8/2024

0
Deep Reinforcement Learning for Infinite Horizon Mean Field Problems in Continuous Spaces
Andrea Angiuli, Jean-Pierre Fouque, Ruimeng Hu, Alan Raydan
We present the development and analysis of a reinforcement learning (RL) algorithm designed to solve continuous-space mean field game (MFG) and mean field control (MFC) problems in a unified manner. The proposed approach pairs the actor-critic (AC) paradigm with a representation of the mean field distribution via a parameterized score function, which can be efficiently updated in an online fashion, and uses Langevin dynamics to obtain samples from the resulting distribution. The AC agent and the score function are updated iteratively to converge, either to the MFG equilibrium or the MFC optimum for a given mean field problem, depending on the choice of learning rates. A straightforward modification of the algorithm allows us to solve mixed mean field control games (MFCGs). The performance of our algorithm is evaluated using linear-quadratic benchmarks in the asymptotic infinite horizon framework.
Read more5/6/2024
0
Analysis of Multiscale Reinforcement Q-Learning Algorithms for Mean Field Control Games
Andrea Angiuli, Jean-Pierre Fouque, Mathieu Lauri`ere, Mengrui Zhang
Mean Field Control Games (MFCG), introduced in [Angiuli et al., 2022a], represent competitive games between a large number of large collaborative groups of agents in the infinite limit of number and size of groups. In this paper, we prove the convergence of a three-timescale Reinforcement Q-Learning (RL) algorithm to solve MFCG in a model-free approach from the point of view of representative agents. Our analysis uses a Q-table for finite state and action spaces updated at each discrete time-step over an infinite horizon. In [Angiuli et al., 2023], we proved convergence of two-timescale algorithms for MFG and MFC separately highlighting the need to follow multiple population distributions in the MFC case. Here, we integrate this feature for MFCG as well as three rates of update decreasing to zero in the proper ratios. Our technique of proof uses a generalization to three timescales of the two-timescale analysis in [Borkar, 1997]. We give a simple example satisfying the various hypothesis made in the proof of convergence and illustrating the performance of the algorithm.
Read more6/5/2024

0
A Single Online Agent Can Efficiently Learn Mean Field Games
Chenyu Zhang, Xu Chen, Xuan Di
Mean field games (MFGs) are a promising framework for modeling the behavior of large-population systems. However, solving MFGs can be challenging due to the coupling of forward population evolution and backward agent dynamics. Typically, obtaining mean field Nash equilibria (MFNE) involves an iterative approach where the forward and backward processes are solved alternately, known as fixed-point iteration (FPI). This method requires fully observed population propagation and agent dynamics over the entire spatial domain, which could be impractical in some real-world scenarios. To overcome this limitation, this paper introduces a novel online single-agent model-free learning scheme, which enables a single agent to learn MFNE using online samples, without prior knowledge of the state-action space, reward function, or transition dynamics. Specifically, the agent updates its policy through the value function (Q), while simultaneously evaluating the mean field state (M), using the same batch of observations. We develop two variants of this learning scheme: off-policy and on-policy QM iteration. We prove that they efficiently approximate FPI, and a sample complexity guarantee is provided. The efficacy of our methods is confirmed by numerical experiments.
Read more7/17/2024