UniMSF: A Unified Multi-Sensor Fusion Framework for Intelligent Transportation System Global Localization

0
Sign in to get full access
Overview
- Introduces a unified multi-sensor fusion framework called UniMSF for global localization in intelligent transportation systems
- Integrates various sensor data, including GPS, IMU, and vision, to provide accurate and robust vehicle positioning
- Employs a modular design to enable easy integration of new sensor types and fusion algorithms
Plain English Explanation
The UniMSF: A Unified Multi-Sensor Fusion Framework for Intelligent Transportation System Global Localization* paper presents a comprehensive system for accurately determining the location of vehicles in intelligent transportation networks. This is crucial for enabling advanced autonomous driving and traffic management capabilities.
The UniMSF framework tackles the challenge of fusing data from multiple sensors, such as GPS, inertial measurement units (IMUs), and visual cameras, to provide a unified and robust localization solution. By combining the strengths of these different sensor modalities, the system can overcome the limitations of any single sensor and deliver highly accurate vehicle positioning information.
The framework's modular design allows for easy integration of new sensor types and fusion algorithms as they become available, making it a flexible and future-proof solution. This adaptability is particularly important in the rapidly evolving field of intelligent transportation, where new technologies are constantly emerging.
Technical Explanation
The UniMSF framework employs a sophisticated sensor fusion approach to integrate data from various sources, including GPS, IMUs, and visual sensors. This integration is achieved through a Kalman filter-based framework that continuously updates the vehicle's estimated position, orientation, and velocity.
The system's modular architecture enables the seamless incorporation of additional sensor types, such as GNSS or lidar, and the implementation of advanced multi-modal fusion algorithms. This flexibility ensures that the UniMSF framework can adapt to the evolving needs of intelligent transportation systems, incorporating new sensors and techniques as they become available.
Critical Analysis
The paper provides a thorough evaluation of the UniMSF framework, demonstrating its accuracy, robustness, and computational efficiency through extensive simulations and real-world experiments. However, the authors acknowledge that the system's performance may be affected by factors such as sensor quality, environmental conditions, and infrastructure limitations, which could impact its effectiveness in certain scenarios.
Additionally, the paper does not address potential privacy and security concerns associated with the extensive data collection and processing required for the UniMSF framework. As intelligent transportation systems become more prevalent, it will be crucial to address these issues to ensure public trust and acceptance.
Conclusion
The UniMSF framework presented in this paper represents a significant advancement in the field of intelligent transportation systems, providing a comprehensive and adaptable solution for global localization. By seamlessly integrating data from various sensors, the system can deliver highly accurate vehicle positioning information, which is essential for enabling advanced autonomous driving and traffic management capabilities.
The framework's modular design and flexibility make it a promising candidate for widespread adoption in the rapidly evolving intelligent transportation landscape. As new sensor technologies and fusion algorithms emerge, the UniMSF framework can be easily updated to incorporate these innovations, ensuring its continued relevance and effectiveness.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
UniMSF: A Unified Multi-Sensor Fusion Framework for Intelligent Transportation System Global Localization
Wei Liu, Jiaqi Zhu, Guirong Zhuo, Wufei Fu, Zonglin Meng, Yishi Lu, Min Hua, Feng Qiao, You Li, Yi He, Lu Xiong
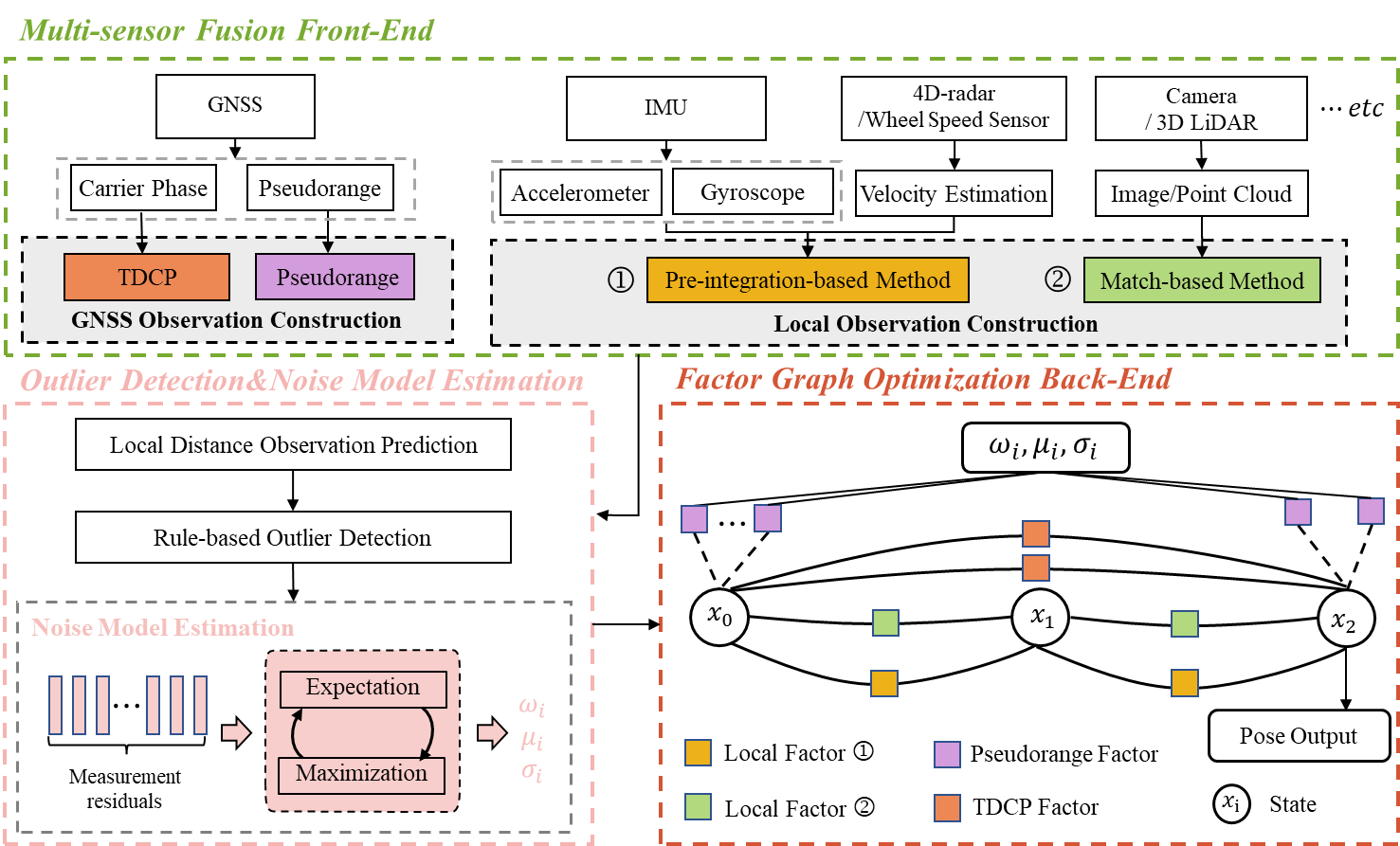
Intelligent transportation systems (ITS) localization is of significant importance as it provides fundamental position and orientation for autonomous operations like intelligent vehicles. Integrating diverse and complementary sensors such as global navigation satellite system (GNSS) and 4D-radar can provide scalable and reliable global localization. Nevertheless, multi-sensor fusion encounters challenges including heterogeneity and time-varying uncertainty in measurements. Consequently, developing a reliable and unified multi-sensor framework remains challenging. In this paper, we introduce UniMSF, a comprehensive multi-sensor fusion localization framework for ITS, utilizing factor graphs. By integrating a multi-sensor fusion front-end, alongside outlier detection&noise model estimation, and a factor graph optimization back-end, this framework accomplishes efficient fusion and ensures accurate localization for ITS. Specifically, in the multi-sensor fusion front-end module, we tackle the measurement heterogeneity among different modality sensors and establish effective measurement models. Reliable outlier detection and data-driven online noise estimation methods ensure that back-end optimization is immune to interference from outlier measurements. In addition, integrating multi-sensor observations via factor graph optimization offers the advantage of enquote{plug and play}. Notably, our framework features high modularity and is seamlessly adapted to various sensor configurations. We demonstrate the effectiveness of the proposed framework through real vehicle tests by tightly integrating GNSS pseudorange and carrier phase information with IMU, and 4D-radar.
Read more9/20/2024
🛠️
0
GNSS/Multi-Sensor Fusion Using Continuous-Time Factor Graph Optimization for Robust Localization
Haoming Zhang, Chih-Chun Chen, Heike Vallery, Timothy D. Barfoot
Accurate and robust vehicle localization in highly urbanized areas is challenging. Sensors are often corrupted in those complicated and large-scale environments. This paper introduces GNSS-FGO, an online and global trajectory estimator that fuses GNSS observations alongside multiple sensor measurements for robust vehicle localization. In GNSS-FGO, we fuse asynchronous sensor measurements into the graph with a continuous-time trajectory representation using Gaussian process regression. This enables querying states at arbitrary timestamps so that sensor observations are fused without requiring strict state and measurement synchronization. Thus, the proposed method presents a generalized factor graph for multi-sensor fusion. To evaluate and study different GNSS fusion strategies, we fuse GNSS measurements in loose and tight coupling with a speed sensor, IMU, and lidar-odometry. We employed datasets from measurement campaigns in Aachen, Duesseldorf, and Cologne in experimental studies and presented comprehensive discussions on sensor observations, smoother types, and hyperparameter tuning. Our results show that the proposed approach enables robust trajectory estimation in dense urban areas, where the classic multi-sensor fusion method fails due to sensor degradation. In a test sequence containing a 17km route through Aachen, the proposed method results in a mean 2D positioning error of 0.48m while fusing raw GNSS observations with lidar odometry in a tight coupling.
Read more8/2/2024

0
GPS-IMU Sensor Fusion for Reliable Autonomous Vehicle Position Estimation
Simegnew Yihunie Alaba
Global Positioning System (GPS) navigation provides accurate positioning with global coverage, making it a reliable option in open areas with unobstructed sky views. However, signal degradation may occur in indoor spaces and urban canyons. In contrast, Inertial Measurement Units (IMUs) consist of gyroscopes and accelerometers that offer relative motion information such as acceleration and rotational changes. Unlike GPS, IMUs do not rely on external signals, making them useful in GPS-denied environments. Nonetheless, IMUs suffer from drift over time due to the accumulation of errors while integrating acceleration to determine velocity and position. Therefore, fusing the GPS and IMU is crucial for enhancing the reliability and precision of navigation systems in autonomous vehicles, especially in environments where GPS signals are compromised. To ensure smooth navigation and overcome the limitations of each sensor, the proposed method fuses GPS and IMU data. This sensor fusion uses the Unscented Kalman Filter (UKF) Bayesian filtering technique. The proposed navigation system is designed to be robust, delivering continuous and accurate positioning critical for the safe operation of autonomous vehicles, particularly in GPS-denied environments. This project uses KITTI GNSS and IMU datasets for experimental validation, showing that the GNSS-IMU fusion technique reduces GNSS-only data's RMSE. The RMSE decreased from 13.214, 13.284, and 13.363 to 4.271, 5.275, and 0.224 for the x-axis, y-axis, and z-axis, respectively. The experimental result using UKF shows promising direction in improving autonomous vehicle navigation using GPS and IMU sensor fusion using the best of two sensors in GPS-denied environments.
Read more5/15/2024

0
MM-Gaussian: 3D Gaussian-based Multi-modal Fusion for Localization and Reconstruction in Unbounded Scenes
Chenyang Wu, Yifan Duan, Xinran Zhang, Yu Sheng, Jianmin Ji, Yanyong Zhang
Localization and mapping are critical tasks for various applications such as autonomous vehicles and robotics. The challenges posed by outdoor environments present particular complexities due to their unbounded characteristics. In this work, we present MM-Gaussian, a LiDAR-camera multi-modal fusion system for localization and mapping in unbounded scenes. Our approach is inspired by the recently developed 3D Gaussians, which demonstrate remarkable capabilities in achieving high rendering quality and fast rendering speed. Specifically, our system fully utilizes the geometric structure information provided by solid-state LiDAR to address the problem of inaccurate depth encountered when relying solely on visual solutions in unbounded, outdoor scenarios. Additionally, we utilize 3D Gaussian point clouds, with the assistance of pixel-level gradient descent, to fully exploit the color information in photos, thereby achieving realistic rendering effects. To further bolster the robustness of our system, we designed a relocalization module, which assists in returning to the correct trajectory in the event of a localization failure. Experiments conducted in multiple scenarios demonstrate the effectiveness of our method.
Read more4/8/2024