GNSS/Multi-Sensor Fusion Using Continuous-Time Factor Graph Optimization for Robust Localization

0
🛠️
Sign in to get full access
Overview
- Accurate and robust vehicle localization in dense urban areas is challenging due to sensor degradation
- The paper introduces GNSS-FGO, an online and global trajectory estimator that fuses GNSS observations with multiple sensor measurements for robust vehicle localization
- GNSS-FGO uses a continuous-time trajectory representation and Gaussian process regression to enable fusion of asynchronous sensor measurements without requiring strict state and measurement synchronization
Plain English Explanation
The paper discusses the challenge of accurately determining the location of a vehicle in crowded, urban environments. Sensors used for vehicle localization, such as GPS, can become unreliable in these complicated and large-scale settings. To address this, the researchers developed a new system called GNSS-FGO.
GNSS-FGO fuses data from multiple sensors, including GPS, inertial measurement units (IMUs), and lidar-based odometry, to estimate the vehicle's location. It uses a novel approach that represents the vehicle's trajectory continuously over time, rather than at discrete points. This allows the system to integrate sensor measurements that are not perfectly synchronized, improving the overall localization accuracy.
The researchers tested GNSS-FGO in several urban environments and found that it outperformed traditional multi-sensor fusion methods, which struggle in dense urban areas where sensor data is degraded. In one test, GNSS-FGO achieved a mean 2D positioning error of just 0.48 meters when fusing raw GPS data with lidar odometry.
Technical Explanation
GNSS-FGO is an online and global trajectory estimator that fuses GNSS (Global Navigation Satellite System) observations alongside multiple sensor measurements, such as from a speed sensor, IMU, and lidar-odometry, to achieve robust vehicle localization in dense urban areas.
The key innovation in GNSS-FGO is the use of a continuous-time trajectory representation using Gaussian process regression. This enables the fusion of asynchronous sensor measurements without requiring strict state and measurement synchronization. The system can query the vehicle's state at arbitrary timestamps, allowing sensor observations to be integrated without the need for precise timing alignment.
GNSS-FGO is formulated as a generalized factor graph that supports the fusion of these diverse sensor inputs. The researchers evaluated different GNSS fusion strategies, including loose and tight coupling with the other sensors. They conducted experiments using datasets collected in the cities of Aachen, Düsseldorf, and Cologne, analyzing the impact of sensor observations, smoother types, and hyperparameter tuning.
The results demonstrate that GNSS-FGO enables robust trajectory estimation in dense urban areas, where traditional multi-sensor fusion methods fail due to sensor degradation. In a 17km test sequence in Aachen, GNSS-FGO achieved a mean 2D positioning error of 0.48 meters when fusing raw GNSS observations with lidar odometry in a tight coupling configuration.
Critical Analysis
The paper presents a promising approach for robust vehicle localization in challenging urban environments. The use of a continuous-time trajectory representation and Gaussian process regression to handle asynchronous sensor measurements is a key technical innovation that helps address the limitations of existing multi-sensor fusion methods.
However, the paper does not provide a detailed analysis of the computational complexity and real-time performance of GNSS-FGO. While the results demonstrate impressive accuracy, the scalability and practicality of the approach for large-scale, real-world deployment scenarios is not fully explored.
Additionally, the paper could have delved deeper into the specific failure modes of traditional multi-sensor fusion techniques in dense urban areas and how GNSS-FGO is able to overcome these limitations. A more comprehensive comparison with other state-of-the-art methods would also help contextualize the contributions of this work.
Future research could investigate the robustness of GNSS-FGO to sensor failures or degradation, as well as explore ways to further optimize the computational efficiency of the approach to enable its use in resource-constrained autonomous vehicle systems.
Conclusion
This paper presents a novel vehicle localization system, GNSS-FGO, that leverages a continuous-time trajectory representation and multi-sensor fusion to achieve robust and accurate localization in challenging urban environments. The key innovation is the ability to fuse asynchronous sensor measurements without requiring strict state and measurement synchronization, which helps overcome the limitations of traditional multi-sensor fusion methods in dense urban areas.
The experimental results demonstrate the effectiveness of GNSS-FGO, with a mean 2D positioning error of just 0.48 meters in a 17km test sequence. This research contributes to the ongoing efforts to develop reliable and high-precision localization solutions for autonomous vehicles and other mobile robotics applications operating in complex, real-world settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🛠️
0
GNSS/Multi-Sensor Fusion Using Continuous-Time Factor Graph Optimization for Robust Localization
Haoming Zhang, Chih-Chun Chen, Heike Vallery, Timothy D. Barfoot
Accurate and robust vehicle localization in highly urbanized areas is challenging. Sensors are often corrupted in those complicated and large-scale environments. This paper introduces GNSS-FGO, an online and global trajectory estimator that fuses GNSS observations alongside multiple sensor measurements for robust vehicle localization. In GNSS-FGO, we fuse asynchronous sensor measurements into the graph with a continuous-time trajectory representation using Gaussian process regression. This enables querying states at arbitrary timestamps so that sensor observations are fused without requiring strict state and measurement synchronization. Thus, the proposed method presents a generalized factor graph for multi-sensor fusion. To evaluate and study different GNSS fusion strategies, we fuse GNSS measurements in loose and tight coupling with a speed sensor, IMU, and lidar-odometry. We employed datasets from measurement campaigns in Aachen, Duesseldorf, and Cologne in experimental studies and presented comprehensive discussions on sensor observations, smoother types, and hyperparameter tuning. Our results show that the proposed approach enables robust trajectory estimation in dense urban areas, where the classic multi-sensor fusion method fails due to sensor degradation. In a test sequence containing a 17km route through Aachen, the proposed method results in a mean 2D positioning error of 0.48m while fusing raw GNSS observations with lidar odometry in a tight coupling.
Read more8/2/2024
0
FE-GUT: Factor Graph Optimization hybrid with Extended Kalman Filter for tightly coupled GNSS/UWB Integration
Qijia Zhao, Shaolin Lu, Jianan Lou, Rong Zhang
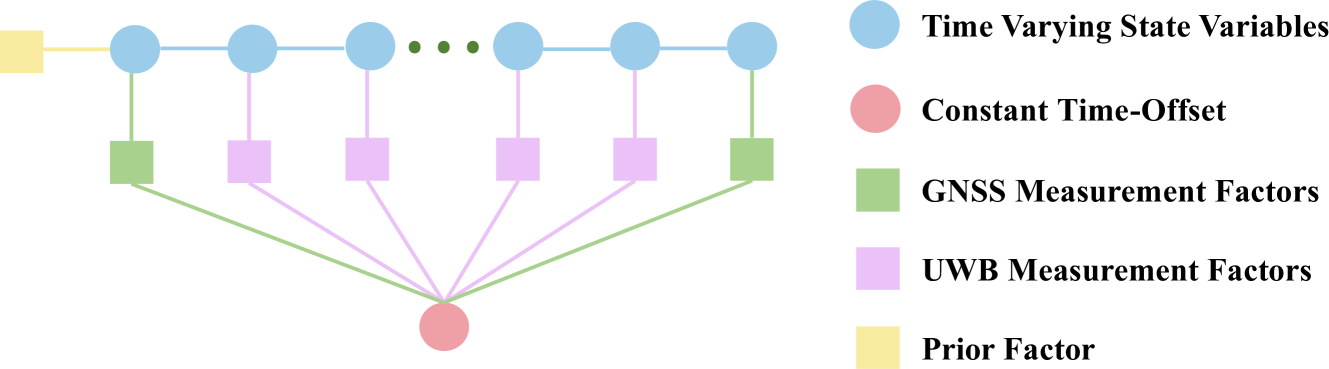
Precise positioning and navigation information has been increasingly important with the development of the consumer electronics market. Due to some deficits of Global Navigation Satellite System (GNSS), such as susceptible to interferences, integrating of GNSS with additional alternative sensors is a promising approach to overcome the performance limitations of GNSS-based localization systems. Ultra-Wideband (UWB) can be used to enhance GNSS in constructing an integrated localization system. However, most low-cost UWB devices lack a hardware-level time synchronization feature, which necessitates the estimation and compensation of the time-offset in the tightly coupled GNSS/UWB integration. Given the flexibility of probabilistic graphical models, the time-offset can be modeled as an invariant constant in the discretization of the continuous model. This work proposes a novel architecture in which Factor Graph Optimization (FGO) is hybrid with Extend Kalman Filter (EKF) for tightly coupled GNSS/UWB integration with online Temporal calibration (FE-GUT). FGO is utilized to precisely estimate the time-offset, while EKF provides initailization for the new factors and performs time-offset compensation. Simulation-based experiments validate the integrated localization performance of FE-GUT. In a four-wheeled robot scenario, the results demonstrate that, compared to EKF, FE-GUT can improve horizontal and vertical localization accuracy by 58.59% and 34.80%, respectively, while the time-offset estimation accuracy is improved by 76.80%. All the source codes and datasets can be gotten via https://github.com/zhaoqj23/FE-GUT/.
Read more7/10/2024
0
UniMSF: A Unified Multi-Sensor Fusion Framework for Intelligent Transportation System Global Localization
Wei Liu, Jiaqi Zhu, Guirong Zhuo, Wufei Fu, Zonglin Meng, Yishi Lu, Min Hua, Feng Qiao, You Li, Yi He, Lu Xiong
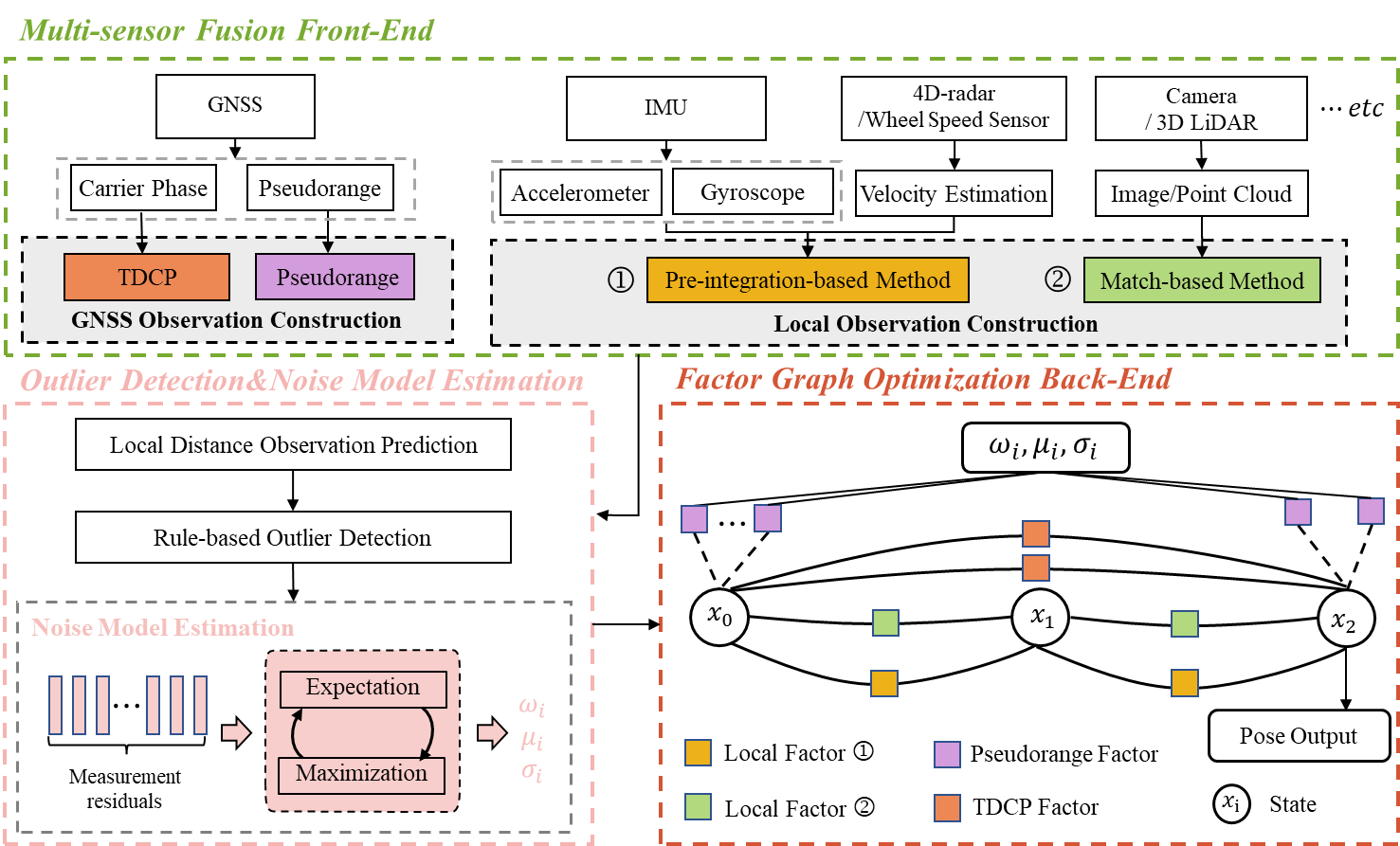
Intelligent transportation systems (ITS) localization is of significant importance as it provides fundamental position and orientation for autonomous operations like intelligent vehicles. Integrating diverse and complementary sensors such as global navigation satellite system (GNSS) and 4D-radar can provide scalable and reliable global localization. Nevertheless, multi-sensor fusion encounters challenges including heterogeneity and time-varying uncertainty in measurements. Consequently, developing a reliable and unified multi-sensor framework remains challenging. In this paper, we introduce UniMSF, a comprehensive multi-sensor fusion localization framework for ITS, utilizing factor graphs. By integrating a multi-sensor fusion front-end, alongside outlier detection&noise model estimation, and a factor graph optimization back-end, this framework accomplishes efficient fusion and ensures accurate localization for ITS. Specifically, in the multi-sensor fusion front-end module, we tackle the measurement heterogeneity among different modality sensors and establish effective measurement models. Reliable outlier detection and data-driven online noise estimation methods ensure that back-end optimization is immune to interference from outlier measurements. In addition, integrating multi-sensor observations via factor graph optimization offers the advantage of enquote{plug and play}. Notably, our framework features high modularity and is seamlessly adapted to various sensor configurations. We demonstrate the effectiveness of the proposed framework through real vehicle tests by tightly integrating GNSS pseudorange and carrier phase information with IMU, and 4D-radar.
Read more9/20/2024

0
G-Loc: Tightly-coupled Graph Localization with Prior Topo-metric Information
Lorenzo Montano-Oliv'an, Julio A. Placed, Luis Montano, Mar'ia T. L'azaro
Localization in already mapped environments is a critical component in many robotics and automotive applications, where previously acquired information can be exploited along with sensor fusion to provide robust and accurate localization estimates. In this work, we offer a new perspective on map-based localization by reusing prior topological and metric information. Thus, we reformulate this long-studied problem to go beyond the mere use of metric maps. Our framework seamlessly integrates LiDAR, inertial and GNSS measurements, and cloud-to-map registrations in a sliding window graph fashion, which allows to accommodate the uncertainty of each observation. The modularity of our framework allows it to work with different sensor configurations (e.g., LiDAR resolutions, GNSS denial) and environmental conditions (e.g., mapless regions, large environments). We have conducted several validation experiments, including the deployment in a real-world automotive application, demonstrating the accuracy, efficiency, and versatility of our system in online localization.
Read more9/10/2024