Urban Region Pre-training and Prompting: A Graph-based Approach

0

Sign in to get full access
Overview
- The paper introduces a novel graph-based approach for pre-training and prompting urban region representations.
- It aims to capture the complex spatial and semantic relationships within urban areas to enable more effective downstream applications.
- The proposed method leverages graph neural networks and pre-training techniques to learn expressive representations of urban regions.
Plain English Explanation
The paper describes a new way to represent and understand urban regions using graphs. Graphs are a type of data structure that can capture the relationships and connections between different elements, like buildings, roads, and neighborhoods.
The researchers developed a graph-based approach to pre-train and prompt urban region representations. Pre-training means they trained the model on a large dataset to give it a strong initial understanding of urban areas. Prompting refers to using this pre-trained model to quickly adapt it to new, specific tasks, like predicting traffic patterns or identifying high-risk neighborhoods.
By representing urban areas as graphs, the model can learn about the complex spatial and semantic relationships within cities. This allows it to build more meaningful and expressive representations compared to simpler, flat data structures. The researchers used graph neural networks, a type of machine learning model that is well-suited for working with graph-structured data.
The key advantage of this approach is that it can lead to more effective downstream applications, such as urban planning, transportation optimization, or public policy decision-making. By starting with a strong, pre-trained understanding of urban regions, the model can be quickly adapted to tackle a wide variety of real-world problems in cities.
Technical Explanation
The paper proposes a graph-based approach for pre-training and prompting urban region representations. The core idea is to leverage the expressive power of graphs to capture the complex spatial and semantic relationships within urban areas.
The researchers first construct a urban region graph, where nodes represent different geographic units (e.g., neighborhoods, census tracts) and edges encode various relationships between them, such as proximity, social-economic similarity, or transportation connectivity. They then pre-train a graph neural network model on this graph data to learn expressive urban region representations.
These pre-trained representations can then be prompted for various downstream tasks, such as urban planning, transportation optimization, or public policy decision-making. The key advantage of this approach is that the pre-trained model can be quickly adapted to new tasks by fine-tuning on relatively small amounts of task-specific data, leveraging the rich, pre-learned representations of urban regions.
Critical Analysis
The paper presents a compelling approach to urban region representation learning, but it also acknowledges several limitations and areas for future research:
- Dataset Bias: The pre-training dataset may not fully capture the diversity of urban environments, potentially leading to biases in the learned representations.
- Interpretability: While the graph-based representations are expressive, they may lack interpretability, making it challenging to understand the specific factors driving the model's decisions.
- Scalability: Scaling the graph construction and pre-training process to handle large-scale, high-resolution urban data may pose computational challenges.
Additionally, the researchers could explore ways to incorporate multi-modal data (e.g., satellite imagery, street-level photos, census data) to further enrich the urban region representations. Adversarial learning techniques could also be investigated to improve the robustness and fairness of the representations.
Conclusion
The paper presents a novel graph-based approach for pre-training and prompting urban region representations, which aims to capture the complex spatial and semantic relationships within cities. By leveraging graph neural networks and pre-training techniques, the proposed method can learn expressive representations that can be effectively adapted to a wide range of downstream applications in urban computing and planning.
While the paper highlights several limitations and areas for future research, the overall approach offers a promising direction for advancing the field of urban region representation learning and enabling more effective data-driven decision-making in cities.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Urban Region Pre-training and Prompting: A Graph-based Approach
Jiahui Jin, Yifan Song, Dong Kan, Haojia Zhu, Xiangguo Sun, Zhicheng Li, Xigang Sun, Jinghui Zhang
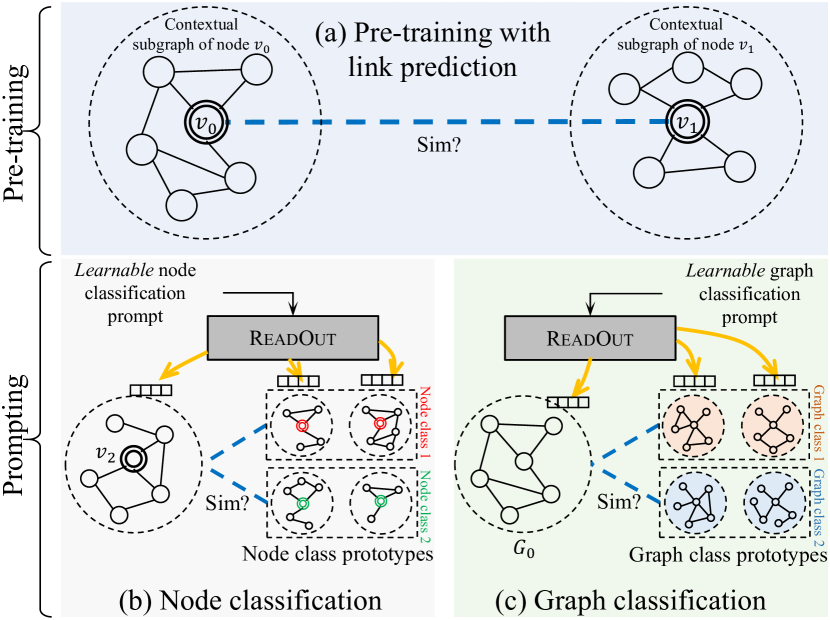
Urban region representation is crucial for various urban downstream tasks. However, despite the proliferation of methods and their success, acquiring general urban region knowledge and adapting to different tasks remains challenging. Previous work often neglects the spatial structures and functional layouts between entities, limiting their ability to capture transferable knowledge across regions. Further, these methods struggle to adapt effectively to specific downstream tasks, as they do not adequately address the unique features and relationships required for different downstream tasks. In this paper, we propose a $textbf{G}$raph-based $textbf{U}$rban $textbf{R}$egion $textbf{P}$re-training and $textbf{P}$rompting framework ($textbf{GURPP}$) for region representation learning. Specifically, we first construct an urban region graph that integrates detailed spatial entity data for more effective urban region representation. Then, we develop a subgraph-centric urban region pre-training model to capture the heterogeneous and transferable patterns of interactions among entities. To further enhance the adaptability of these embeddings to different tasks, we design two graph-based prompting methods to incorporate explicit/hidden task knowledge. Extensive experiments on various urban region prediction tasks and different cities demonstrate the superior performance of our GURPP framework.
Read more8/27/2024
0
Generalized Graph Prompt: Toward a Unification of Pre-Training and Downstream Tasks on Graphs
Xingtong Yu, Zhenghao Liu, Yuan Fang, Zemin Liu, Sihong Chen, Xinming Zhang
Graph neural networks have emerged as a powerful tool for graph representation learning, but their performance heavily relies on abundant task-specific supervision. To reduce labeling requirement, the pre-train, prompt paradigms have become increasingly common. However, existing study of prompting on graphs is limited, lacking a universal treatment to appeal to different downstream tasks. In this paper, we propose GraphPrompt, a novel pre-training and prompting framework on graphs. GraphPrompt not only unifies pre-training and downstream tasks into a common task template but also employs a learnable prompt to assist a downstream task in locating the most relevant knowledge from the pre-trained model in a task-specific manner. To further enhance GraphPrompt in these two stages, we extend it into GraphPrompt+ with two major enhancements. First, we generalize several popular graph pre-training tasks beyond simple link prediction to broaden the compatibility with our task template. Second, we propose a more generalized prompt design that incorporates a series of prompt vectors within every layer of the pre-trained graph encoder, in order to capitalize on the hierarchical information across different layers beyond just the readout layer. Finally, we conduct extensive experiments on five public datasets to evaluate and analyze GraphPrompt and GraphPrompt+.
Read more8/27/2024

0
Attentive Graph Enhanced Region Representation Learning
Weiliang Chen, Qianqian Ren, Jinbao Li
Representing urban regions accurately and comprehensively is essential for various urban planning and analysis tasks. Recently, with the expansion of the city, modeling long-range spatial dependencies with multiple data sources plays an important role in urban region representation. In this paper, we propose the Attentive Graph Enhanced Region Representation Learning (ATGRL) model, which aims to capture comprehensive dependencies from multiple graphs and learn rich semantic representations of urban regions. Specifically, we propose a graph-enhanced learning module to construct regional graphs by incorporating mobility flow patterns, point of interests (POIs) functions, and check-in semantics with noise filtering. Then, we present a multi-graph aggregation module to capture both local and global spatial dependencies between regions by integrating information from multiple graphs. In addition, we design a dual-stage fusion module to facilitate information sharing between different views and efficiently fuse multi-view representations for urban region embedding using an improved linear attention mechanism. Finally, extensive experiments on real-world datasets for three downstream tasks demonstrate the superior performance of our model compared to state-of-the-art methods.
Read more6/4/2024
0
UrbanVLP: Multi-Granularity Vision-Language Pretraining for Urban Region Profiling
Xixuan Hao, Wei Chen, Yibo Yan, Siru Zhong, Kun Wang, Qingsong Wen, Yuxuan Liang
Urban region profiling aims to learn a low-dimensional representation of a given urban area while preserving its characteristics, such as demographics, infrastructure, and economic activities, for urban planning and development. However, prevalent pretrained models, particularly those reliant on satellite imagery, face dual challenges. Firstly, concentrating solely on macro-level patterns from satellite data may introduce bias, lacking nuanced details at micro levels, such as architectural details at a place.Secondly, the lack of interpretability in pretrained models limits their utility in providing transparent evidence for urban planning. In response to these issues, we devise a novel framework entitled UrbanVLP based on Vision-Language Pretraining. Our UrbanVLP seamlessly integrates multi-granularity information from both macro (satellite) and micro (street-view) levels, overcoming the limitations of prior pretrained models. Moreover, it introduces automatic text generation and calibration, elevating interpretability in downstream applications by producing high-quality text descriptions of urban imagery. Rigorous experiments conducted across six urban indicator prediction tasks underscore its superior performance.
Read more5/30/2024