UrbanVLP: Multi-Granularity Vision-Language Pretraining for Urban Region Profiling

0
Sign in to get full access
Overview
- This paper introduces UrbanVLP, a multi-granularity vision-language pre-trained foundation model for urban indicator prediction.
- UrbanVLP is designed to leverage both visual and textual data to understand and analyze urban environments at different scales, from individual buildings to entire cities.
- The researchers pre-train UrbanVLP on a large and diverse dataset, then fine-tune it on various urban prediction tasks to demonstrate its capabilities.
Plain English Explanation
UrbanVLP is a new AI model that has been trained on a large amount of visual and textual data about cities. The model is designed to understand and analyze urban environments at different scales, from individual buildings to entire cities. For example, it could be used to predict the age, condition, or function of a building based on an image, or to estimate the population density of a neighborhood from satellite imagery.
The key idea behind UrbanVLP is to combine visual and textual information to get a more comprehensive understanding of urban areas. This is similar to how humans use both what they see and what they read to learn about cities. By pre-training the model on a large, diverse dataset, the researchers have given UrbanVLP a broad foundation of knowledge that it can then apply to specific urban prediction tasks.
Technical Explanation
The researchers pre-train UrbanVLP on a dataset that includes satellite and street-level imagery, as well as associated text data such as building descriptions and news articles. This allows the model to learn relationships between visual and textual urban features at multiple scales, from individual buildings to entire neighborhoods and cities.
The UrbanVLP architecture is based on a vision-language transformer that can process both image and text inputs. The model is pre-trained using self-supervised objectives such as masked language modeling and image-text matching, which teach it to understand the connections between visual and textual urban data.
After pre-training, UrbanVLP is fine-tuned on a variety of urban prediction tasks, such as building function classification, population density estimation, and socioeconomic status prediction. The researchers demonstrate that UrbanVLP outperforms models that use only visual or textual data, highlighting the value of the multi-granularity vision-language approach.
Critical Analysis
The researchers acknowledge that UrbanVLP is limited by the quality and coverage of its pre-training dataset, which may not fully capture the diversity of urban environments globally. There is also a need for more interpretability and explainability in how the model arrives at its predictions, particularly for high-stakes applications like urban planning and policy decisions.
Additionally, the researchers do not address potential biases or fairness issues that could arise from using UrbanVLP, such as the risk of perpetuating existing socioeconomic and demographic disparities in urban areas. These are important considerations that should be explored further in future research.
Conclusion
UrbanVLP represents an important step forward in developing AI models that can comprehensively understand and analyze urban environments. By leveraging both visual and textual data, the model can provide valuable insights at multiple scales, with potential applications in urban planning, infrastructure management, and socioeconomic analysis.
However, the research also highlights the need for continued work to address the limitations and potential risks of such powerful AI systems. As UrbanVLP and similar models become more widely adopted, it will be crucial to ensure they are developed and deployed responsibly, with a focus on transparency, fairness, and positive societal impact.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
UrbanVLP: Multi-Granularity Vision-Language Pretraining for Urban Region Profiling
Xixuan Hao, Wei Chen, Yibo Yan, Siru Zhong, Kun Wang, Qingsong Wen, Yuxuan Liang
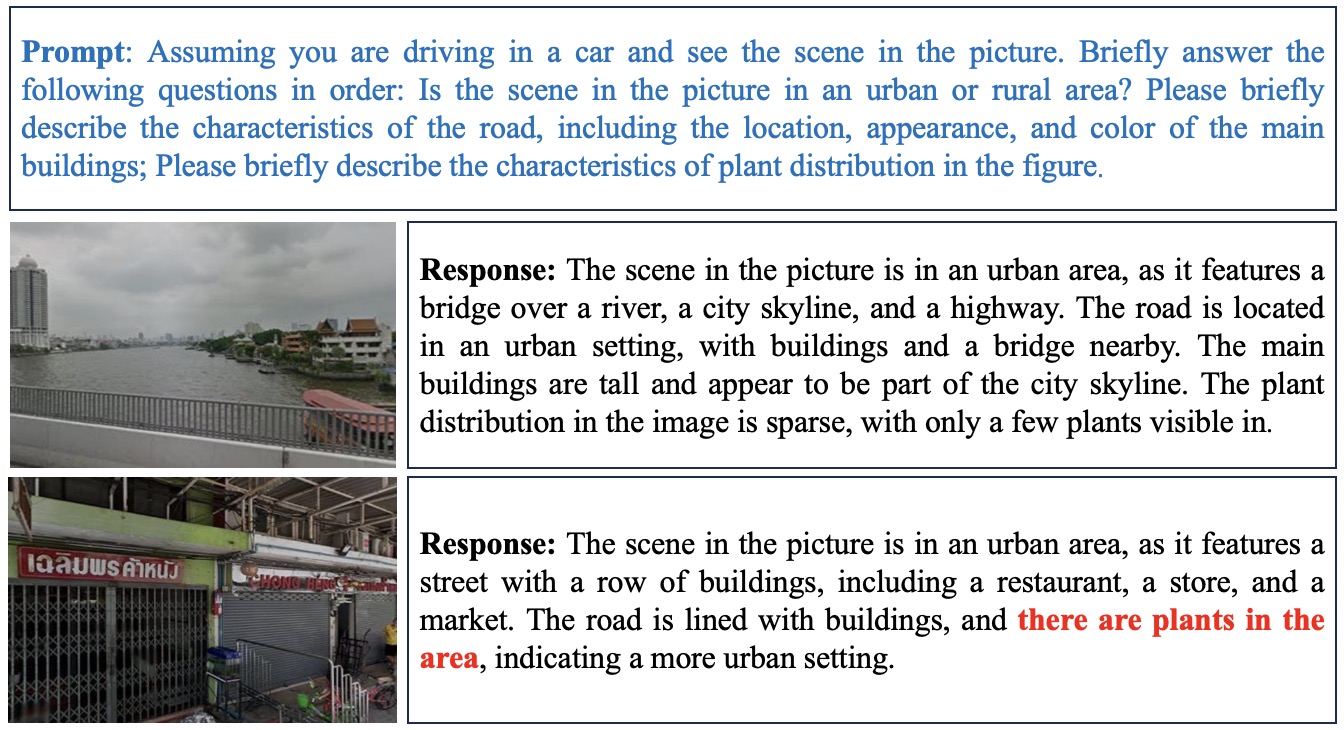
Urban region profiling aims to learn a low-dimensional representation of a given urban area while preserving its characteristics, such as demographics, infrastructure, and economic activities, for urban planning and development. However, prevalent pretrained models, particularly those reliant on satellite imagery, face dual challenges. Firstly, concentrating solely on macro-level patterns from satellite data may introduce bias, lacking nuanced details at micro levels, such as architectural details at a place.Secondly, the lack of interpretability in pretrained models limits their utility in providing transparent evidence for urban planning. In response to these issues, we devise a novel framework entitled UrbanVLP based on Vision-Language Pretraining. Our UrbanVLP seamlessly integrates multi-granularity information from both macro (satellite) and micro (street-view) levels, overcoming the limitations of prior pretrained models. Moreover, it introduces automatic text generation and calibration, elevating interpretability in downstream applications by producing high-quality text descriptions of urban imagery. Rigorous experiments conducted across six urban indicator prediction tasks underscore its superior performance.
Read more5/30/2024

0
3D Vision and Language Pretraining with Large-Scale Synthetic Data
Dejie Yang, Zhu Xu, Wentao Mo, Qingchao Chen, Siyuan Huang, Yang Liu
3D Vision-Language Pre-training (3D-VLP) aims to provide a pre-train model which can bridge 3D scenes with natural language, which is an important technique for embodied intelligence. However, current 3D-VLP datasets are hindered by limited scene-level diversity and insufficient fine-grained annotations (only 1.2K scenes and 280K textual annotations in ScanScribe), primarily due to the labor-intensive of collecting and annotating 3D scenes. To overcome these obstacles, we construct SynVL3D, a comprehensive synthetic scene-text corpus with 10K indoor scenes and 1M descriptions at object, view, and room levels, which has the advantages of diverse scene data, rich textual descriptions, multi-grained 3D-text associations, and low collection cost. Utilizing the rich annotations in SynVL3D, we pre-train a simple and unified Transformer for aligning 3D and language with multi-grained pretraining tasks. Moreover, we propose a synthetic-to-real domain adaptation in downstream task fine-tuning process to address the domain shift. Through extensive experiments, we verify the effectiveness of our model design by achieving state-of-the-art performance on downstream tasks including visual grounding, dense captioning, and question answering.
Read more7/9/2024
0
LVLM-empowered Multi-modal Representation Learning for Visual Place Recognition
Teng Wang, Lingquan Meng, Lei Cheng, Changyin Sun
Visual place recognition (VPR) remains challenging due to significant viewpoint changes and appearance variations. Mainstream works tackle these challenges by developing various feature aggregation methods to transform deep features into robust and compact global representations. Unfortunately, satisfactory results cannot be achieved under challenging conditions. We start from a new perspective and attempt to build a discriminative global representations by fusing image data and text descriptions of the the visual scene. The motivation is twofold: (1) Current Large Vision-Language Models (LVLMs) demonstrate extraordinary emergent capability in visual instruction following, and thus provide an efficient and flexible manner in generating text descriptions of images; (2) The text descriptions, which provide high-level scene understanding, show strong robustness against environment variations. Although promising, leveraging LVLMs to build multi-modal VPR solutions remains challenging in efficient multi-modal fusion. Furthermore, LVLMs will inevitably produces some inaccurate descriptions, making it even harder. To tackle these challenges, we propose a novel multi-modal VPR solution. It first adapts pre-trained visual and language foundation models to VPR for extracting image and text features, which are then fed into the feature combiner to enhance each other. As the main component, the feature combiner first propose a token-wise attention block to adaptively recalibrate text tokens according to their relevance to the image data, and then develop an efficient cross-attention fusion module to propagate information across different modalities. The enhanced multi-modal features are compressed into the feature descriptor for performing retrieval. Experimental results show that our method outperforms state-of-the-art methods by a large margin with significantly smaller image descriptor dimension.
Read more7/10/2024

0
Urban Region Pre-training and Prompting: A Graph-based Approach
Jiahui Jin, Yifan Song, Dong Kan, Haojia Zhu, Xiangguo Sun, Zhicheng Li, Xigang Sun, Jinghui Zhang
Urban region representation is crucial for various urban downstream tasks. However, despite the proliferation of methods and their success, acquiring general urban region knowledge and adapting to different tasks remains challenging. Previous work often neglects the spatial structures and functional layouts between entities, limiting their ability to capture transferable knowledge across regions. Further, these methods struggle to adapt effectively to specific downstream tasks, as they do not adequately address the unique features and relationships required for different downstream tasks. In this paper, we propose a $textbf{G}$raph-based $textbf{U}$rban $textbf{R}$egion $textbf{P}$re-training and $textbf{P}$rompting framework ($textbf{GURPP}$) for region representation learning. Specifically, we first construct an urban region graph that integrates detailed spatial entity data for more effective urban region representation. Then, we develop a subgraph-centric urban region pre-training model to capture the heterogeneous and transferable patterns of interactions among entities. To further enhance the adaptability of these embeddings to different tasks, we design two graph-based prompting methods to incorporate explicit/hidden task knowledge. Extensive experiments on various urban region prediction tasks and different cities demonstrate the superior performance of our GURPP framework.
Read more8/27/2024