UrbanIR: Large-Scale Urban Scene Inverse Rendering from a Single Video

0

Sign in to get full access
Overview
- The paper presents UrbanIR, a large-scale urban scene inverse rendering framework that can reconstruct detailed 3D geometry, material, and lighting properties from a single video.
- The key innovations include a hybrid network architecture, multi-scale representation, and self-supervised training strategy.
- The method is demonstrated on a new large-scale dataset of urban scenes, showing significant improvements over previous approaches.
Plain English Explanation
UrbanIR: Large-Scale Urban Scene Inverse Rendering from a Single Video describes a system that can take a single video of an urban scene and use it to reconstruct the 3D geometry, materials, and lighting of that scene in detailed fashion.
The core idea is to use a hybrid neural network architecture that can efficiently process the visual information in the video and output a comprehensive 3D model of the environment. This includes not just the shapes of buildings and streets, but also the specific materials used (e.g. brick, glass, concrete) and the lighting conditions.
The researchers developed a multi-scale representation to capture details at different levels, from the overall layout down to fine surface textures. They also used a self-supervised training strategy, where the network learns by trying to reproduce the input video from its own 3D reconstruction, without requiring expensive manual labeling.
This system was tested on a new, large-scale dataset of urban scenes, and was shown to significantly outperform previous methods in terms of the accuracy and completeness of the reconstructions. The ability to capture so much detail from a single video has exciting applications in areas like urban planning, virtual reality, and autonomous driving.
Technical Explanation
The UrbanIR framework uses a hybrid network architecture to perform large-scale urban scene inverse rendering from a single input video. The key innovations include:
-
Hybrid Network Architecture: UrbanIR combines a CNN-based encoder-decoder for coarse geometry and material prediction, with a transformer-based module for refined 3D reconstruction and lighting estimation. This hybrid design allows the system to efficiently process the video data and output a detailed 3D scene model.
-
Multi-Scale Representation: The network uses a multi-scale feature representation to capture details at different levels, from the overall scene layout to fine surface textures. This enables high-fidelity reconstructions of complex urban environments.
-
Self-Supervised Training: UrbanIR is trained in a self-supervised manner, where the network learns to reconstruct the input video from its own 3D predictions, without requiring expensive manual annotations. This allows the model to be trained on large-scale, uncurated urban datasets.
The method is evaluated on a new, large-scale dataset of urban scenes, and is shown to significantly outperform previous inverse rendering approaches in terms of reconstruction quality and completeness.
Critical Analysis
The UrbanIR framework represents an impressive advancement in the field of large-scale urban scene reconstruction from video. The key strengths of the approach include:
- The hybrid network architecture effectively combines the strengths of CNNs and transformers to handle the complexity of urban scenes.
- The multi-scale representation allows the model to capture details at multiple levels, leading to highly realistic reconstructions.
- The self-supervised training strategy enables the use of large, uncurated datasets, overcoming the data scarcity challenge faced by many previous methods.
However, some potential limitations and areas for further research include:
- The current system may struggle with highly dynamic urban environments, such as those with moving vehicles or people. Incorporating temporal information more explicitly could help address this.
- The reconstruction quality may degrade for very sparse or low-quality input videos. Investigating robust techniques to handle such challenging input conditions would be valuable.
- While the method demonstrates state-of-the-art performance, there may still be room for improvement in terms of reconstruction accuracy and level of detail, especially for fine-grained surface properties and lighting.
Overall, UrbanIR represents a significant step forward in the field of inverse rendering, with the potential to enable a wide range of applications in urban planning, virtual reality, and autonomous systems.
Conclusion
The UrbanIR framework presented in this paper is a powerful tool for large-scale urban scene reconstruction from a single video. By leveraging a hybrid network architecture, multi-scale representation, and self-supervised training, the system can generate detailed 3D models of complex urban environments, including their geometry, materials, and lighting conditions.
The demonstrated improvements over previous inverse rendering approaches highlight the potential of UrbanIR to enable new applications in areas such as urban planning, virtual tourism, and autonomous driving. As the field continues to evolve, further research on handling dynamic scenes, improving reconstruction quality, and expanding the range of supported input conditions could lead to even more compelling and impactful solutions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
UrbanIR: Large-Scale Urban Scene Inverse Rendering from a Single Video
Zhi-Hao Lin, Bohan Liu, Yi-Ting Chen, Kuan-Sheng Chen, David Forsyth, Jia-Bin Huang, Anand Bhattad, Shenlong Wang
We present UrbanIR (Urban Scene Inverse Rendering), a new inverse graphics model that enables realistic, free-viewpoint renderings of scenes under various lighting conditions with a single video. It accurately infers shape, albedo, visibility, and sun and sky illumination from wide-baseline videos, such as those from car-mounted cameras, differing from NeRF's dense view settings. In this context, standard methods often yield subpar geometry and material estimates, such as inaccurate roof representations and numerous 'floaters'. UrbanIR addresses these issues with novel losses that reduce errors in inverse graphics inference and rendering artifacts. Its techniques allow for precise shadow volume estimation in the original scene. The model's outputs support controllable editing, enabling photorealistic free-viewpoint renderings of night simulations, relit scenes, and inserted objects, marking a significant improvement over existing state-of-the-art methods.
Read more8/27/2024
🌀
0
Holistic Inverse Rendering of Complex Facade via Aerial 3D Scanning
Zixuan Xie, Rengan Xie, Rong Li, Kai Huang, Pengju Qiao, Jingsen Zhu, Xu Yin, Qi Ye, Wei Hua, Yuchi Huo, Hujun Bao
In this work, we use multi-view aerial images to reconstruct the geometry, lighting, and material of facades using neural signed distance fields (SDFs). Without the requirement of complex equipment, our method only takes simple RGB images captured by a drone as inputs to enable physically based and photorealistic novel-view rendering, relighting, and editing. However, a real-world facade usually has complex appearances ranging from diffuse rocks with subtle details to large-area glass windows with specular reflections, making it hard to attend to everything. As a result, previous methods can preserve the geometry details but fail to reconstruct smooth glass windows or verse vise. In order to address this challenge, we introduce three spatial- and semantic-adaptive optimization strategies, including a semantic regularization approach based on zero-shot segmentation techniques to improve material consistency, a frequency-aware geometry regularization to balance surface smoothness and details in different surfaces, and a visibility probe-based scheme to enable efficient modeling of the local lighting in large-scale outdoor environments. In addition, we capture a real-world facade aerial 3D scanning image set and corresponding point clouds for training and benchmarking. The experiment demonstrates the superior quality of our method on facade holistic inverse rendering, novel view synthesis, and scene editing compared to state-of-the-art baselines.
Read more4/9/2024

0
Inverse Neural Rendering for Explainable Multi-Object Tracking
Julian Ost, Tanushree Banerjee, Mario Bijelic, Felix Heide
Today, most methods for image understanding tasks rely on feed-forward neural networks. While this approach has allowed for empirical accuracy, efficiency, and task adaptation via fine-tuning, it also comes with fundamental disadvantages. Existing networks often struggle to generalize across different datasets, even on the same task. By design, these networks ultimately reason about high-dimensional scene features, which are challenging to analyze. This is true especially when attempting to predict 3D information based on 2D images. We propose to recast 3D multi-object tracking from RGB cameras as an emph{Inverse Rendering (IR)} problem, by optimizing via a differentiable rendering pipeline over the latent space of pre-trained 3D object representations and retrieve the latents that best represent object instances in a given input image. To this end, we optimize an image loss over generative latent spaces that inherently disentangle shape and appearance properties. We investigate not only an alternate take on tracking but our method also enables examining the generated objects, reasoning about failure situations, and resolving ambiguous cases. We validate the generalization and scaling capabilities of our method by learning the generative prior exclusively from synthetic data and assessing camera-based 3D tracking on the nuScenes and Waymo datasets. Both these datasets are completely unseen to our method and do not require fine-tuning. Videos and code are available at https://light.princeton.edu/inverse-rendering-tracking/.
Read more4/19/2024
0
Photorealistic Object Insertion with Diffusion-Guided Inverse Rendering
Ruofan Liang, Zan Gojcic, Merlin Nimier-David, David Acuna, Nandita Vijaykumar, Sanja Fidler, Zian Wang
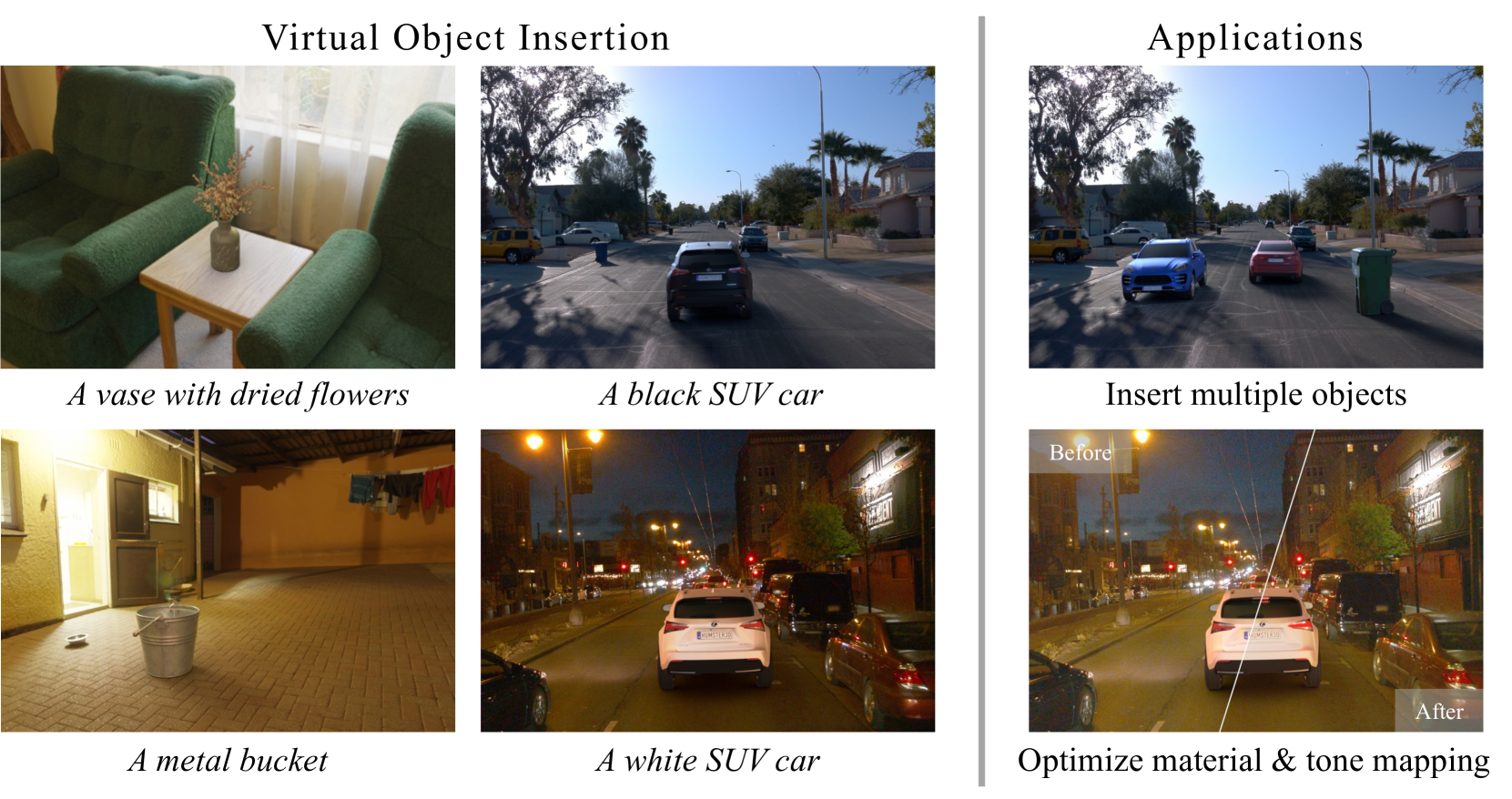
The correct insertion of virtual objects in images of real-world scenes requires a deep understanding of the scene's lighting, geometry and materials, as well as the image formation process. While recent large-scale diffusion models have shown strong generative and inpainting capabilities, we find that current models do not sufficiently understand the scene shown in a single picture to generate consistent lighting effects (shadows, bright reflections, etc.) while preserving the identity and details of the composited object. We propose using a personalized large diffusion model as guidance to a physically based inverse rendering process. Our method recovers scene lighting and tone-mapping parameters, allowing the photorealistic composition of arbitrary virtual objects in single frames or videos of indoor or outdoor scenes. Our physically based pipeline further enables automatic materials and tone-mapping refinement.
Read more8/20/2024