UruBots UAV -- Air Emergency Service Indoor Team Description Paper for FIRA 2024

0

Sign in to get full access
Overview
- This paper describes the design and development of a UAV (Unmanned Aerial Vehicle) system called UruBots, which is intended for indoor air emergency service operations.
- The UruBots system aims to provide a reliable and efficient solution for search and rescue missions, fire monitoring, and other emergency response tasks in indoor environments.
- The paper covers the construction of the UAV, its sensor suite, and the control and navigation algorithms used to enable autonomous operation.
Plain English Explanation
The UruBots paper describes a new type of drone or UAV (Unmanned Aerial Vehicle) that is designed to be used for emergency response and rescue operations inside buildings. The key idea is to create a drone that can fly around indoors, using sensors and smart software, to help with tasks like searching for people, monitoring for fires, and assisting in other emergency situations.
The researchers who developed the UruBots system focused on making it reliable, efficient, and able to operate autonomously without a human pilot. This means the drone can navigate on its own, using cameras and other sensors to understand its surroundings, and then carry out tasks like finding victims or reporting on the status of a fire. The paper explains how the drone is constructed, what kind of sensors it has, and the algorithms that allow it to fly and make decisions independently.
The goal of the UruBots project is to create a valuable tool for first responders and emergency crews, giving them an aerial perspective and capabilities that can be difficult to achieve with ground-based robots or human teams alone. By developing this advanced drone system, the researchers hope to improve the speed and effectiveness of indoor emergency response.
Technical Explanation
The UruBots paper presents the design and development of a UAV system for indoor air emergency service operations. The UAV is equipped with a range of sensors, including RGB-D cameras, IMUs, and laser rangefinders, which enable it to perceive its environment and navigate autonomously.
The control and navigation algorithms used in the UruBots system leverage techniques such as simultaneous localization and mapping (SLAM), path planning, and object detection and tracking. These algorithms allow the UAV to build a 3D map of its surroundings, plan optimal paths, and identify and track relevant objects (e.g., victims, fire sources).
The paper also describes the physical construction of the UAV, which is designed to be lightweight, durable, and able to operate in confined indoor spaces. The UAV is powered by a battery system and uses a modular design to facilitate easy maintenance and customization.
Through simulation and real-world experiments, the researchers demonstrate the UruBots system's ability to navigate indoor environments, locate and track targets, and provide situational awareness to emergency responders. The results suggest that the UruBots system could be a valuable tool for improving the efficiency and effectiveness of indoor emergency response operations.
Critical Analysis
The UruBots paper presents a promising approach to using autonomous UAVs for indoor emergency response, but it also acknowledges several limitations and areas for further research.
One potential limitation is the reliance on GPS-based localization, which may not be reliable in GPS-denied indoor environments. The researchers note that they are exploring alternative localization methods, such as visual-inertial odometry, to address this challenge.
Additionally, the paper does not provide detailed information on the robustness and reliability of the system in real-world emergency scenarios, where factors such as lighting conditions, clutter, and the presence of civilians may introduce additional complexities.
Further research could also explore the integration of the UruBots system with other emergency response technologies, such as ground-based robots or communication systems, to create a more comprehensive and coordinated solution.
Despite these areas for improvement, the UruBots paper represents an important step forward in the development of autonomous UAV systems for indoor emergency response. The researchers have demonstrated the feasibility of the approach and identified key technical challenges that will need to be addressed to realize the full potential of this technology.
Conclusion
The UruBots paper presents a novel UAV system designed for indoor air emergency service operations. The researchers have developed a capable autonomous platform that can navigate, perceive its environment, and assist emergency responders in a variety of indoor scenarios.
While the system still has some limitations, the UruBots paper demonstrates the potential of using advanced drone technology to enhance the speed, efficiency, and effectiveness of indoor emergency response. As the field of autonomous UAVs continues to evolve, the insights and innovations presented in this paper could pave the way for even more sophisticated and impactful emergency response systems in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
UruBots UAV -- Air Emergency Service Indoor Team Description Paper for FIRA 2024
Hiago Sodre, Sebastian Barcelona, Anthony Scirgalea, Brandon Macedo, Gabriel Sampson, Pablo Moraes, William Moraes, Victoria Saravia, Juan Deniz, Bruna Guterres, Andre Kelbouscas, Ricardo Grando
This document addresses the description of the corresponding Urubots Team for the 2024 Fira Air League, Air Emergency Service (Indoor). We introduce our team and an autonomous Unmanned Aerial Vehicle (UAV) that relies on computer vision for its flight control. This UAV has the capability to perform a wide variety of navigation tasks in indoor environments, without requiring the intervention of an external operator or any form of external processing, resulting in a significant decrease in workload and manual dependence. Additionally, our software has been designed to be compatible with the vehicle's structure and for its application to the competition circuit. In this paper, we detail additional aspects about the mechanical structure, software, and application to the FIRA competition.
Read more6/14/2024

0
UruBots Autonomous Cars Team One Description Paper for FIRA 2024
Pablo Moraes, Christopher Peters, Any Da Rosa, Vinicio Melgar, Franco Nu~nez, Maximo Retamar, William Moraes, Victoria Saravia, Hiago Sodre, Sebastian Barcelona, Anthony Scirgalea, Juan Deniz, Bruna Guterres, Andr'e Kelbouscas, Ricardo Grando
This document presents the design of an autonomous car developed by the UruBots team for the 2024 FIRA Autonomous Cars Race Challenge. The project involves creating an RC-car sized electric vehicle capable of navigating race tracks with in an autonomous manner. It integrates mechanical and electronic systems alongside artificial intelligence based algorithms for the navigation and real-time decision-making. The core of our project include the utilization of an AI-based algorithm to learn information from a camera and act in the robot to perform the navigation. We show that by creating a dataset with more than five thousand samples and a five-layered CNN we managed to achieve promissing performance we our proposed hardware setup. Overall, this paper aims to demonstrate the autonomous capabilities of our car, highlighting its readiness for the 2024 FIRA challenge, helping to contribute to the field of autonomous vehicle research.
Read more6/14/2024

0
UruBots Autonomous Car Team Two: Team Description Paper for FIRA 2024
William Moraes, Juan Deniz, Pablo Moraes, Christopher Peters, Vincent Sandin, Gabriel da Silva, Franco Nunez, Maximo Retamar, Victoria Saravia, Hiago Sodre, Sebastian Barcelona, Anthony Scirgalea, Bruna Guterres, Andre Kelbouscas, Ricardo Grando
This paper proposes a mini autonomous car to be used by the team UruBots for the 2024 FIRA Autonomous Cars Race Challenge. The vehicle is proposed focusing on a low cost and light weight setup. Powered by a Raspberry PI4 and with a total weight of 1.15 Kilograms, we show that our vehicle manages to race a track of approximately 13 meters in 11 seconds at the best evaluation that was carried out, with an average speed of 1.2m/s in average. That performance was achieved after training a convolutional neural network with 1500 samples for a total amount of 60 epochs. Overall, we believe that our vehicle are suited to perform at the FIRA Autonomous Cars Race Challenge 2024, helping the development of the field of study and the category in the competition.
Read more6/14/2024
0
Technical Report of Mobile Manipulator Robot for Industrial Environments
Erfan Amoozad Khalili, Kiarash Ghasemzadeh, Hossein Gohari, Mohammadreza Jafari, Matin Jamshidi, Mahdi Khaksar, AmirReza AkramiFard, Mana Hatamzadeh, Saba Sadeghi, Mohammad Hossein Moaiyeri
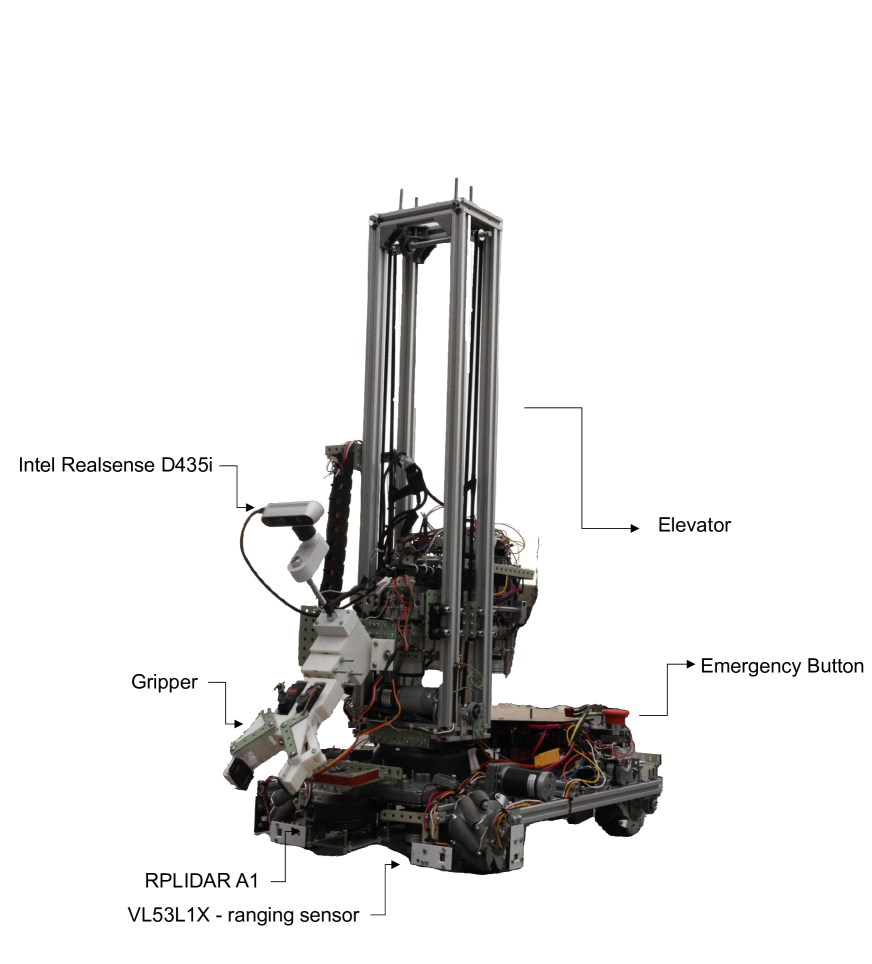
This paper presents the development of the Auriga @Work robot, designed by the Robotics and Intelligent Automation Lab at Shahid Beheshti University, Department of Electrical Engineering, for the RoboCup 2024 competition. The robot is tailored for industrial applications, focusing on enhancing efficiency in repetitive or hazardous environments. It is equipped with a 4-wheel Mecanum drive system for omnidirectional mobility and a 5-degree-of-freedom manipulator arm with a custom 3D-printed gripper for object manipulation and navigation tasks. The robot's electronics are powered by custom-designed boards utilizing ESP32 microcontrollers and an Nvidia Jetson Nano for real-time control and decision-making. The key software stack integrates Hector SLAM for mapping, the A* algorithm for path planning, and YOLO for object detection, along with advanced sensor fusion for improved navigation and collision avoidance.
Read more9/11/2024