UVTM: Universal Vehicle Trajectory Modeling with ST Feature Domain Generation
2402.07232
0
0
✨
Abstract
Vehicle movement is frequently captured in the form of trajectories, i.e., sequences of timestamped locations. Numerous methods exist that target different tasks involving trajectories such as travel-time estimation, trajectory recovery, and trajectory prediction. However, most methods target only one specific task and cannot be applied universally. Existing efforts to create a universal trajectory model often involve adding prediction modules for adapting to different tasks, while also struggle with incomplete or sparse trajectories. To address these shortcomings, we propose the Universal Vehicle Trajectory Model (UVTM) designed to support different tasks based on incomplete or sparse trajectories without the need for retraining or extra prediction modules. To addresses task adaptability on incomplete trajectories, UVTM divide the spatio-temporal features of trajectories into three distinct domains. Each domain can be masked and generated independently to suit the input and output needs of specific tasks. To handle sparse trajectories effectively, UVTM is pre-trained by reconstructing densely sampled trajectories from sparsely sampled ones, allowing it to extract detailed spatio-temporal information from sparse trajectories. Experiments involving three representative trajectory-related tasks on two real-world vehicle trajectory datasets provide insight into the intended properties performance of UVTM and offer evidence that UVTM is capable of meeting its objectives.
Create account to get full access
Overview
- Vehicles frequently have their movements captured as trajectories - sequences of timestamped locations
- Many methods exist for working with trajectories, like estimating travel time, recovering trajectories, and predicting future movements
- Most methods only target a single specific task and cannot be applied universally
- Efforts to create a universal trajectory model often involve adding prediction modules, while also struggling with incomplete or sparse trajectories
Plain English Explanation
Vehicles are often tracked as they move around, with their locations recorded over time to create what's called a "trajectory." There are many different ways researchers have developed to work with these trajectory data, such as estimating how long a trip will take, reconstructing a full trajectory from incomplete data, and predicting where a vehicle will go next.
However, most of these methods are designed for only one specific task and can't be easily adapted to work for other kinds of trajectory analysis. Researchers have tried to create more universal models that can handle multiple tasks, but these often require adding in special "prediction modules" to adapt to each new use case. These universal models also tend to struggle when the trajectory data is incomplete or has missing information.
Technical Explanation
To address these shortcomings, the researchers propose a new "Universal Vehicle Trajectory Model" (UVTM) that is designed to support a variety of trajectory-related tasks, even when working with incomplete or sparse trajectory data. The key innovations of UVTM are:
-
Dividing the spatial and temporal features of trajectories into three distinct "domains" that can be masked and generated independently. This allows the model to be adapted to the specific input and output needs of different tasks.
-
Pre-training UVTM to reconstruct densely sampled trajectories from sparse ones. This helps the model extract detailed spatio-temporal information even from incomplete trajectory data.
The researchers evaluate UVTM on three representative trajectory tasks using real-world vehicle data. The results provide evidence that UVTM can effectively handle incomplete trajectories and support a range of different applications, without the need for retraining or adding specialized prediction modules.
Critical Analysis
The UVTM model proposed in this paper represents an interesting and potentially valuable contribution to the field of trajectory analysis. By designing a more universal model that can adapt to different tasks, the researchers are addressing an important limitation of existing approaches.
However, the paper does not delve deeply into the specific challenges or limitations of UVTM. For example, it's unclear how the model's performance compares to task-specific methods, or how it might scale as the complexity of the trajectories or tasks increases. Additionally, the researchers only evaluate UVTM on vehicle trajectory data, so its applicability to other domains, such as human motion or aerial search, remains to be seen.
Further research and testing would be needed to fully understand the strengths, weaknesses, and broader implications of the UVTM approach. But overall, this paper presents an interesting step towards more unified spatio-temporal representations for trajectory data.
Conclusion
The Universal Vehicle Trajectory Model (UVTM) proposed in this paper represents a novel approach to handling trajectory data that can support a variety of different tasks, even when working with incomplete or sparse trajectory information. By dividing the spatial and temporal features into distinct domains and pre-training on reconstructing dense trajectories from sparse ones, UVTM demonstrates the potential to be a more versatile and adaptable tool for trajectory analysis. While further research is needed to fully understand its capabilities and limitations, this work highlights an important step towards more unified and flexible models for working with movement data.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Deciphering Movement: Unified Trajectory Generation Model for Multi-Agent
Yi Xu, Yun Fu
0
0
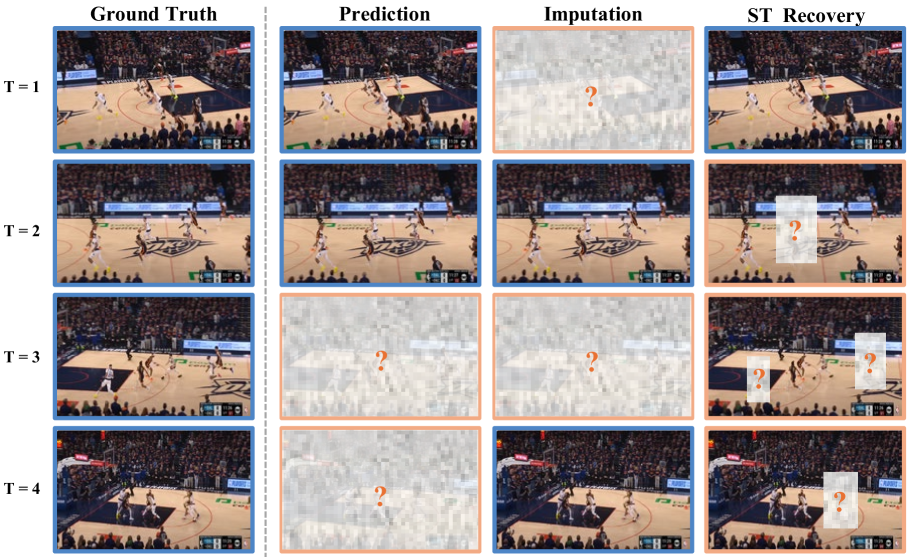
Understanding multi-agent behavior is critical across various fields. The conventional approach involves analyzing agent movements through three primary tasks: trajectory prediction, imputation, and spatial-temporal recovery. Considering the unique input formulation and constraint of these tasks, most existing methods are tailored to address only one specific task. However, in real-world applications, these scenarios frequently occur simultaneously. Consequently, methods designed for one task often fail to adapt to others, resulting in performance drops. To overcome this limitation, we propose a Unified Trajectory Generation model, UniTraj, that processes arbitrary trajectories as masked inputs, adaptable to diverse scenarios. Specifically, we introduce a Ghost Spatial Masking (GSM) module embedded within a Transformer encoder for spatial feature extraction. We further extend recent successful State Space Models (SSMs), particularly the Mamba model, into a Bidirectional Temporal Mamba to effectively capture temporal dependencies. Additionally, we incorporate a Bidirectional Temporal Scaled (BTS) module to comprehensively scan trajectories while maintaining the temporal missing relationships within the sequence. We curate and benchmark three practical sports game datasets, Basketball-U, Football-U, and Soccer-U, for evaluation. Extensive experiments demonstrate the superior performance of our model. To the best of our knowledge, this is the first work that addresses this unified problem through a versatile generative framework, thereby enhancing our understanding of multi-agent movement. Our datasets, code, and model weights are available at https://github.com/colorfulfuture/UniTraj-pytorch.
5/29/2024
📈
UniST: A Prompt-Empowered Universal Model for Urban Spatio-Temporal Prediction
Yuan Yuan, Jingtao Ding, Jie Feng, Depeng Jin, Yong Li
0
0
Urban spatio-temporal prediction is crucial for informed decision-making, such as traffic management, resource optimization, and emergence response. Despite remarkable breakthroughs in pretrained natural language models that enable one model to handle diverse tasks, a universal solution for spatio-temporal prediction remains challenging Existing prediction approaches are typically tailored for specific spatio-temporal scenarios, requiring task-specific model designs and extensive domain-specific training data. In this study, we introduce UniST, a universal model designed for general urban spatio-temporal prediction across a wide range of scenarios. Inspired by large language models, UniST achieves success through: (i) utilizing diverse spatio-temporal data from different scenarios, (ii) effective pre-training to capture complex spatio-temporal dynamics, (iii) knowledge-guided prompts to enhance generalization capabilities. These designs together unlock the potential of building a universal model for various scenarios Extensive experiments on more than 20 spatio-temporal scenarios demonstrate UniST's efficacy in advancing state-of-the-art performance, especially in few-shot and zero-shot prediction. The datasets and code implementation are released on https://github.com/tsinghua-fib-lab/UniST.
7/2/2024

Generalizable Implicit Neural Representation As a Universal Spatiotemporal Traffic Data Learner
Tong Nie, Guoyang Qin, Wei Ma, Jian Sun
0
0
$textbf{This is the conference version of our paper: Spatiotemporal Implicit Neural Representation as a Generalized Traffic Data Learner}$. Spatiotemporal Traffic Data (STTD) measures the complex dynamical behaviors of the multiscale transportation system. Existing methods aim to reconstruct STTD using low-dimensional models. However, they are limited to data-specific dimensions or source-dependent patterns, restricting them from unifying representations. Here, we present a novel paradigm to address the STTD learning problem by parameterizing STTD as an implicit neural representation. To discern the underlying dynamics in low-dimensional regimes, coordinate-based neural networks that can encode high-frequency structures are employed to directly map coordinates to traffic variables. To unravel the entangled spatial-temporal interactions, the variability is decomposed into separate processes. We further enable modeling in irregular spaces such as sensor graphs using spectral embedding. Through continuous representations, our approach enables the modeling of a variety of STTD with a unified input, thereby serving as a generalized learner of the underlying traffic dynamics. It is also shown that it can learn implicit low-rank priors and smoothness regularization from the data, making it versatile for learning different dominating data patterns. We validate its effectiveness through extensive experiments in real-world scenarios, showcasing applications from corridor to network scales. Empirical results not only indicate that our model has significant superiority over conventional low-rank models, but also highlight that the versatility of the approach. We anticipate that this pioneering modeling perspective could lay the foundation for universal representation of STTD in various real-world tasks. $textbf{The full version can be found at:}$ https://doi.org/10.48550/arXiv.2405.03185.
6/14/2024

ULTra-AV: A Unified Longitudinal Trajectory Dataset for Automated Vehicle
Hang Zhou, Ke Ma, Shixiao Liang, Xiaopeng Li, Xiaobo Qu
0
0
Automated Vehicles (AVs) promise significant advances in transportation. Critical to these improvements is understanding AVs' longitudinal behavior, relying heavily on real-world trajectory data. Existing open-source trajectory datasets of AV, however, often fall short in refinement, reliability, and completeness, hindering effective performance metrics analysis and model development. This study addresses these challenges by creating a Unified Longitudinal TRAjectory dataset for AVs (Ultra-AV) to analyze their microscopic longitudinal driving behaviors. This dataset compiles data from 13 distinct sources, encompassing various AV types, test sites, and experiment scenarios. We established a three-step data processing: 1. extraction of longitudinal trajectory data, 2. general data cleaning, and 3. data-specific cleaning to obtain the longitudinal trajectory data and car-following trajectory data. The validity of the processed data is affirmed through performance evaluations across safety, mobility, stability, and sustainability, along with an analysis of the relationships between variables in car-following models. Our work not only furnishes researchers with standardized data and metrics for longitudinal AV behavior studies but also sets guidelines for data collection and model development.
6/4/2024