Virtual Elastic Tether: a New Approach for Multi-agent Navigation in Confined Aquatic Environments

0

Sign in to get full access
Overview
- A new approach for multi-agent navigation in confined aquatic environments, called Virtual Elastic Tether (VET)
- VET uses a virtual tether to coordinate the movement of multiple autonomous underwater vehicles (AUVs)
- Allows AUVs to navigate through tight spaces and obstacles while maintaining cohesion as a team
Plain English Explanation
Virtual Elastic Tether: a New Approach for Multi-agent Navigation in Confined Aquatic Environments proposes a novel method called Virtual Elastic Tether (VET) to coordinate the movement of multiple autonomous underwater vehicles (AUVs) in confined aquatic environments. The key idea is to use a virtual tether, similar to a bungee cord, to connect the AUVs and keep them together as they navigate through tight spaces and around obstacles.
The VET approach allows the AUVs to move independently while maintaining a cohesive team structure. This is especially important in confined aquatic environments, where the vehicles need to be able to maneuver through narrow passages and around objects without getting separated or colliding with each other or the surroundings.
By using the virtual tether, the VET system can dynamically adjust the distance and tension between the AUVs based on the environment and the vehicles' positions. This helps the team navigate through obstacles while staying together and avoiding collisions.
Technical Explanation
The VET approach works by establishing a virtual elastic tether between the AUVs, which acts like a bungee cord to keep them connected. The tether has a desired length and stiffness that can be adjusted based on the environment and the vehicles' positions.
The VET control law uses the virtual tether to generate forces that pull the AUVs together or push them apart, depending on the situation. This allows the vehicles to navigate through tight spaces while maintaining a cohesive team structure.
The paper presents experiments conducted in both simulation and real-world environments to evaluate the performance of the VET system. The results show that VET can effectively coordinate the movement of multiple AUVs in confined aquatic environments, enabling them to navigate through obstacles while staying together as a team.
Critical Analysis
The paper acknowledges some limitations of the VET approach, such as the need for accurate localization and the potential for the virtual tether to become overly stiff in certain situations. Additionally, the paper does not address how the VET system would handle more complex scenarios, such as when the AUVs need to split up and then rejoin, or when there are multiple teams of AUVs operating in the same environment.
Further research could explore ways to optimize the VET control law to handle a wider range of situations and environments, as well as investigate how the system could be extended to support more advanced multi-agent coordination and decision-making.
Conclusion
The Virtual Elastic Tether (VET) approach presents a promising new method for coordinating the movement of multiple autonomous underwater vehicles (AUVs) in confined aquatic environments. By using a virtual tether to keep the AUVs connected and coordinated, the VET system allows the vehicles to navigate through tight spaces and around obstacles while maintaining a cohesive team structure. The experimental results suggest that VET could be a valuable tool for a variety of underwater applications, such as exploration, inspection, and search and rescue operations.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Virtual Elastic Tether: a New Approach for Multi-agent Navigation in Confined Aquatic Environments
Kanzhong Yao, Xueliang Cheng, Keir Groves, Barry Lennox, Ognjen Marjanovic, Simon Watson
Underwater navigation is a challenging area in the field of mobile robotics due to inherent constraints in self-localisation and communication in underwater environments. Some of these challenges can be mitigated by using collaborative multi-agent teams. However, when applied underwater, the robustness of traditional multi-agent collaborative control approaches is highly limited due to the unavailability of reliable measurements. In this paper, the concept of a Virtual Elastic Tether (VET) is introduced in the context of incomplete state measurements, which represents an innovative approach to underwater navigation in confined spaces. The concept of VET is formulated and validated using the Cooperative Aquatic Vehicle Exploration System (CAVES), which is a sim-to-real multi-agent aquatic robotic platform. Within this framework, a vision-based Autonomous Underwater Vehicle-Autonomous Surface Vehicle leader-follower formulation is developed. Experiments were conducted in both simulation and on a physical platform, benchmarked against a traditional Image-Based Visual Servoing approach. Results indicate that the formation of the baseline approach fails under discrete disturbances, when induced distances between the robots exceeds 0.6 m in simulation and 0.3 m in the real world. In contrast, the VET-enhanced system recovers to pre-perturbation distances within 5 seconds. Furthermore, results illustrate the successful navigation of VET-enhanced CAVES in a confined water pond where the baseline approach fails to perform adequately.
Read more8/16/2024
0
New!Fully Distributed Cooperative Multi-agent Underwater Obstacle Avoidance
Kanzhong Yao, Ognjen Marjanovic, Simon Watson
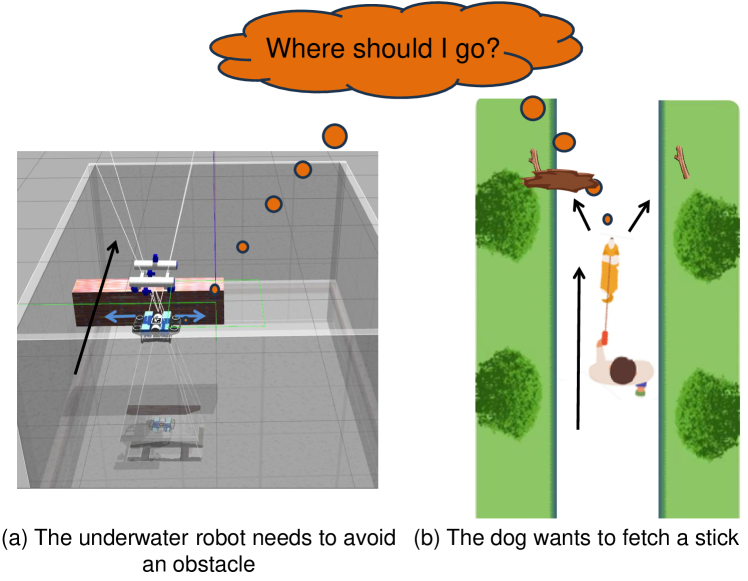
Navigation in cluttered underwater environments is challenging, especially when there are constraints on communication and self-localisation. Part of the fully distributed underwater navigation problem has been resolved by introducing multi-agent robot teams [1], however when the environment becomes cluttered, the problem remains unresolved. In this paper, we first studied the connection between everyday activity of dog walking and the cooperative underwater obstacle avoidance problem. Inspired by this analogy, we propose a novel dog walking paradigm and implement it in a multi-agent underwater system. Simulations were conducted across various scenarios, with performance benchmarked against traditional methods utilising Image-Based Visual Servoing in a multi-agent setup. Results indicate that our dog walking-inspired paradigm significantly enhances cooperative behavior among agents and outperforms the existing approach in navigating through obstacles.
Read more9/18/2024

0
Collaborative Object Manipulation on the Water Surface by a UAV-USV Team Using Tethers
Filip Nov'ak, Tom'av{s} B'av{c}a, Martin Saska
This paper introduces an innovative methodology for object manipulation on the surface of water through the collaboration of an Unmanned Aerial Vehicle (UAV) and an Unmanned Surface Vehicle (USV) connected to the object by tethers. We propose a novel mathematical model of a robotic system that combines the UAV, USV, and the tethered floating object. A novel Model Predictive Control (MPC) framework is designed for using this model to achieve precise control and guidance for this collaborative robotic system. Extensive simulations in the realistic robotic simulator Gazebo demonstrate the system's readiness for real-world deployment, highlighting its versatility and effectiveness. Our multi-robot system overcomes the state-of-the-art single-robot approach, exhibiting smaller control errors during the tracking of the floating object's reference. Additionally, our multi-robot system demonstrates a shorter recovery time from a disturbance compared to the single-robot approach.
Read more7/12/2024

0
USV-AUV Collaboration Framework for Underwater Tasks under Extreme Sea Conditions
Jingzehua Xu, Guanwen Xie, Xinqi Wang, Yiyuan Yang, Shuai Zhang
Autonomous underwater vehicles (AUVs) are valuable for ocean exploration due to their flexibility and ability to carry communication and detection units. Nevertheless, AUVs alone often face challenges in harsh and extreme sea conditions. This study introduces a unmanned surface vehicle (USV)-AUV collaboration framework, which includes high-precision multi-AUV positioning using USV path planning via Fisher information matrix optimization and reinforcement learning for multi-AUV cooperative tasks. Applied to a multi-AUV underwater data collection task scenario, extensive simulations validate the framework's feasibility and superior performance, highlighting exceptional coordination and robustness under extreme sea conditions. The simulation code will be made available as open-source to foster future research in this area.
Read more9/5/2024