Visuo-Tactile Exploration of Unknown Rigid 3D Curvatures by Vision-Augmented Unified Force-Impedance Control

0

Sign in to get full access
Overview
- This paper presents a vision-augmented force-impedance control approach for exploring unknown rigid 3D curvatures through visuo-tactile feedback.
- The system uses a robotic manipulator with a force-sensing end-effector to interact with and explore the surface of an unknown 3D object.
- By integrating visual and tactile information, the robot can build a 3D model of the object's curvature and navigate the surface efficiently.
Plain English Explanation
The researchers developed a robotic system that can explore the surface of unknown 3D objects using both visual and tactile feedback. The robot has a manipulator arm with a force-sensing end-effector that allows it to physically interact with and feel the surface of an object. By combining the visual information from cameras with the tactile data from the force sensors, the robot can build a 3D model of the object's curvature and navigate the surface efficiently.
This is useful for tasks like inspecting and mapping the surface of unknown objects, which could have applications in areas like manufacturing, construction, or search and rescue operations. The vision-augmented force-impedance control approach allows the robot to explore the object's shape safely and effectively, without relying solely on visual data or brute-force physical interaction.
Technical Explanation
The core of the system is a vision-augmented unified force-impedance control approach. This combines force-based impedance control, which regulates the robot's interaction forces and movements, with visual information about the object's 3D shape and curvature.
The researchers first use a camera to obtain a partial 3D point cloud of the object's surface. They then fit a B-spline surface to this point cloud, which provides a smooth, parametric representation of the object's curvature.
During exploration, the robot uses this visual information to plan efficient exploration paths that maximize coverage of the unknown surface. The force-impedance control ensures safe, compliant interaction with the object, while the visual data guides the robot's movements to efficiently map the curvature.
As the robot touches different parts of the object, it updates the 3D surface model and refines its understanding of the curvature. This allows the robot to navigate the surface effectively and explore it thoroughly.
Critical Analysis
The paper presents a well-designed system that demonstrates the benefits of integrating vision and touch for exploring unknown 3D objects. The authors acknowledge that the current approach is limited to rigid objects, and suggest extending it to handle deformable surfaces as an area for future research.
Additionally, the experiments were conducted on relatively simple geometric objects, so further testing on more complex, real-world shapes would be valuable to assess the system's performance and robustness. Integrating the system with higher-level task planning or object recognition capabilities could also expand its potential applications.
Conclusion
This research introduces a novel vision-augmented force-impedance control approach for robotic exploration of unknown 3D curvatures. By combining visual and tactile feedback, the system can efficiently build a 3D model of an object's surface and navigate it safely. The work has promising implications for tasks like object inspection, surface mapping, and manipulation in unstructured environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Visuo-Tactile Exploration of Unknown Rigid 3D Curvatures by Vision-Augmented Unified Force-Impedance Control
Kubra Karacan, Anran Zhang, Hamid Sadeghian, Fan Wu, Sami Haddadin
Despite recent advancements in torque-controlled tactile robots, integrating them into manufacturing settings remains challenging, particularly in complex environments. Simplifying robotic skill programming for non-experts is crucial for increasing robot deployment in manufacturing. This work proposes an innovative approach, Vision-Augmented Unified Force-Impedance Control (VA-UFIC), aimed at intuitive visuo-tactile exploration of unknown 3D curvatures. VA-UFIC stands out by seamlessly integrating vision and tactile data, enabling the exploration of diverse contact shapes in three dimensions, including point contacts, flat contacts with concave and convex curvatures, and scenarios involving contact loss. A pivotal component of our method is a robust online contact alignment monitoring system that considers tactile error, local surface curvature, and orientation, facilitating adaptive adjustments of robot stiffness and force regulation during exploration. We introduce virtual energy tanks within the control framework to ensure safety and stability, effectively addressing inherent safety concerns in visuo-tactile exploration. Evaluation using a Franka Emika research robot demonstrates the efficacy of VA-UFIC in exploring unknown 3D curvatures while adhering to arbitrarily defined force-motion policies. By seamlessly integrating vision and tactile sensing, VA-UFIC offers a promising avenue for intuitive exploration of complex environments, with potential applications spanning manufacturing, inspection, and beyond.
Read more8/27/2024
📉
0
Visuo-Tactile based Predictive Cross Modal Perception for Object Exploration in Robotics
Anirvan Dutta, Etienne Burdet, Mohsen Kaboli
Autonomously exploring the unknown physical properties of novel objects such as stiffness, mass, center of mass, friction coefficient, and shape is crucial for autonomous robotic systems operating continuously in unstructured environments. We introduce a novel visuo-tactile based predictive cross-modal perception framework where initial visual observations (shape) aid in obtaining an initial prior over the object properties (mass). The initial prior improves the efficiency of the object property estimation, which is autonomously inferred via interactive non-prehensile pushing and using a dual filtering approach. The inferred properties are then used to enhance the predictive capability of the cross-modal function efficiently by using a human-inspired `surprise' formulation. We evaluated our proposed framework in the real-robotic scenario, demonstrating superior performance.
Read more5/24/2024
0
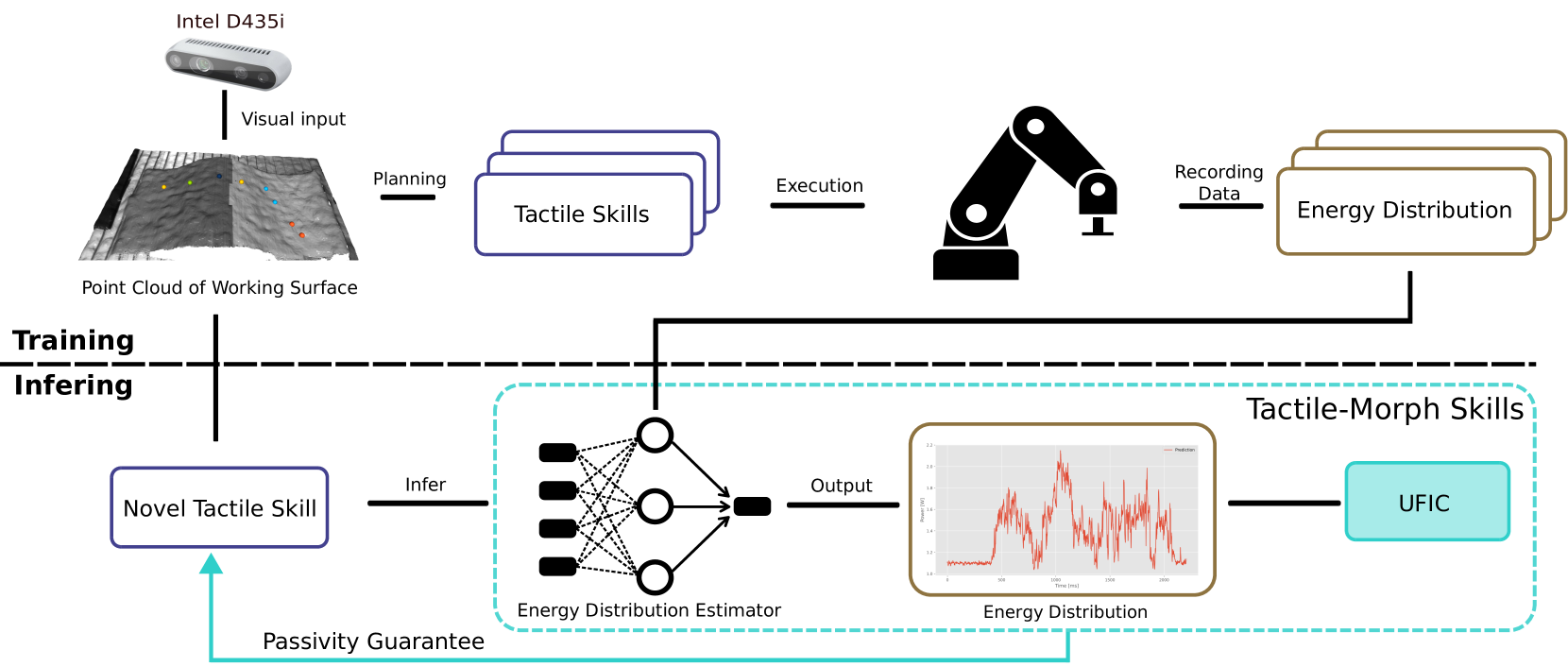
Tactile-Morph Skills: Energy-Based Control Meets Data-Driven Learning
Anran Zhang, Kubra Karacan, Hamid Sadeghian, Yansong Wu, Fan Wu, Sami Haddadin
Robotic manipulation is essential for modernizing factories and automating industrial tasks like polishing, which require advanced tactile abilities. These robots must be easily set up, safely work with humans, learn tasks autonomously, and transfer skills to similar tasks. Addressing these needs, we introduce the tactile-morph skill framework, which integrates unified force-impedance control with data-driven learning. Our system adjusts robot movements and force application based on estimated energy levels for the desired trajectory and force profile, ensuring safety by stopping if energy allocated for the control runs out. Using a Temporal Convolutional Network, we estimate the energy distribution for a given motion and force profile, enabling skill transfer across different tasks and surfaces. Our approach maintains stability and performance even on unfamiliar geometries with similar friction characteristics, demonstrating improved accuracy, zero-shot transferable performance, and enhanced safety in real-world scenarios. This framework promises to enhance robotic capabilities in industrial settings, making intelligent robots more accessible and valuable.
Read more8/26/2024
📈
0
Integrating Visuo-tactile Sensing with Haptic Feedback for Teleoperated Robot Manipulation
Noah Becker, Erik Gattung, Kay Hansel, Tim Schneider, Yaonan Zhu, Yasuhisa Hasegawa, Jan Peters
Telerobotics enables humans to overcome spatial constraints and allows them to physically interact with the environment in remote locations. However, the sensory feedback provided by the system to the operator is often purely visual, limiting the operator's dexterity in manipulation tasks. In this work, we address this issue by equipping the robot's end-effector with high-resolution visuotactile GelSight sensors. Using low-cost MANUS-Gloves, we provide the operator with haptic feedback about forces acting at the points of contact in the form of vibration signals. We propose two different methods for estimating these forces; one based on estimating the movement of markers on the sensor surface and one deep-learning approach. Additionally, we integrate our system into a virtual-reality teleoperation pipeline in which a human operator controls both arms of a Tiago robot while receiving visual and haptic feedback. We believe that integrating haptic feedback is a crucial step for dexterous manipulation in teleoperated robotic systems.
Read more5/1/2024