ViViDex: Learning Vision-based Dexterous Manipulation from Human Videos

0
Sign in to get full access
Overview
- This paper introduces ViViDex, a system that learns dexterous manipulation skills from human demonstration videos.
- ViViDex uses computer vision techniques to extract useful information from the videos, and then trains a reinforcement learning model to mimic the demonstrated behaviors.
- The system is evaluated on various challenging manipulation tasks and shows impressive performance compared to previous approaches.
Plain English Explanation
The researchers developed a system called ViViDex that can learn how to do dexterous, or skilled, hand and arm movements by watching videos of humans performing those actions. This system could help robots and other machines become much better at manipulating objects in the real world.
To do this, ViViDex uses computer vision techniques to analyze the videos and extract important information about the hand and arm movements, as well as the objects being manipulated. This is similar to how humans can learn new skills by observing others.
ViViDex then takes this information and trains a reinforcement learning model - a type of AI that learns by trial and error - to mimic the demonstrated behaviors. The model practices the tasks over and over, refining its movements until it can perform them as skillfully as the human demonstrator.
The researchers tested ViViDex on a variety of challenging manipulation tasks, and found that it was able to match or even exceed the performance of previous approaches. This suggests that ViViDex could be a powerful tool for teaching robots and other machines dexterous manipulation skills.
Technical Explanation
The key innovation of ViViDex is its ability to learn dexterous manipulation skills directly from human demonstration videos. Previous approaches have often relied on specialized hardware, complex control systems, or large datasets of expert demonstrations.
In contrast, ViViDex uses computer vision techniques to extract useful information from the human videos, including the 3D positions and orientations of the hands and objects. This data is then used to train a reinforcement learning model to mimic the demonstrated behaviors.
The reinforcement learning component of ViViDex uses a hierarchical policy architecture, where a high-level policy decides on the overall task to perform, and a low-level policy generates the necessary hand and arm movements. This allows the system to learn complex manipulation skills in a structured and efficient manner.
The researchers evaluated ViViDex on a range of challenging manipulation tasks, including opening jars, pouring liquids, and assembling objects. They found that ViViDex was able to match or exceed the performance of previous state-of-the-art approaches, demonstrating its effectiveness at learning dexterous manipulation skills from human demonstrations.
Critical Analysis
One potential limitation of ViViDex is that it relies on the availability of high-quality human demonstration videos. In real-world settings, such videos may not always be readily available, and the system's performance may be sensitive to the quality and diversity of the training data.
Additionally, while ViViDex shows impressive results on the evaluated tasks, it is unclear how well the learned skills would generalize to novel situations or objects. Further research may be needed to understand the system's ability to adapt to changing environments and task requirements.
Another area for further investigation is the interpretability and transparency of the ViViDex model. As with many deep learning-based systems, it can be challenging to understand the internal decision-making processes of the reinforcement learning component. Improving the interpretability of such models could help build trust and facilitate their real-world deployment.
Conclusion
In summary, the ViViDex system represents an important step forward in the field of vision-based dexterous manipulation. By leveraging human demonstration videos, ViViDex can learn complex manipulation skills without the need for specialized hardware or large datasets of expert demonstrations.
The impressive performance of ViViDex on a range of challenging tasks suggests that this approach could have significant implications for the development of more capable and adaptable robotic systems. Further research and refinement of the system could lead to even more advanced manipulation capabilities, with potential applications in areas such as industrial automation, healthcare, and household assistance.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
ViViDex: Learning Vision-based Dexterous Manipulation from Human Videos
Zerui Chen, Shizhe Chen, Etienne Arlaud, Ivan Laptev, Cordelia Schmid
In this work, we aim to learn a unified vision-based policy for multi-fingered robot hands to manipulate a variety of objects in diverse poses. Though prior work has shown benefits of using human videos for policy learning, performance gains have been limited by the noise in estimated trajectories. Moreover, reliance on privileged object information such as ground-truth object states further limits the applicability in realistic scenarios. To address these limitations, we propose a new framework ViViDex to improve vision-based policy learning from human videos. It first uses reinforcement learning with trajectory guided rewards to train state-based policies for each video, obtaining both visually natural and physically plausible trajectories from the video. We then rollout successful episodes from state-based policies and train a unified visual policy without using any privileged information. We propose coordinate transformation to further enhance the visual point cloud representation, and compare behavior cloning and diffusion policy for the visual policy training. Experiments both in simulation and on the real robot demonstrate that ViViDex outperforms state-of-the-art approaches on three dexterous manipulation tasks.
Read more9/24/2024
0
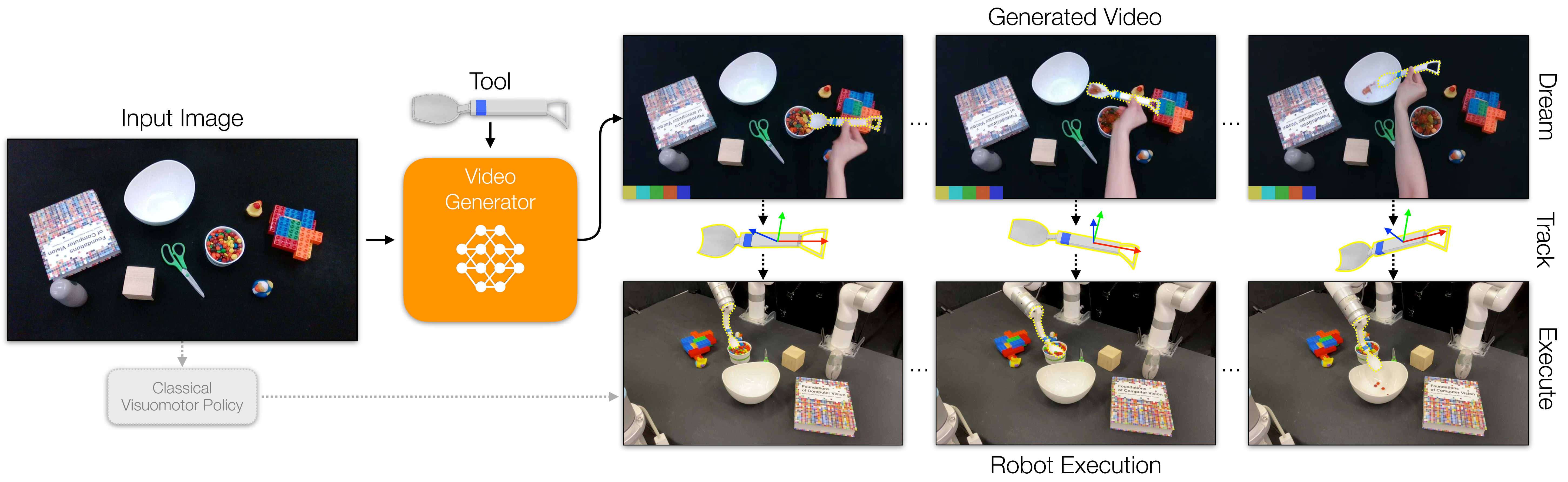
Dreamitate: Real-World Visuomotor Policy Learning via Video Generation
Junbang Liang, Ruoshi Liu, Ege Ozguroglu, Sruthi Sudhakar, Achal Dave, Pavel Tokmakov, Shuran Song, Carl Vondrick
A key challenge in manipulation is learning a policy that can robustly generalize to diverse visual environments. A promising mechanism for learning robust policies is to leverage video generative models, which are pretrained on large-scale datasets of internet videos. In this paper, we propose a visuomotor policy learning framework that fine-tunes a video diffusion model on human demonstrations of a given task. At test time, we generate an example of an execution of the task conditioned on images of a novel scene, and use this synthesized execution directly to control the robot. Our key insight is that using common tools allows us to effortlessly bridge the embodiment gap between the human hand and the robot manipulator. We evaluate our approach on four tasks of increasing complexity and demonstrate that harnessing internet-scale generative models allows the learned policy to achieve a significantly higher degree of generalization than existing behavior cloning approaches.
Read more6/26/2024

0
New!Learning Diverse Bimanual Dexterous Manipulation Skills from Human Demonstrations
Bohan Zhou, Haoqi Yuan, Yuhui Fu, Zongqing Lu
Bimanual dexterous manipulation is a critical yet underexplored area in robotics. Its high-dimensional action space and inherent task complexity present significant challenges for policy learning, and the limited task diversity in existing benchmarks hinders general-purpose skill development. Existing approaches largely depend on reinforcement learning, often constrained by intricately designed reward functions tailored to a narrow set of tasks. In this work, we present a novel approach for efficiently learning diverse bimanual dexterous skills from abundant human demonstrations. Specifically, we introduce BiDexHD, a framework that unifies task construction from existing bimanual datasets and employs teacher-student policy learning to address all tasks. The teacher learns state-based policies using a general two-stage reward function across tasks with shared behaviors, while the student distills the learned multi-task policies into a vision-based policy. With BiDexHD, scalable learning of numerous bimanual dexterous skills from auto-constructed tasks becomes feasible, offering promising advances toward universal bimanual dexterous manipulation. Our empirical evaluation on the TACO dataset, spanning 141 tasks across six categories, demonstrates a task fulfillment rate of 74.59% on trained tasks and 51.07% on unseen tasks, showcasing the effectiveness and competitive zero-shot generalization capabilities of BiDexHD. For videos and more information, visit our project page https://sites.google.com/view/bidexhd.
Read more10/4/2024

0
Vision-based Manipulation from Single Human Video with Open-World Object Graphs
Yifeng Zhu, Arisrei Lim, Peter Stone, Yuke Zhu
We present an object-centric approach to empower robots to learn vision-based manipulation skills from human videos. We investigate the problem of imitating robot manipulation from a single human video in the open-world setting, where a robot must learn to manipulate novel objects from one video demonstration. We introduce ORION, an algorithm that tackles the problem by extracting an object-centric manipulation plan from a single RGB-D video and deriving a policy that conditions on the extracted plan. Our method enables the robot to learn from videos captured by daily mobile devices such as an iPad and generalize the policies to deployment environments with varying visual backgrounds, camera angles, spatial layouts, and novel object instances. We systematically evaluate our method on both short-horizon and long-horizon tasks, demonstrating the efficacy of ORION in learning from a single human video in the open world. Videos can be found in the project website https://ut-austin-rpl.github.io/ORION-release.
Read more5/31/2024