Voice control interface for surgical robot assistants

0

Sign in to get full access
Overview
- This paper describes a voice control interface for surgical robot assistants.
- The system allows surgeons to issue voice commands to control the robot during operations.
- Key goals are to improve efficiency, reduce fatigue, and enhance patient safety during complex procedures.
Plain English Explanation
The researchers have developed a voice-controlled interface for surgical robots. This allows doctors to give spoken commands to control the robot's movements and functions during an operation, rather than having to manually operate the robot.
The main benefits of this system are:
- Improved Efficiency: Doctors can issue voice commands quickly without having to physically manipulate the robot controls, saving time during procedures.
- Reduced Fatigue: Controlling the robot with voice commands is less physically demanding than manual operation, helping prevent surgeon fatigue during long operations.
- Enhanced Safety: By keeping the doctor's hands free, the voice interface enhances their ability to monitor the patient and intervene if needed, improving overall patient safety.
Overall, this voice-controlled robotic system aims to make complex surgical procedures more efficient and safer for both the patient and the surgeon.
Technical Explanation
The paper describes the design and implementation of a voice control interface for a surgical robot assistant. The key technical components include:
- Speech Recognition: The system uses advanced speech recognition algorithms to translate the surgeon's spoken commands into digital control signals for the robot.
- Multimodal Interaction: In addition to voice, the interface also supports other input modes like hand gestures and touch, allowing the surgeon to seamlessly switch between control methods.
- Robot Control Integration: The voice commands are mapped to specific robot functions and movements, enabling the surgeon to direct the robot's actions through speech.
- Contextual Awareness: The system maintains awareness of the current surgical context to enhance the interpretation of voice commands and provide relevant assistance.
Through extensive testing and evaluation, the researchers demonstrate the effectiveness of this voice-controlled robotic system in improving the efficiency and safety of simulated surgical procedures.
Critical Analysis
The paper provides a robust technical approach to integrating voice control capabilities into surgical robot assistants. However, some potential limitations and areas for further research are worth considering:
- Robustness to Noise: The reliability of the speech recognition in a noisy operating room environment is not fully addressed. Exploring noise-resilient techniques could improve the consistency of the voice control.
- Multimodal Coordination: While the interface supports multiple input modalities, the coordination and seamless transition between them could be further refined to optimize the user experience.
- Ethical Considerations: As this technology becomes more advanced, it will be important to carefully consider the ethical implications, such as liability and accountability in case of errors or malfunctions during surgery.
Overall, the research demonstrates a promising step towards enhancing the capabilities of surgical robots through intuitive voice control. Continued advancements in this area have the potential to significantly improve surgical outcomes and patient care.
Conclusion
This paper presents a voice control interface for surgical robot assistants, addressing key challenges around efficiency, fatigue, and safety during complex medical procedures. The technical approach combines speech recognition, multimodal interaction, and contextual awareness to enable surgeons to control the robot through spoken commands.
The findings suggest that this voice-controlled robotic system can enhance the surgeon's ability to focus on the patient and the procedure, while reducing the physical demands of manual robot operation. As the technology continues to evolve, addressing potential limitations and ethical considerations will be crucial to realizing the full benefits of this innovation in the medical field.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Voice control interface for surgical robot assistants
Ana Davila, Jacinto Colan, Yasuhisa Hasegawa
Traditional control interfaces for robotic-assisted minimally invasive surgery impose a significant cognitive load on surgeons. To improve surgical efficiency, surgeon-robot collaboration capabilities, and reduce surgeon burden, we present a novel voice control interface for surgical robotic assistants. Our system integrates Whisper, state-of-the-art speech recognition, within the ROS framework to enable real-time interpretation and execution of voice commands for surgical manipulator control. The proposed system consists of a speech recognition module, an action mapping module, and a robot control module. Experimental results demonstrate the system's high accuracy and inference speed, and demonstrates its feasibility for surgical applications in a tissue triangulation task. Future work will focus on further improving its robustness and clinical applicability.
Read more9/17/2024
0
Towards Intelligent Speech Assistants in Operating Rooms: A Multimodal Model for Surgical Workflow Analysis
Kubilay Can Demir, Belen Lojo Rodriguez, Tobias Weise, Andreas Maier, Seung Hee Yang
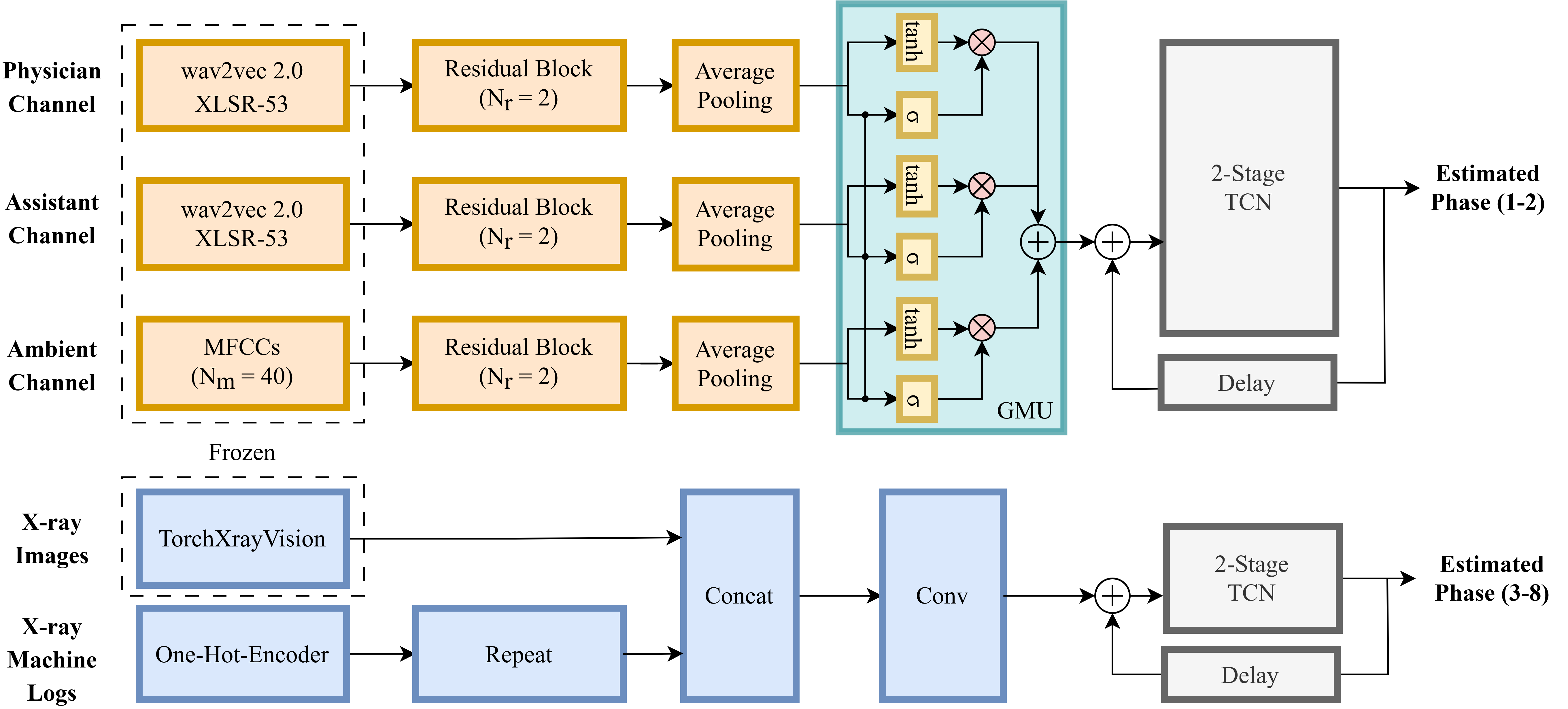
To develop intelligent speech assistants and integrate them seamlessly with intra-operative decision-support frameworks, accurate and efficient surgical phase recognition is a prerequisite. In this study, we propose a multimodal framework based on Gated Multimodal Units (GMU) and Multi-Stage Temporal Convolutional Networks (MS-TCN) to recognize surgical phases of port-catheter placement operations. Our method merges speech and image models and uses them separately in different surgical phases. Based on the evaluation of 28 operations, we report a frame-wise accuracy of 92.65 $pm$ 3.52% and an F1-score of 92.30 $pm$ 3.82%. Our results show approximately 10% improvement in both metrics over previous work and validate the effectiveness of integrating multimodal data for the surgical phase recognition task. We further investigate the contribution of individual data channels by comparing mono-modal models with multimodal models.
Read more6/24/2024
💬
0
Integrating Large Language Models with Multimodal Virtual Reality Interfaces to Support Collaborative Human-Robot Construction Work
Somin Park, Carol C. Menassa, Vineet R. Kamat
In the construction industry, where work environments are complex, unstructured and often dangerous, the implementation of Human-Robot Collaboration (HRC) is emerging as a promising advancement. This underlines the critical need for intuitive communication interfaces that enable construction workers to collaborate seamlessly with robotic assistants. This study introduces a conversational Virtual Reality (VR) interface integrating multimodal interaction to enhance intuitive communication between construction workers and robots. By integrating voice and controller inputs with the Robot Operating System (ROS), Building Information Modeling (BIM), and a game engine featuring a chat interface powered by a Large Language Model (LLM), the proposed system enables intuitive and precise interaction within a VR setting. Evaluated by twelve construction workers through a drywall installation case study, the proposed system demonstrated its low workload and high usability with succinct command inputs. The proposed multimodal interaction system suggests that such technological integration can substantially advance the integration of robotic assistants in the construction industry.
Read more4/5/2024

0
Transforming Surgical Interventions with Embodied Intelligence for Ultrasound Robotics
Huan Xu, Jinlin Wu, Guanglin Cao, Zhen Chen, Zhen Lei, Hongbin Liu
Ultrasonography has revolutionized non-invasive diagnostic methodologies, significantly enhancing patient outcomes across various medical domains. Despite its advancements, integrating ultrasound technology with robotic systems for automated scans presents challenges, including limited command understanding and dynamic execution capabilities. To address these challenges, this paper introduces a novel Ultrasound Embodied Intelligence system that synergistically combines ultrasound robots with large language models (LLMs) and domain-specific knowledge augmentation, enhancing ultrasound robots' intelligence and operational efficiency. Our approach employs a dual strategy: firstly, integrating LLMs with ultrasound robots to interpret doctors' verbal instructions into precise motion planning through a comprehensive understanding of ultrasound domain knowledge, including APIs and operational manuals; secondly, incorporating a dynamic execution mechanism, allowing for real-time adjustments to scanning plans based on patient movements or procedural errors. We demonstrate the effectiveness of our system through extensive experiments, including ablation studies and comparisons across various models, showcasing significant improvements in executing medical procedures from verbal commands. Our findings suggest that the proposed system improves the efficiency and quality of ultrasound scans and paves the way for further advancements in autonomous medical scanning technologies, with the potential to transform non-invasive diagnostics and streamline medical workflows.
Read more6/19/2024