Integrating Large Language Models with Multimodal Virtual Reality Interfaces to Support Collaborative Human-Robot Construction Work
2404.03498
0
0
💬
Abstract
In the construction industry, where work environments are complex, unstructured and often dangerous, the implementation of Human-Robot Collaboration (HRC) is emerging as a promising advancement. This underlines the critical need for intuitive communication interfaces that enable construction workers to collaborate seamlessly with robotic assistants. This study introduces a conversational Virtual Reality (VR) interface integrating multimodal interaction to enhance intuitive communication between construction workers and robots. By integrating voice and controller inputs with the Robot Operating System (ROS), Building Information Modeling (BIM), and a game engine featuring a chat interface powered by a Large Language Model (LLM), the proposed system enables intuitive and precise interaction within a VR setting. Evaluated by twelve construction workers through a drywall installation case study, the proposed system demonstrated its low workload and high usability with succinct command inputs. The proposed multimodal interaction system suggests that such technological integration can substantially advance the integration of robotic assistants in the construction industry.
Create account to get full access
Overview
- The paper explores the integration of Human-Robot Collaboration (HRC) in the complex and dangerous construction industry.
- It introduces a conversational Virtual Reality (VR) interface that enables intuitive communication between construction workers and robotic assistants.
- The proposed system combines voice, controller inputs, Robot Operating System (ROS), Building Information Modeling (BIM), and a Large Language Model (LLM)-powered chat interface within a game engine.
- The system is evaluated by construction workers through a drywall installation case study, demonstrating low workload and high usability.
Plain English Explanation
In the construction industry, where work environments can be complex, unstructured, and often dangerous, the use of robots to assist workers is becoming more common. However, for workers and robots to collaborate effectively, there needs to be an intuitive way for them to communicate.
This study introduces a system that uses virtual reality (VR) to enable construction workers to interact with robots in a more natural way. The system allows workers to give voice commands and use handheld controllers to control the robots, rather than having to use a computer interface.
The system integrates several technologies to make this possible:
- Robot Operating System (ROS): This is a software framework that helps robots understand and respond to commands.
- Building Information Modeling (BIM): This is a way of digitally representing the physical and functional characteristics of a construction project, which can help the robots understand the environment they're working in.
- Large Language Model (LLM): This is a type of artificial intelligence that can understand and generate human-like text, which is used to power a chat interface that allows workers to communicate with the robots.
The researchers tested this system with 12 construction workers who were asked to use it to install drywall. The workers found the system to be easy to use and not overly demanding, suggesting that this type of technology could significantly improve the integration of robots in the construction industry.
Technical Explanation
The paper presents a conversational Virtual Reality (VR) interface that integrates multimodal interaction to enhance intuitive communication between construction workers and robotic assistants. The proposed system combines voice and controller inputs with the Robot Operating System (ROS), Building Information Modeling (BIM), and a game engine featuring a chat interface powered by a Large Language Model (LLM).
The system was evaluated through a drywall installation case study involving 12 construction workers. The results demonstrated the proposed system's low workload and high usability, with participants providing succinct command inputs. This suggests that the integration of such multimodal interaction technology can substantially advance the adoption of robotic assistants in the construction industry.
Critical Analysis
The paper presents a promising approach to enhancing human-robot collaboration in the construction industry, which is known for its complex, unstructured, and often dangerous work environments. The integration of voice, controller inputs, ROS, BIM, and an LLM-powered chat interface within a VR setting appears to provide a more intuitive and effective way for construction workers to communicate with robotic assistants.
However, the study is limited to a single case study involving drywall installation, and further research is needed to evaluate the system's performance across a wider range of construction tasks and environments. Additionally, the paper does not address potential challenges related to the scalability of the system, the integration with existing construction workflows, or the long-term impact on worker safety and productivity.
Future research could also explore the impact of reinforcement learning-driven approaches to improve the adaptability and flexibility of the robotic assistants, as well as the integration of multimodal approaches that combine language, vision, and action to further enhance the intuitive communication between workers and robots.
Conclusion
This study presents a novel conversational VR interface that integrates multimodal interaction to facilitate intuitive communication between construction workers and robotic assistants. The proposed system leverages voice, controller inputs, ROS, BIM, and an LLM-powered chat interface to enable more seamless collaboration in complex construction environments.
The positive evaluation results suggest that such technological integration can substantially advance the adoption of robotic assistants in the construction industry, potentially improving worker safety, productivity, and overall operational efficiency. As the construction industry continues to embrace automation and digitalization, the insights from this research could inform the development of more user-friendly and effective human-robot collaboration solutions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Enhancing Human-Robot Collaborative Assembly in Manufacturing Systems Using Large Language Models
Jonghan Lim, Sujani Patel, Alex Evans, John Pimley, Yifei Li, Ilya Kovalenko
0
0
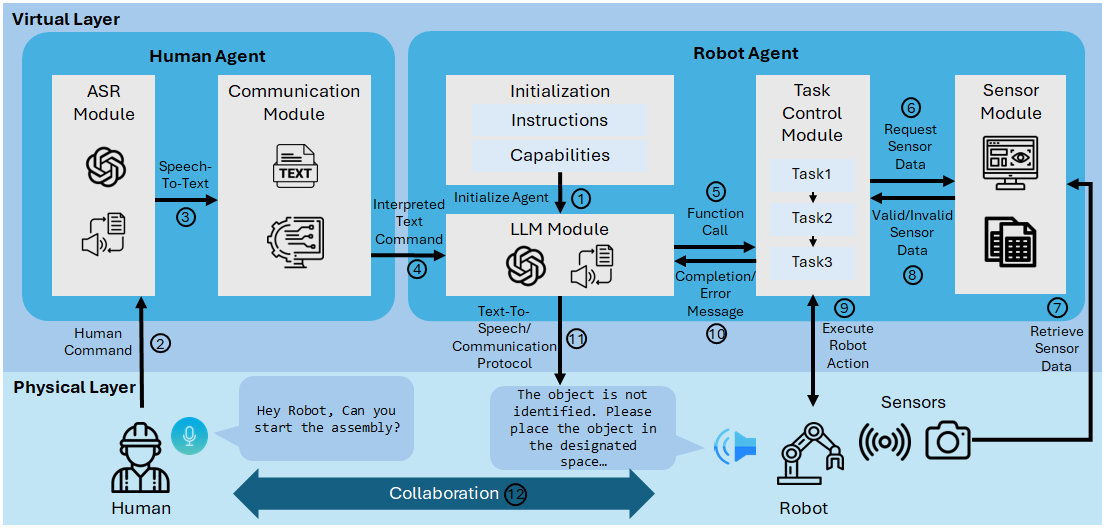
The development of human-robot collaboration has the ability to improve manufacturing system performance by leveraging the unique strengths of both humans and robots. On the shop floor, human operators contribute with their adaptability and flexibility in dynamic situations, while robots provide precision and the ability to perform repetitive tasks. However, the communication gap between human operators and robots limits the collaboration and coordination of human-robot teams in manufacturing systems. Our research presents a human-robot collaborative assembly framework that utilizes a large language model for enhancing communication in manufacturing environments. The framework facilitates human-robot communication by integrating voice commands through natural language for task management. A case study for an assembly task demonstrates the framework's ability to process natural language inputs and address real-time assembly challenges, emphasizing adaptability to language variation and efficiency in error resolution. The results suggest that large language models have the potential to improve human-robot interaction for collaborative manufacturing assembly applications.
6/24/2024
LaMI: Large Language Models for Multi-Modal Human-Robot Interaction
Chao Wang, Stephan Hasler, Daniel Tanneberg, Felix Ocker, Frank Joublin, Antonello Ceravola, Joerg Deigmoeller, Michael Gienger
0
0
This paper presents an innovative large language model (LLM)-based robotic system for enhancing multi-modal human-robot interaction (HRI). Traditional HRI systems relied on complex designs for intent estimation, reasoning, and behavior generation, which were resource-intensive. In contrast, our system empowers researchers and practitioners to regulate robot behavior through three key aspects: providing high-level linguistic guidance, creating atomic actions and expressions the robot can use, and offering a set of examples. Implemented on a physical robot, it demonstrates proficiency in adapting to multi-modal inputs and determining the appropriate manner of action to assist humans with its arms, following researchers' defined guidelines. Simultaneously, it coordinates the robot's lid, neck, and ear movements with speech output to produce dynamic, multi-modal expressions. This showcases the system's potential to revolutionize HRI by shifting from conventional, manual state-and-flow design methods to an intuitive, guidance-based, and example-driven approach. Supplementary material can be found at https://hri-eu.github.io/Lami/
4/12/2024
New!When Robots Get Chatty: Grounding Multimodal Human-Robot Conversation and Collaboration
Philipp Allgeuer, Hassan Ali, Stefan Wermter
0
0
We investigate the use of Large Language Models (LLMs) to equip neural robotic agents with human-like social and cognitive competencies, for the purpose of open-ended human-robot conversation and collaboration. We introduce a modular and extensible methodology for grounding an LLM with the sensory perceptions and capabilities of a physical robot, and integrate multiple deep learning models throughout the architecture in a form of system integration. The integrated models encompass various functions such as speech recognition, speech generation, open-vocabulary object detection, human pose estimation, and gesture detection, with the LLM serving as the central text-based coordinating unit. The qualitative and quantitative results demonstrate the huge potential of LLMs in providing emergent cognition and interactive language-oriented control of robots in a natural and social manner.
7/2/2024
📈
Enhancing the LLM-Based Robot Manipulation Through Human-Robot Collaboration
Haokun Liu, Yaonan Zhu, Kenji Kato, Atsushi Tsukahara, Izumi Kondo, Tadayoshi Aoyama, Yasuhisa Hasegawa
0
0
Large Language Models (LLMs) are gaining popularity in the field of robotics. However, LLM-based robots are limited to simple, repetitive motions due to the poor integration between language models, robots, and the environment. This paper proposes a novel approach to enhance the performance of LLM-based autonomous manipulation through Human-Robot Collaboration (HRC). The approach involves using a prompted GPT-4 language model to decompose high-level language commands into sequences of motions that can be executed by the robot. The system also employs a YOLO-based perception algorithm, providing visual cues to the LLM, which aids in planning feasible motions within the specific environment. Additionally, an HRC method is proposed by combining teleoperation and Dynamic Movement Primitives (DMP), allowing the LLM-based robot to learn from human guidance. Real-world experiments have been conducted using the Toyota Human Support Robot for manipulation tasks. The outcomes indicate that tasks requiring complex trajectory planning and reasoning over environments can be efficiently accomplished through the incorporation of human demonstrations.
7/2/2024