VPOcc: Exploiting Vanishing Point for Monocular 3D Semantic Occupancy Prediction

0

Sign in to get full access
Overview
- Presents a novel method called VPOcc for 3D semantic occupancy prediction using a monocular camera
- Leverages vanishing point information to improve depth estimation and semantic segmentation
- Demonstrates state-of-the-art performance on several datasets
Plain English Explanation
The paper introduces VPOcc, a new approach for predicting the 3D structure and semantic content of a scene using only a single camera. Traditional methods for 3D scene understanding often require specialized hardware like depth sensors, but VPOcc can achieve high-quality results using just a regular monocular camera.
The key insight behind VPOcc is the use of vanishing point information. Vanishing points are the locations in an image where parallel lines in the real world appear to converge. By detecting these vanishing points, VPOcc can infer valuable information about the 3D geometry of the scene, which it then leverages to improve both depth estimation and semantic segmentation.
For example, knowing the location of the vanishing points can help VPOcc better estimate the depth of objects at different distances from the camera. This depth information is then used to more accurately predict the 3D occupancy of the scene, including the locations and extents of different objects and structures.
Similarly, the vanishing point cues also aid the semantic segmentation process, helping VPOcc to better distinguish between different types of objects and surfaces in the scene. By combining these two capabilities - depth estimation and semantic segmentation - VPOcc is able to produce a rich, 3D understanding of the environment from a single 2D image.
The paper demonstrates that VPOcc outperforms previous state-of-the-art methods on several benchmark datasets, showcasing the power of leveraging vanishing point information for monocular 3D scene understanding.
Technical Explanation
The VPOcc architecture consists of two main components: a Vanishing Point Estimator and a 3D Semantic Occupancy Predictor.
The Vanishing Point Estimator takes a monocular image as input and predicts the locations of the three dominant vanishing points in the scene. This is accomplished using a neural network trained on datasets of images labeled with ground truth vanishing point annotations.
The predicted vanishing points are then fed into the 3D Semantic Occupancy Predictor, which uses this information to improve its depth estimation and semantic segmentation capabilities. Specifically, the vanishing point cues are incorporated into both the encoder and decoder of a U-Net-style architecture, enabling the model to better reason about the 3D structure and semantic content of the scene.
The 3D Semantic Occupancy Predictor outputs a 3D occupancy grid, where each voxel is labeled with a semantic class (e.g. "road", "building", "car"). This grid represents the model's understanding of the 3D layout and composition of the scene.
The authors evaluate VPOcc on several benchmark datasets for monocular 3D scene understanding, including NYUv2, ScanNet, and SUN RGB-D. They demonstrate that VPOcc outperforms previous state-of-the-art methods on a range of metrics, including 3D semantic segmentation accuracy and 3D occupancy prediction quality.
Critical Analysis
The paper makes a compelling case for the value of leveraging vanishing point information for monocular 3D scene understanding. The VPOcc approach represents a significant advance over previous methods that relied solely on raw image data.
That said, the authors acknowledge several limitations of their work. First, the Vanishing Point Estimator component relies on having ground truth vanishing point annotations during training, which may not always be available. The authors suggest exploring self-supervised vanishing point detection as a potential solution.
Additionally, the 3D occupancy grid representation used by VPOcc may not be the most efficient or scalable way to model large, complex scenes. The authors note that incorporating techniques like sparse voxel representation or hierarchical modeling could help address this issue.
Finally, while VPOcc demonstrates state-of-the-art performance on the benchmarks considered, it would be valuable to evaluate its real-world applicability in domains like autonomous driving or robotic navigation, where 3D scene understanding is a crucial capability.
Overall, the VPOcc method represents an important step forward in monocular 3D scene understanding, and the authors' insights on the value of vanishing point information are likely to inspire further research in this direction.
Conclusion
The VPOcc paper presents a novel approach for leveraging vanishing point information to improve monocular 3D semantic occupancy prediction. By incorporating vanishing point cues into both depth estimation and semantic segmentation, the model is able to achieve state-of-the-art performance on several benchmark datasets.
While the method has some limitations, the core idea of exploiting vanishing point information for 3D scene understanding is a promising direction that could lead to significant advances in areas like autonomous navigation, robotic perception, and mixed reality applications. The paper serves as an inspiring example of how careful incorporation of geometric priors can enhance the capabilities of deep learning-based computer vision systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
VPOcc: Exploiting Vanishing Point for Monocular 3D Semantic Occupancy Prediction
Junsu Kim, Junhee Lee, Ukcheol Shin, Jean Oh, Kyungdon Joo
Monocular 3D semantic occupancy prediction is becoming important in robot vision due to the compactness of using a single RGB camera. However, existing methods often do not adequately account for camera perspective geometry, resulting in information imbalance along the depth range of the image. To address this issue, we propose a vanishing point (VP) guided monocular 3D semantic occupancy prediction framework named VPOcc. Our framework consists of three novel modules utilizing VP. First, in the VPZoomer module, we initially utilize VP in feature extraction to achieve information balanced feature extraction across the scene by generating a zoom-in image based on VP. Second, we perform perspective geometry-aware feature aggregation by sampling points towards VP using a VP-guided cross-attention (VPCA) module. Finally, we create an information-balanced feature volume by effectively fusing original and zoom-in voxel feature volumes with a balanced feature volume fusion (BVFV) module. Experiments demonstrate that our method achieves state-of-the-art performance for both IoU and mIoU on SemanticKITTI and SSCBench-KITTI360. These results are obtained by effectively addressing the information imbalance in images through the utilization of VP. Our code will be available at www.github.com/anonymous.
Read more8/9/2024

0
Vanishing-Point-Guided Video Semantic Segmentation of Driving Scenes
Diandian Guo, Deng-Ping Fan, Tongyu Lu, Christos Sakaridis, Luc Van Gool
The estimation of implicit cross-frame correspondences and the high computational cost have long been major challenges in video semantic segmentation (VSS) for driving scenes. Prior works utilize keyframes, feature propagation, or cross-frame attention to address these issues. By contrast, we are the first to harness vanishing point (VP) priors for more effective segmentation. Intuitively, objects near VPs (i.e., away from the vehicle) are less discernible. Moreover, they tend to move radially away from the VP over time in the usual case of a forward-facing camera, a straight road, and linear forward motion of the vehicle. Our novel, efficient network for VSS, named VPSeg, incorporates two modules that utilize exactly this pair of static and dynamic VP priors: sparse-to-dense feature mining (DenseVP) and VP-guided motion fusion (MotionVP). MotionVP employs VP-guided motion estimation to establish explicit correspondences across frames and help attend to the most relevant features from neighboring frames, while DenseVP enhances weak dynamic features in distant regions around VPs. These modules operate within a context-detail framework, which separates contextual features from high-resolution local features at different input resolutions to reduce computational costs. Contextual and local features are integrated through contextualized motion attention (CMA) for the final prediction. Extensive experiments on two popular driving segmentation benchmarks, Cityscapes and ACDC, demonstrate that VPSeg outperforms previous SOTA methods, with only modest computational overhead.
Read more4/29/2024
0
Unified Spatio-Temporal Tri-Perspective View Representation for 3D Semantic Occupancy Prediction
Sathira Silva, Savindu Bhashitha Wannigama, Gihan Jayatilaka, Muhammad Haris Khan, Roshan Ragel
Holistic understanding and reasoning in 3D scenes play a vital role in the success of autonomous driving systems. The evolution of 3D semantic occupancy prediction as a pretraining task for autonomous driving and robotic downstream tasks capture finer 3D details compared to methods like 3D detection. Existing approaches predominantly focus on spatial cues such as tri-perspective view embeddings (TPV), often overlooking temporal cues. This study introduces a spatiotemporal transformer architecture S2TPVFormer for temporally coherent 3D semantic occupancy prediction. We enrich the prior process by including temporal cues using a novel temporal cross-view hybrid attention mechanism (TCVHA) and generate spatiotemporal TPV embeddings (i.e. S2TPV embeddings). Experimental evaluations on the nuScenes dataset demonstrate a substantial 4.1% improvement in mean Intersection over Union (mIoU) for 3D Semantic Occupancy compared to TPVFormer, confirming the effectiveness of the proposed S2TPVFormer in enhancing 3D scene perception.
Read more4/5/2024
0
SparseOcc: Rethinking Sparse Latent Representation for Vision-Based Semantic Occupancy Prediction
Pin Tang, Zhongdao Wang, Guoqing Wang, Jilai Zheng, Xiangxuan Ren, Bailan Feng, Chao Ma
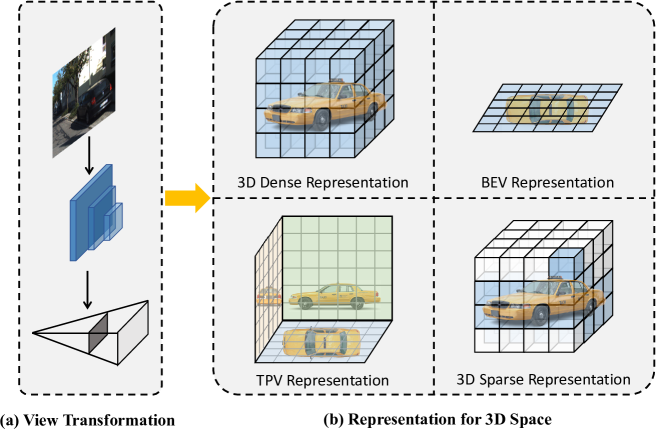
Vision-based perception for autonomous driving requires an explicit modeling of a 3D space, where 2D latent representations are mapped and subsequent 3D operators are applied. However, operating on dense latent spaces introduces a cubic time and space complexity, which limits scalability in terms of perception range or spatial resolution. Existing approaches compress the dense representation using projections like Bird's Eye View (BEV) or Tri-Perspective View (TPV). Although efficient, these projections result in information loss, especially for tasks like semantic occupancy prediction. To address this, we propose SparseOcc, an efficient occupancy network inspired by sparse point cloud processing. It utilizes a lossless sparse latent representation with three key innovations. Firstly, a 3D sparse diffuser performs latent completion using spatially decomposed 3D sparse convolutional kernels. Secondly, a feature pyramid and sparse interpolation enhance scales with information from others. Finally, the transformer head is redesigned as a sparse variant. SparseOcc achieves a remarkable 74.9% reduction on FLOPs over the dense baseline. Interestingly, it also improves accuracy, from 12.8% to 14.1% mIOU, which in part can be attributed to the sparse representation's ability to avoid hallucinations on empty voxels.
Read more4/16/2024