What model does MuZero learn?

0
📈
Sign in to get full access
Overview
- Model-based reinforcement learning has gained attention for its potential to improve sample efficiency.
- Deep learning can be used to learn compact models from complex sensor data.
- However, the effectiveness of these learned models, particularly their ability to plan and improve the current policy, is unclear.
Plain English Explanation
Reinforcement learning is a type of machine learning where an agent learns to make decisions by interacting with an environment and receiving rewards or punishments. Traditional reinforcement learning algorithms can be sample-inefficient, meaning they require a lot of data to learn.
Model-based reinforcement learning aims to address this by learning a model of the environment, which can then be used to plan and make better decisions. When deep learning is used to learn these models, it may be possible to learn compact representations from complex sensor data, like images or sounds.
However, the researchers in this paper were interested in understanding how well these learned models actually work for planning and improving the agent's decision-making policy. They studied a well-known model-based reinforcement learning algorithm called MuZero to see how well it achieved its goal of learning a value-equivalent model, and how useful that model was for actually improving the agent's policy.
Technical Explanation
The paper examines the MuZero algorithm, a deep model-based reinforcement learning method. MuZero aims to learn a compact model of the environment that can be used for planning and improving the agent's policy.
The researchers analyzed how well MuZero achieved its goal of learning a value-equivalent model, meaning a model that can accurately predict the expected future rewards for different actions. They also explored how useful the learned model was for actually improving the agent's current policy through planning.
The paper presents various insights from their analysis, including the finding that the model learned by MuZero cannot effectively generalize to evaluate unseen policies. This limits the extent to which the model can be used to further improve the agent's policy beyond what was learned through direct interaction with the environment.
Critical Analysis
The paper raises important questions about the limitations of the learned models in model-based reinforcement learning algorithms like MuZero. While these algorithms can learn compact representations of complex environments, the researchers found that the models may not be as useful for planning and policy improvement as hoped.
One key limitation is the lack of generalization to unseen policies. This suggests that the models learned by MuZero may be overly tied to the specific policy they were trained on, rather than capturing a more general understanding of the environment dynamics.
The paper also does not delve into the reasons behind this lack of generalization. Further research is needed to understand the factors that influence a model's capacity for planning and policy improvement, and how to design algorithms that can learn models better suited for these tasks.
Conclusion
This paper provides a critical examination of the effectiveness of the models learned by the MuZero model-based reinforcement learning algorithm. While MuZero and similar approaches hold promise for improving sample efficiency, the researchers found that the learned models have limitations in their ability to generalize and effectively plan to improve the agent's policy.
These insights highlight the need for continued research to better understand the capabilities and limitations of model-based reinforcement learning, and to develop algorithms that can learn models that are truly useful for planning and decision-making. As the field of AI continues to evolve, addressing these challenges will be crucial for realizing the full potential of model-based reinforcement learning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📈
0
What model does MuZero learn?
Jinke He, Thomas M. Moerland, Joery A. de Vries, Frans A. Oliehoek
Model-based reinforcement learning has drawn considerable interest in recent years, given its promise to improve sample efficiency. Moreover, when using deep-learned models, it is potentially possible to learn compact models from complex sensor data. However, the effectiveness of these learned models, particularly their capacity to plan, i.e., to improve the current policy, remains unclear. In this work, we study MuZero, a well-known deep model-based reinforcement learning algorithm, and explore how far it achieves its learning objective of a value-equivalent model and how useful the learned models are for policy improvement. Amongst various other insights, we conclude that the model learned by MuZero cannot effectively generalize to evaluate unseen policies, which limits the extent to which we can additionally improve the current policy by planning with the model.
Read more8/20/2024

0
UniZero: Generalized and Efficient Planning with Scalable Latent World Models
Yuan Pu, Yazhe Niu, Jiyuan Ren, Zhenjie Yang, Hongsheng Li, Yu Liu
Learning predictive world models is essential for enhancing the planning capabilities of reinforcement learning agents. Notably, the MuZero-style algorithms, based on the value equivalence principle and Monte Carlo Tree Search (MCTS), have achieved superhuman performance in various domains. However, in environments that require capturing long-term dependencies, MuZero's performance deteriorates rapidly. We identify that this is partially due to the textit{entanglement} of latent representations with historical information, which results in incompatibility with the auxiliary self-supervised state regularization. To overcome this limitation, we present textit{UniZero}, a novel approach that textit{disentangles} latent states from implicit latent history using a transformer-based latent world model. By concurrently predicting latent dynamics and decision-oriented quantities conditioned on the learned latent history, UniZero enables joint optimization of the long-horizon world model and policy, facilitating broader and more efficient planning in latent space. We demonstrate that UniZero, even with single-frame inputs, matches or surpasses the performance of MuZero-style algorithms on the Atari 100k benchmark. Furthermore, it significantly outperforms prior baselines in benchmarks that require long-term memory. Lastly, we validate the effectiveness and scalability of our design choices through extensive ablation studies, visual analyses, and multi-task learning results. The code is available at textcolor{magenta}{https://github.com/opendilab/LightZero}.
Read more6/18/2024
0
Efficient Multi-agent Reinforcement Learning by Planning
Qihan Liu, Jianing Ye, Xiaoteng Ma, Jun Yang, Bin Liang, Chongjie Zhang
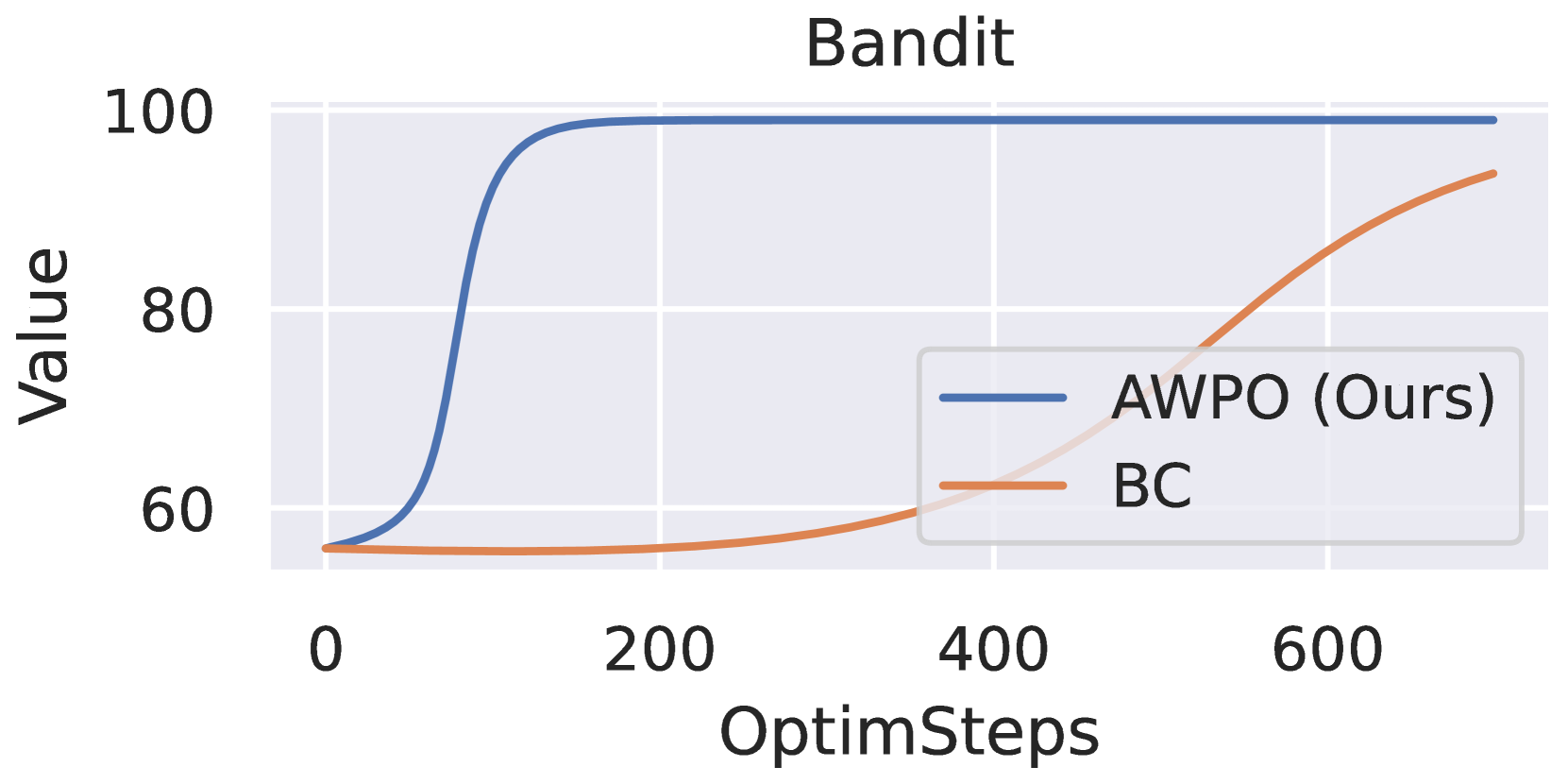
Multi-agent reinforcement learning (MARL) algorithms have accomplished remarkable breakthroughs in solving large-scale decision-making tasks. Nonetheless, most existing MARL algorithms are model-free, limiting sample efficiency and hindering their applicability in more challenging scenarios. In contrast, model-based reinforcement learning (MBRL), particularly algorithms integrating planning, such as MuZero, has demonstrated superhuman performance with limited data in many tasks. Hence, we aim to boost the sample efficiency of MARL by adopting model-based approaches. However, incorporating planning and search methods into multi-agent systems poses significant challenges. The expansive action space of multi-agent systems often necessitates leveraging the nearly-independent property of agents to accelerate learning. To tackle this issue, we propose the MAZero algorithm, which combines a centralized model with Monte Carlo Tree Search (MCTS) for policy search. We design a novel network structure to facilitate distributed execution and parameter sharing. To enhance search efficiency in deterministic environments with sizable action spaces, we introduce two novel techniques: Optimistic Search Lambda (OS($lambda$)) and Advantage-Weighted Policy Optimization (AWPO). Extensive experiments on the SMAC benchmark demonstrate that MAZero outperforms model-free approaches in terms of sample efficiency and provides comparable or better performance than existing model-based methods in terms of both sample and computational efficiency. Our code is available at https://github.com/liuqh16/MAZero.
Read more5/21/2024

0
Robot Utility Models: General Policies for Zero-Shot Deployment in New Environments
Haritheja Etukuru, Norihito Naka, Zijin Hu, Seungjae Lee, Julian Mehu, Aaron Edsinger, Chris Paxton, Soumith Chintala, Lerrel Pinto, Nur Muhammad Mahi Shafiullah
Robot models, particularly those trained with large amounts of data, have recently shown a plethora of real-world manipulation and navigation capabilities. Several independent efforts have shown that given sufficient training data in an environment, robot policies can generalize to demonstrated variations in that environment. However, needing to finetune robot models to every new environment stands in stark contrast to models in language or vision that can be deployed zero-shot for open-world problems. In this work, we present Robot Utility Models (RUMs), a framework for training and deploying zero-shot robot policies that can directly generalize to new environments without any finetuning. To create RUMs efficiently, we develop new tools to quickly collect data for mobile manipulation tasks, integrate such data into a policy with multi-modal imitation learning, and deploy policies on-device on Hello Robot Stretch, a cheap commodity robot, with an external mLLM verifier for retrying. We train five such utility models for opening cabinet doors, opening drawers, picking up napkins, picking up paper bags, and reorienting fallen objects. Our system, on average, achieves 90% success rate in unseen, novel environments interacting with unseen objects. Moreover, the utility models can also succeed in different robot and camera set-ups with no further data, training, or fine-tuning. Primary among our lessons are the importance of training data over training algorithm and policy class, guidance about data scaling, necessity for diverse yet high-quality demonstrations, and a recipe for robot introspection and retrying to improve performance on individual environments. Our code, data, models, hardware designs, as well as our experiment and deployment videos are open sourced and can be found on our project website: https://robotutilitymodels.com
Read more9/10/2024