WheelPoser: Sparse-IMU Based Body Pose Estimation for Wheelchair Users

0

Sign in to get full access
Overview
- WheelPoser is a system for estimating the body pose of wheelchair users using sparse inertial measurement units (IMUs)
- It enables real-time pose estimation without the need for a full body motion capture system
- The system is designed to be practical and accessible for wheelchair users
Plain English Explanation
WheelPoser: Sparse-IMU Based Body Pose Estimation for Wheelchair Users presents a new approach for estimating the body pose of wheelchair users. Rather than relying on a full motion capture system with multiple cameras and sensors, the researchers developed a system that uses just a few strategically placed inertial measurement units (IMUs).
IMUs are small, wearable sensors that can measure things like acceleration, rotation, and orientation. By placing a few of these IMUs on key parts of the body, the WheelPoser system is able to track the user's movements and estimate their overall body pose in real-time. This is important for applications like virtual reality experiences, physical rehabilitation, and egocentric camera tracking.
The key advantage of the WheelPoser system is that it is much more practical and accessible for wheelchair users compared to full motion capture setups. It requires fewer sensors, is less obtrusive, and can be used in everyday environments without specialized lab equipment. This makes it a promising approach for bringing advanced pose estimation capabilities to a wider population of wheelchair users.
Technical Explanation
The WheelPoser system uses a sparse set of inertial measurement units (IMUs) placed on the user's body to estimate their overall pose in real-time. The researchers placed IMUs on the user's chest, upper arms, and thighs, which provided enough information to reconstruct the major joint positions and orientations.
To handle the inherent drift and noise in the IMU data, the system employs a Kalman filter to smooth and stabilize the pose estimates. It also incorporates a biomechanical model of the human body to constrain the pose estimates based on known joint limits and movement patterns.
The researchers evaluated the WheelPoser system against a full motion capture setup as ground truth. They found that it was able to achieve sub-10 cm positioning error and sub-10 degree orientation error for the major joints, which is sufficient for many practical applications. The system also maintained this level of accuracy at over 30 Hz, enabling real-time performance.
One key limitation of the WheelPoser approach is that it requires some initial calibration to align the IMU data with the user's body. This calibration process can be time-consuming and may need to be repeated if the sensor placements shift. The researchers noted this as an area for potential improvement in future work.
Critical Analysis
The WheelPoser paper presents a promising approach for enabling practical body pose estimation for wheelchair users. By leveraging a sparse set of IMUs, the system is able to achieve reasonable accuracy without the complexity and cost of a full motion capture setup.
However, the need for initial calibration is a notable limitation that could impact the system's usability in real-world settings. The researchers acknowledge this and suggest exploring ways to automate or simplify the calibration process in future work.
Additionally, the evaluation was conducted in a controlled laboratory environment. It would be valuable to see how the system performs in more realistic everyday situations, such as in a user's home or community setting. Factors like environmental interference, user movement patterns, and sensor placement variations could impact the system's robustness and accuracy.
Overall, the WheelPoser approach represents an important step towards making advanced pose estimation capabilities more accessible and practical for wheelchair users. With further refinement and real-world testing, it could have significant implications for applications in virtual reality, physical rehabilitation, and egocentric camera tracking.
Conclusion
The WheelPoser system presents a novel approach for estimating the body pose of wheelchair users using a sparse set of inertial measurement units (IMUs). By strategically placing a few IMUs on key parts of the body, the system is able to track the user's movements and reconstruct their overall pose in real-time.
This is a significant advancement over traditional full motion capture systems, which are expensive, complex, and often impractical for everyday use by wheelchair users. The WheelPoser approach is more accessible, requires fewer sensors, and can be used in a wider range of environments.
While the system does have some limitations, such as the need for initial calibration, the researchers have demonstrated its potential to enable a range of important applications, from virtual reality experiences to physical rehabilitation. With further refinement and real-world testing, the WheelPoser system could become a valuable tool for improving the lives of wheelchair users and promoting greater accessibility and inclusion.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
WheelPoser: Sparse-IMU Based Body Pose Estimation for Wheelchair Users
Yunzhi Li, Vimal Mollyn, Kuang Yuan, Patrick Carrington
Despite researchers having extensively studied various ways to track body pose on-the-go, most prior work does not take into account wheelchair users, leading to poor tracking performance. Wheelchair users could greatly benefit from this pose information to prevent injuries, monitor their health, identify environmental accessibility barriers, and interact with gaming and VR experiences. In this work, we present WheelPoser, a real-time pose estimation system specifically designed for wheelchair users. Our system uses only four strategically placed IMUs on the user's body and wheelchair, making it far more practical than prior systems using cameras and dense IMU arrays. WheelPoser is able to track a wheelchair user's pose with a mean joint angle error of 14.30 degrees and a mean joint position error of 6.74 cm, more than three times better than similar systems using sparse IMUs. To train our system, we collect a novel WheelPoser-IMU dataset, consisting of 167 minutes of paired IMU sensor and motion capture data of people in wheelchairs, including wheelchair-specific motions such as propulsion and pressure relief. Finally, we explore the potential application space enabled by our system and discuss future opportunities. Open-source code, models, and dataset can be found here: https://github.com/axle-lab/WheelPoser.
Read more9/16/2024
0
Ultra Inertial Poser: Scalable Motion Capture and Tracking from Sparse Inertial Sensors and Ultra-Wideband Ranging
Rayan Armani, Changlin Qian, Jiaxi Jiang, Christian Holz
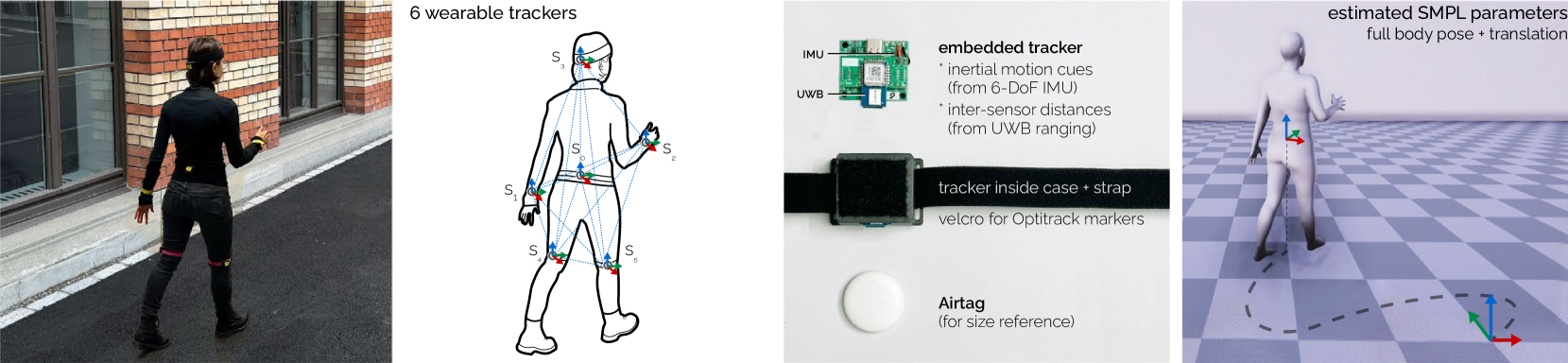
While camera-based capture systems remain the gold standard for recording human motion, learning-based tracking systems based on sparse wearable sensors are gaining popularity. Most commonly, they use inertial sensors, whose propensity for drift and jitter have so far limited tracking accuracy. In this paper, we propose Ultra Inertial Poser, a novel 3D full body pose estimation method that constrains drift and jitter in inertial tracking via inter-sensor distances. We estimate these distances across sparse sensor setups using a lightweight embedded tracker that augments inexpensive off-the-shelf 6D inertial measurement units with ultra-wideband radio-based ranging$-$dynamically and without the need for stationary reference anchors. Our method then fuses these inter-sensor distances with the 3D states estimated from each sensor Our graph-based machine learning model processes the 3D states and distances to estimate a person's 3D full body pose and translation. To train our model, we synthesize inertial measurements and distance estimates from the motion capture database AMASS. For evaluation, we contribute a novel motion dataset of 10 participants who performed 25 motion types, captured by 6 wearable IMU+UWB trackers and an optical motion capture system, totaling 200 minutes of synchronized sensor data (UIP-DB). Our extensive experiments show state-of-the-art performance for our method over PIP and TIP, reducing position error from $13.62$ to $10.65cm$ ($22%$ better) and lowering jitter from $1.56$ to $0.055km/s^3$ (a reduction of $97%$).
Read more5/1/2024
0
WheelPose: Data Synthesis Techniques to Improve Pose Estimation Performance on Wheelchair Users
William Huang, Sam Ghahremani, Siyou Pei, Yang Zhang
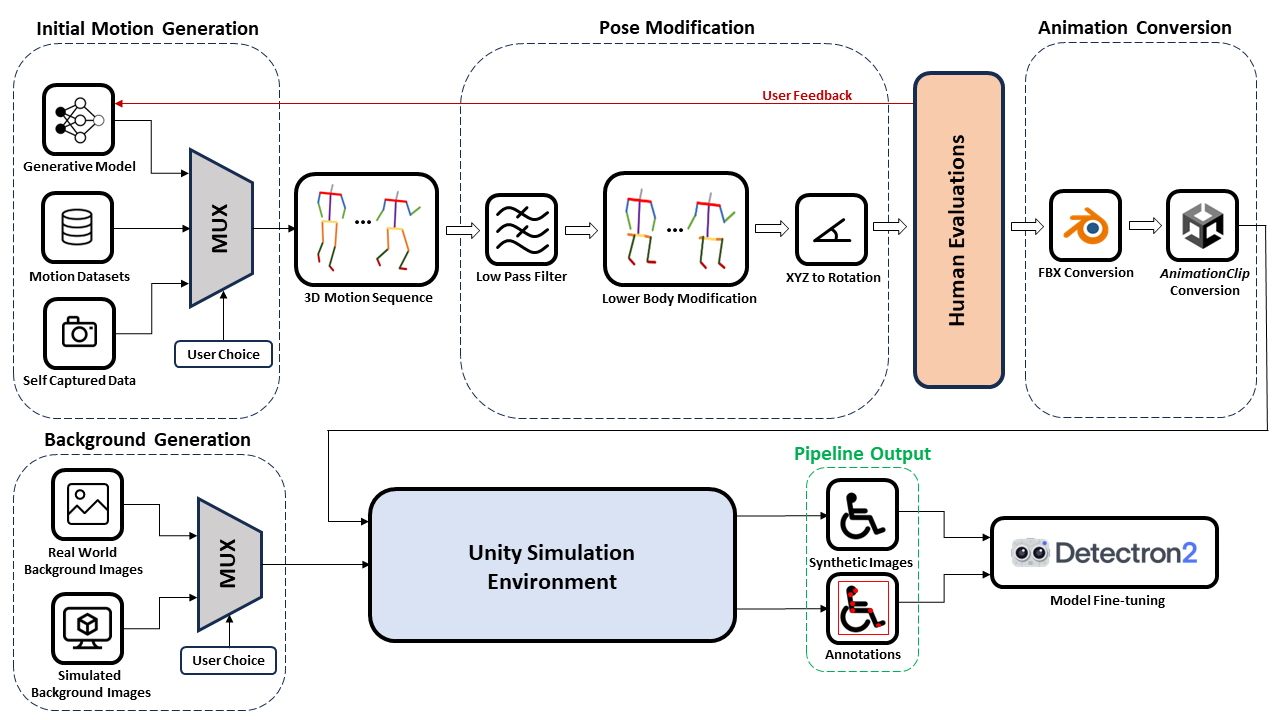
Existing pose estimation models perform poorly on wheelchair users due to a lack of representation in training data. We present a data synthesis pipeline to address this disparity in data collection and subsequently improve pose estimation performance for wheelchair users. Our configurable pipeline generates synthetic data of wheelchair users using motion capture data and motion generation outputs simulated in the Unity game engine. We validated our pipeline by conducting a human evaluation, investigating perceived realism, diversity, and an AI performance evaluation on a set of synthetic datasets from our pipeline that synthesized different backgrounds, models, and postures. We found our generated datasets were perceived as realistic by human evaluators, had more diversity than existing image datasets, and had improved person detection and pose estimation performance when fine-tuned on existing pose estimation models. Through this work, we hope to create a foothold for future efforts in tackling the inclusiveness of AI in a data-centric and human-centric manner with the data synthesis techniques demonstrated in this work. Finally, for future works to extend upon, we open source all code in this research and provide a fully configurable Unity Environment used to generate our datasets. In the case of any models we are unable to share due to redistribution and licensing policies, we provide detailed instructions on how to source and replace said models.
Read more4/29/2024
🐍
0
EgoPoser: Robust Real-Time Egocentric Pose Estimation from Sparse and Intermittent Observations Everywhere
Jiaxi Jiang, Paul Streli, Manuel Meier, Christian Holz
Full-body egocentric pose estimation from head and hand poses alone has become an active area of research to power articulate avatar representations on headset-based platforms. However, existing methods over-rely on the indoor motion-capture spaces in which datasets were recorded, while simultaneously assuming continuous joint motion capture and uniform body dimensions. We propose EgoPoser to overcome these limitations with four main contributions. 1) EgoPoser robustly models body pose from intermittent hand position and orientation tracking only when inside a headset's field of view. 2) We rethink input representations for headset-based ego-pose estimation and introduce a novel global motion decomposition method that predicts full-body pose independent of global positions. 3) We enhance pose estimation by capturing longer motion time series through an efficient SlowFast module design that maintains computational efficiency. 4) EgoPoser generalizes across various body shapes for different users. We experimentally evaluate our method and show that it outperforms state-of-the-art methods both qualitatively and quantitatively while maintaining a high inference speed of over 600fps. EgoPoser establishes a robust baseline for future work where full-body pose estimation no longer needs to rely on outside-in capture and can scale to large-scale and unseen environments.
Read more9/9/2024