WheelPose: Data Synthesis Techniques to Improve Pose Estimation Performance on Wheelchair Users

0
Sign in to get full access
Overview
- This paper proposes "WheelPose", a technique to improve the performance of 3D pose estimation on wheelchair users by leveraging data synthesis methods.
- The researchers found that existing 3D pose estimation models struggled to accurately predict the poses of wheelchair users, likely due to the lack of representative training data.
- WheelPose addresses this by generating synthetic training data that incorporates wheelchair-specific poses and appearances, which can then be used to fine-tune and improve the performance of 3D pose estimation models.
Plain English Explanation
3D pose estimation is a computer vision technique that can detect and track the position and movement of a person's body parts, like their arms, legs, and head. This information is useful for applications like interactive gaming, augmented reality, and accessibility tools for people with disabilities.
However, the researchers found that existing 3D pose estimation models did not work well for people who use wheelchairs. This is likely because the training data used to develop these models did not include enough examples of people in wheelchairs, so the models struggled to recognize and accurately track their poses.
To address this, the researchers developed a new technique called "WheelPose" that can create synthetic, or computer-generated, training data depicting people in wheelchairs in various poses. By fine-tuning the 3D pose estimation models using this additional data, the researchers were able to significantly improve the models' performance on wheelchair users.
This is an important advancement because it can help make 3D pose estimation technology more inclusive and accessible for people with disabilities who use wheelchairs. By improving the performance of these models on wheelchair users, WheelPose could enable new applications and experiences that better accommodate their needs.
Technical Explanation
The key components of the WheelPose approach are:
-
Data Synthesis: The researchers developed techniques to automatically generate realistic 3D models of wheelchair users in various poses and configurations. This included modeling the wheelchair itself, as well as simulating different user movements and interactions with the wheelchair.
-
Model Fine-Tuning: The researchers used the synthetic wheelchair user data to fine-tune existing 3D pose estimation models, such as HRNet and SPIN. This process helped the models learn the unique characteristics of wheelchair users' poses and appearances.
-
Evaluation: The researchers tested the fine-tuned pose estimation models on benchmark datasets containing real-world wheelchair user data. The results showed significant improvements in the models' ability to accurately detect and track the poses of wheelchair users compared to the original, unmodified models.
The data synthesis process used techniques like BlendMimic3D to generate realistic 3D wheelchair user models, and then applied these models to a diverse range of virtual environments and scenarios to create a large, varied dataset for model training.
Critical Analysis
The WheelPose approach represents an important step towards making 3D pose estimation more inclusive and accessible for people with disabilities who use wheelchairs. By addressing a key limitation in existing models, the researchers have opened up new possibilities for applications that can better support the needs of wheelchair users.
However, the paper does acknowledge some limitations of the current work. For example, the synthetic data used for fine-tuning may not fully capture the nuance and diversity of real-world wheelchair user poses and appearances. Additionally, the evaluation was conducted on a relatively small dataset of wheelchair users, and further testing would be needed to ensure the generalizability of the approach.
As with any research on 3D human pose estimation, there are also broader challenges around occlusions, camera viewpoints, and real-world deployment that the WheelPose technique does not directly address. Continued research and development will be needed to overcome these challenges and further improve the accessibility and performance of 3D pose estimation for wheelchair users.
Conclusion
The WheelPose technique represents an important contribution to the field of 3D pose estimation by addressing a significant gap in the performance of existing models when it comes to wheelchair users. By leveraging data synthesis methods to generate representative training data, the researchers were able to significantly improve the accuracy of 3D pose estimation on this underserved population.
This work has the potential to enable new applications and experiences that are more inclusive and accessible for people with disabilities who use wheelchairs. As 3D pose estimation technology continues to advance, it will be crucial to ensure that the needs and experiences of diverse user groups are taken into account, and that the benefits of these technologies are equitably distributed. The WheelPose approach provides a valuable example of how data-driven techniques can be used to address such challenges.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
WheelPose: Data Synthesis Techniques to Improve Pose Estimation Performance on Wheelchair Users
William Huang, Sam Ghahremani, Siyou Pei, Yang Zhang
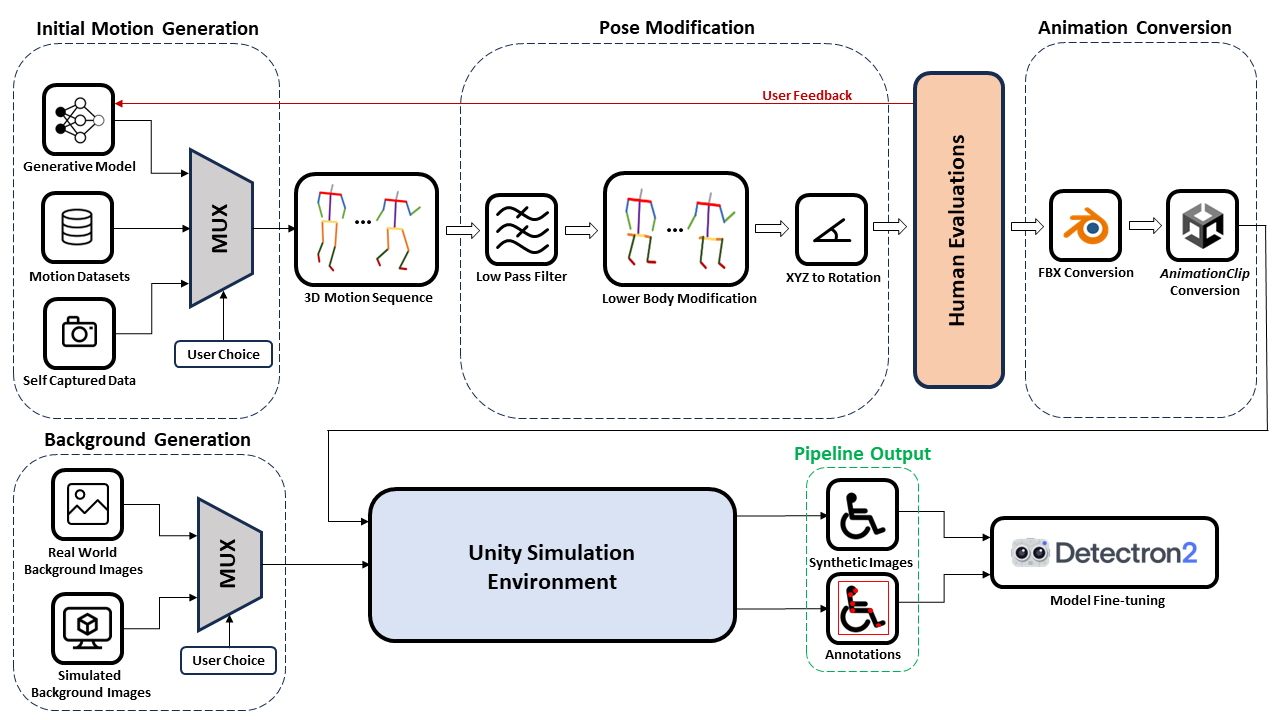
Existing pose estimation models perform poorly on wheelchair users due to a lack of representation in training data. We present a data synthesis pipeline to address this disparity in data collection and subsequently improve pose estimation performance for wheelchair users. Our configurable pipeline generates synthetic data of wheelchair users using motion capture data and motion generation outputs simulated in the Unity game engine. We validated our pipeline by conducting a human evaluation, investigating perceived realism, diversity, and an AI performance evaluation on a set of synthetic datasets from our pipeline that synthesized different backgrounds, models, and postures. We found our generated datasets were perceived as realistic by human evaluators, had more diversity than existing image datasets, and had improved person detection and pose estimation performance when fine-tuned on existing pose estimation models. Through this work, we hope to create a foothold for future efforts in tackling the inclusiveness of AI in a data-centric and human-centric manner with the data synthesis techniques demonstrated in this work. Finally, for future works to extend upon, we open source all code in this research and provide a fully configurable Unity Environment used to generate our datasets. In the case of any models we are unable to share due to redistribution and licensing policies, we provide detailed instructions on how to source and replace said models.
Read more4/29/2024
📊
0
On the power of data augmentation for head pose estimation
Michael Welter
Deep learning has been impressively successful in the last decade in predicting human head poses from monocular images. For in-the-wild inputs, the research community has predominantly relied on a single training set of semi-synthetic nature. This paper suggest the combination of different flavors of synthetic data in order to achieve better generalization to natural images. Moreover, additional expansion of the data volume using traditional out-of-plane rotation synthesis is considered. Together with a novel combination of losses and a network architecture with a standard feature-extractor, a competitive model is obtained, both in accuracy and efficiency, which allows full 6 DoF pose estimation in practical real-time applications.
Read more7/12/2024

0
Diversifying Human Pose in Synthetic Data for Aerial-view Human Detection
Yi-Ting Shen, Hyungtae Lee, Heesung Kwon, Shuvra S. Bhattacharyya
We present a framework for diversifying human poses in a synthetic dataset for aerial-view human detection. Our method firstly constructs a set of novel poses using a pose generator and then alters images in the existing synthetic dataset to assume the novel poses while maintaining the original style using an image translator. Since images corresponding to the novel poses are not available in training, the image translator is trained to be applicable only when the input and target poses are similar, thus training does not require the novel poses and their corresponding images. Next, we select a sequence of target novel poses from the novel pose set, using Dijkstra's algorithm to ensure that poses closer to each other are located adjacently in the sequence. Finally, we repeatedly apply the image translator to each target pose in sequence to produce a group of novel pose images representing a variety of different limited body movements from the source pose. Experiments demonstrate that, regardless of how the synthetic data is used for training or the data size, leveraging the pose-diversified synthetic dataset in training generally presents remarkably better accuracy than using the original synthetic dataset on three aerial-view human detection benchmarks (VisDrone, Okutama-Action, and ICG) in the few-shot regime.
Read more5/28/2024

0
New!WheelPoser: Sparse-IMU Based Body Pose Estimation for Wheelchair Users
Yunzhi Li, Vimal Mollyn, Kuang Yuan, Patrick Carrington
Despite researchers having extensively studied various ways to track body pose on-the-go, most prior work does not take into account wheelchair users, leading to poor tracking performance. Wheelchair users could greatly benefit from this pose information to prevent injuries, monitor their health, identify environmental accessibility barriers, and interact with gaming and VR experiences. In this work, we present WheelPoser, a real-time pose estimation system specifically designed for wheelchair users. Our system uses only four strategically placed IMUs on the user's body and wheelchair, making it far more practical than prior systems using cameras and dense IMU arrays. WheelPoser is able to track a wheelchair user's pose with a mean joint angle error of 14.30 degrees and a mean joint position error of 6.74 cm, more than three times better than similar systems using sparse IMUs. To train our system, we collect a novel WheelPoser-IMU dataset, consisting of 167 minutes of paired IMU sensor and motion capture data of people in wheelchairs, including wheelchair-specific motions such as propulsion and pressure relief. Finally, we explore the potential application space enabled by our system and discuss future opportunities. Open-source code, models, and dataset can be found here: https://github.com/axle-lab/WheelPoser.
Read more9/16/2024