Where to Decide? Centralized vs. Distributed Vehicle Assignment for Platoon Formation

0
🤖
Sign in to get full access
Overview
- Platooning is a cooperative driving application for future intelligent transportation systems.
- Vehicles need to be assigned to platoons, which requires an algorithm for platoon formation.
- Vehicle-to-platoon assignments must be computed on-demand when vehicles join or leave the freeways.
- Individual properties of vehicles must be considered to get the best results from platooning.
Plain English Explanation
Platooning is a technology where vehicles drive close together in a group, like a "platoon." This can help make transportation more efficient in the future. To make platooning work, there needs to be an algorithm that decides which vehicles should be in each platoon.
This decision has to be made quickly, like when vehicles join or leave the highway. The algorithm also has to consider the individual characteristics of each vehicle, like how fast it wants to drive and where it is on the road. This is important to get the best results from platooning.
The paper explores different ways to solve this vehicle-to-platoon assignment problem. It looks at three approaches: a centralized solver, a centralized greedy method, and a distributed greedy method. These approaches differ in how much information they have about the vehicles and the techniques they use to make the assignments.
Technical Explanation
The paper defines the vehicle-to-platoon assignment problem as an optimization problem based on the similarity between vehicles. Similarity is determined by factors like the desired driving speed and the position of the vehicles on the road.
The centralized solver approach uses a Mixed Integer Programming (MIP) solver to compute the optimal vehicle-to-platoon assignments, assuming global knowledge of all vehicles. The centralized greedy and distributed greedy approaches use greedy heuristics, with the distributed approach having more limited local knowledge.
The paper evaluates the performance of these three approaches through large-scale simulations using the PlaFoSim platform. The results show that while the distributed greedy approach has some disadvantages due to its limited local knowledge, it performs as well as the centralized solver across most metrics. Both the centralized solver and distributed greedy outperform the centralized greedy approach, which suffers from synchronization and greedy selection effects.
Critical Analysis
The paper acknowledges that the centralized solver approach, while achieving close to optimal results, requires a complex MIP solver and assumes global knowledge of all vehicles. This may not be practical in real-world deployment scenarios.
The distributed greedy approach, on the other hand, requires the least assumptions and complexity, making it a more viable option for real-world implementation. However, the paper does not explore the scalability of this approach as the number of vehicles and platoons increases.
Additionally, the paper does not address potential issues related to communication reliability, security, and privacy in a distributed platooning system. These factors may have a significant impact on the feasibility and adoption of the distributed greedy approach.
Conclusion
The paper presents an exploration of different approaches for solving the vehicle-to-platoon assignment problem, a key challenge in implementing platooning for future intelligent transportation systems. While the centralized solver approach achieves the best results, the distributed greedy approach emerges as a promising alternative, with close to optimal performance and lower complexity.
The findings of this research have important implications for the development of efficient and practical platooning systems, which could lead to improved traffic flow, reduced fuel consumption, and enhanced road safety. Further research is needed to address the scalability and real-world deployment challenges of these approaches.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤖
0
Where to Decide? Centralized vs. Distributed Vehicle Assignment for Platoon Formation
Julian Heinovski, Falko Dressler
Platooning is a promising cooperative driving application for future intelligent transportation systems. In order to assign vehicles to platoons, some algorithm for platoon formation is required. Such vehicle-to-platoon assignments have to be computed on-demand, e.g., when vehicles join or leave the freeways. In order to get best results from platooning, individual properties of involved vehicles have to be considered during the assignment computation. In this paper, we explore the computation of vehicle-to-platoon assignments as an optimization problem based on similarity between vehicles. We define the similarity and, vice versa, the deviation among vehicles based on the desired driving speed of vehicles and their position on the road. We create three approaches to solve this assignment problem: centralized solver, centralized greedy, and distributed greedy, using a Mixed Integer Programming (MIP) solver and greedy heuristics, respectively.Conceptually, the approaches differ in both knowledge about vehicles as well as methodology. We perform a large-scale simulation study using PlaFoSim to compare all approaches. While the distributed greedy approach seems to have disadvantages due to the limited local knowledge, it performs as good as the centralized solver approach across most metrics. Both outperform the centralized greedy approach, which suffers from synchronization and greedy selection effects. The centralized solver approach however assumes global knowledge and requires a complex MIP solver to compute vehicle-to-platoon assignments. Overall, the distributed greedy approach achieves close to optimal results but requires the least assumptions and complexity.Therefore, we consider the distributed greedy approach the best approach among all presented approaches.
Read more7/29/2024
0
Planning of Truck Platooning for Road-Network Capacitated Vehicle Routing Problem
Yilang Hao, Zhibin Chen, Xiaotong Sun, Lu Tong
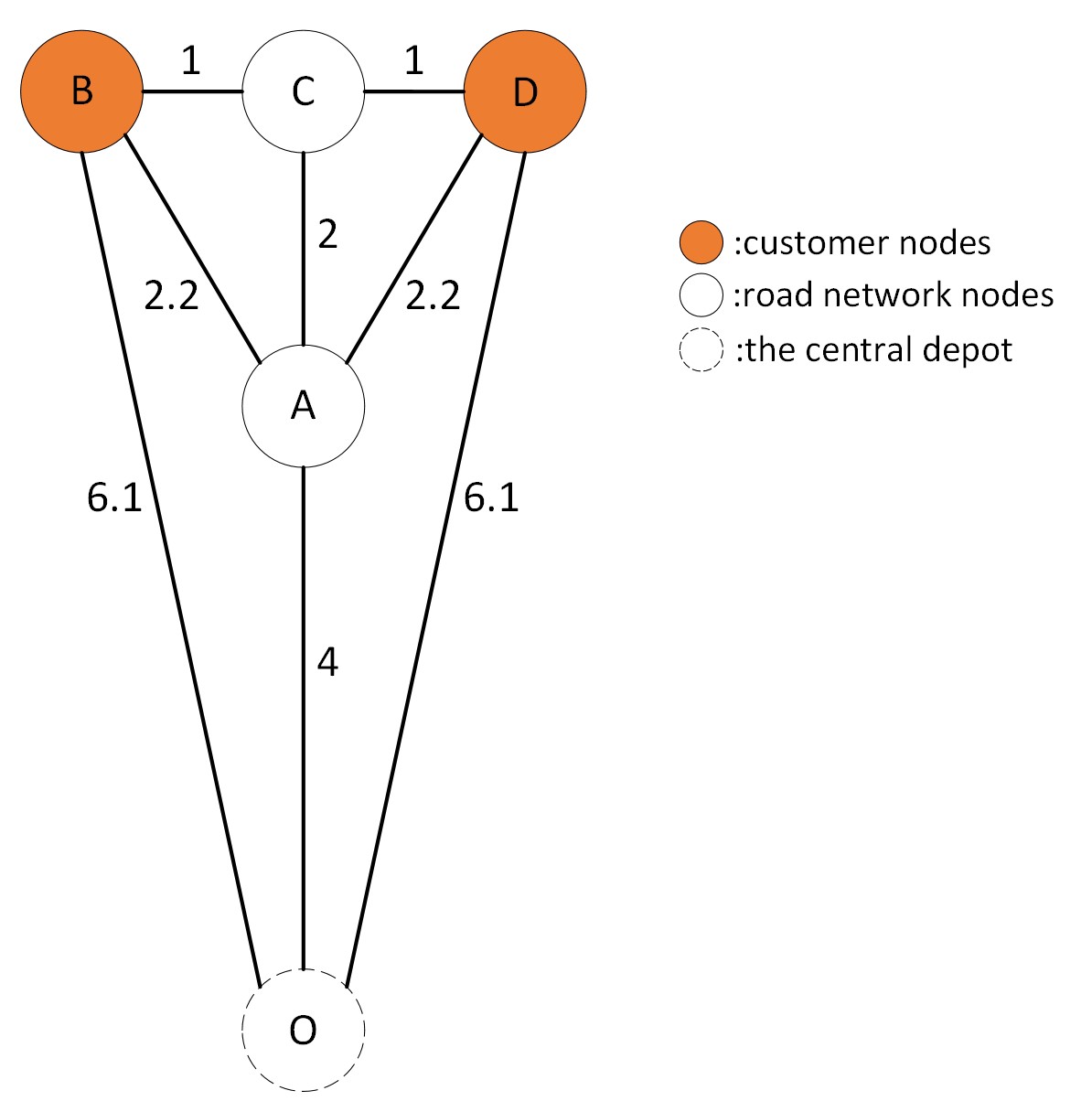
Truck platooning, a linking technology of trucks on the highway, has gained enormous attention in recent years due to its benefits in energy and operation cost savings. However, most existing studies on truck platooning limit their focus on scenarios in which each truck can serve only one customer demand and is thus with a specified origin-destination pair, so only routing and time schedules are considered. Nevertheless, in real-world logistics, each truck may need to serve multiple customers located at different places, and the operator has to determine not only the routing and time schedules of each truck but also the set of customers allocated to each truck and their sequence to visit. This is well known as a capacitated vehicle routing problem with time windows (CVRPTW), and considering the application of truck platooning in such a problem entails new modeling frameworks and tailored solution algorithms. In light of this, this study makes the first attempt to optimize the truck platooning plan for a road-network CVRPTW to minimize the total operation cost, including vehicles' fixed dispatch cost and energy cost, while fulfilling all delivery demands within their time window constraints. Specifically, the operation plan will dictate the number of trucks to be dispatched, the set of customers, and the routing and time schedules for each truck. In addition, the modeling framework is constructed based on a road network instead of a traditional customer node graph to better resemble and facilitate the platooning operation. A 3-stage algorithm embedded with a route-then-schedule scheme, dynamic programming, and modified insertion heuristic, is developed to solve the proposed model in a timely manner. Numerical experiments are conducted to validate the modeling framework, demonstrate the performance of the proposed solution algorithm, and quantify the benefit of truck platooning.
Read more4/23/2024

0
Learning a Stable, Safe, Distributed Feedback Controller for a Heterogeneous Platoon of Vehicles
Michael H. Shaham, Taskin Padir
Platooning of autonomous vehicles has the potential to increase safety and fuel efficiency on highways. The goal of platooning is to have each vehicle drive at some speed (set by the leader) while maintaining a safe distance from its neighbors. Many prior works have analyzed various controllers for platooning, most commonly linear feedback and distributed model predictive controllers. In this work, we introduce an algorithm for learning a stable, safe, distributed controller for a heterogeneous platoon. Our algorithm relies on recent developments in learning neural network stability and safety certificates. We train a controller for autonomous platooning in simulation and evaluate its performance on hardware with a platoon of four F1Tenth vehicles. We then perform further analysis in simulation with a platoon of 100 vehicles. Experimental results demonstrate the practicality of the algorithm and the learned controller by comparing the performance of the neural network controller to linear feedback and distributed model predictive controllers.
Read more4/22/2024

0
A Nested Graph Reinforcement Learning-based Decision-making Strategy for Eco-platooning
Xin Gao, Xueyuan Li, Hao Liu, Ao Li, Zhaoyang Ma, Zirui Li
Platooning technology is renowned for its precise vehicle control, traffic flow optimization, and energy efficiency enhancement. However, in large-scale mixed platoons, vehicle heterogeneity and unpredictable traffic conditions lead to virtual bottlenecks. These bottlenecks result in reduced traffic throughput and increased energy consumption within the platoon. To address these challenges, we introduce a decision-making strategy based on nested graph reinforcement learning. This strategy improves collaborative decision-making, ensuring energy efficiency and alleviating congestion. We propose a theory of nested traffic graph representation that maps dynamic interactions between vehicles and platoons in non-Euclidean spaces. By incorporating spatio-temporal weighted graph into a multi-head attention mechanism, we further enhance the model's capacity to process both local and global data. Additionally, we have developed a nested graph reinforcement learning framework to enhance the self-iterative learning capabilities of platooning. Using the I-24 dataset, we designed and conducted comparative algorithm experiments, generalizability testing, and permeability ablation experiments, thereby validating the proposed strategy's effectiveness. Compared to the baseline, our strategy increases throughput by 10% and decreases energy use by 9%. Specifically, increasing the penetration rate of CAVs significantly enhances traffic throughput, though it also increases energy consumption.
Read more8/15/2024