Windowed MAPF with Completeness Guarantees

0
Sign in to get full access
Overview
- The paper introduces a new approach called Windowed Multi-Agent Path Finding (Windowed MAPF) that can find optimal paths for multiple agents while guaranteeing completeness.
- Windowed MAPF breaks the problem into smaller windows to improve scalability, while still providing completeness guarantees.
- The authors present algorithms and theoretical analysis to show the effectiveness of their approach.
Plain English Explanation
The paper discusses a problem called Multi-Agent Path Finding (MAPF), where multiple robots or agents need to find the best paths to reach their destinations without colliding with each other. This is a common problem in areas like warehouse automation and robot coordination.
Traditional MAPF approaches can struggle to scale as the number of agents increases. To address this, the researchers introduce "Windowed MAPF", which breaks the overall problem into smaller, more manageable "windows" or sub-problems. By solving these sub-problems, they can find optimal paths for all the agents while still guaranteeing that the final solution will be complete (meaning all agents will reach their destinations).
The key insight is that by breaking the problem into windows, the algorithms can run more efficiently and handle larger numbers of agents. At the same time, the researchers prove that their approach maintains the important property of completeness - it will always find a solution if one exists.
Technical Explanation
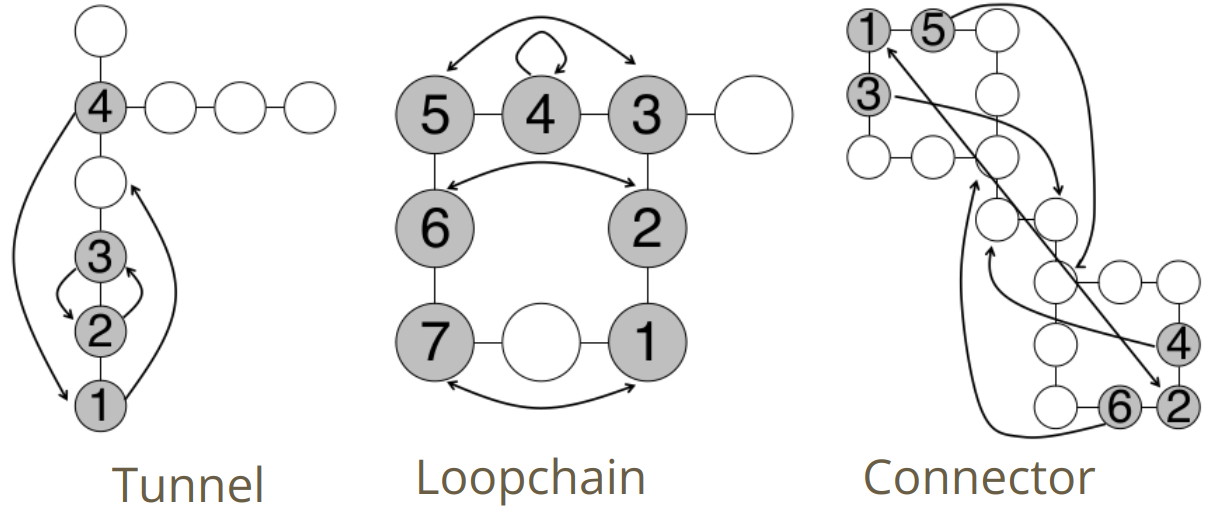
The paper formulates the Windowed MAPF problem, where the overall MAPF problem is divided into a series of smaller, overlapping windows. Each window contains a subset of the agents and obstacles, and the goal is to find optimal paths for the agents within that window.
The authors present two algorithms for solving Windowed MAPF:
-
Windowed CBS (WCBS): This algorithm extends the Conflict-Based Search (CBS) method to work with the windowed problem formulation. WCBS recursively solves the sub-problems within each window, while ensuring consistency across window boundaries.
-
Windowed ECBS (WECBS): This is an enhanced version that uses an Enhanced CBS (ECBS) approach, which trades off solution optimality for faster computation times.
The paper provides theoretical analysis to show that both WCBS and WECBS are complete, meaning they are guaranteed to find a solution if one exists. They also present empirical results demonstrating the scalability and efficiency of their Windowed MAPF approach compared to existing methods.
Critical Analysis
The paper makes a compelling case for the Windowed MAPF approach, showing how it can significantly improve the scalability of MAPF algorithms while retaining completeness guarantees. However, the authors acknowledge some potential limitations:
- The performance of Windowed MAPF may depend on the size and overlap of the windows, which requires careful tuning.
- The algorithms assume a discrete, grid-based environment, which may not always match real-world scenarios.
- The paper does not explore how Windowed MAPF would perform in dynamic environments with moving obstacles or agents joining/leaving the problem.
Further research could investigate ways to adaptively size the windows, extend the approach to continuous environments, and evaluate its performance in more realistic, dynamic settings.
Conclusion
The Windowed MAPF approach presented in this paper offers a promising solution to the scalability challenges of traditional MAPF methods. By breaking the problem into smaller, overlapping windows, the authors demonstrate how optimal paths can be found for large numbers of agents while still guaranteeing completeness. This has significant practical implications for real-world applications like warehouse automation, robot coordination, and other multi-agent systems that require efficient, reliable path planning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Windowed MAPF with Completeness Guarantees
Rishi Veerapaneni, Muhammad Suhail Saleem, Jiaoyang Li, Maxim Likhachev
Traditional multi-agent path finding (MAPF) methods try to compute entire start-goal paths which are collision free. However, computing an entire path can take too long for MAPF systems where agents need to replan fast. Methods that address this typically employ a windowed approach and only try to find collision free paths for a small windowed timestep horizon. This adaptation comes at the cost of incompleteness; all current windowed approaches can become stuck in deadlock or livelock. Our main contribution is to introduce our framework, WinC-MAPF, for Windowed MAPF that enables completeness. Our framework uses heuristic update insights from single-agent real-time heuristic search algorithms as well as agent independence ideas from MAPF algorithms. We also develop Single-Step CBS (SS-CBS), an instantiation of this framework using a novel modification to CBS. We show how SS-CBS, which only plans a single step and updates heuristics, can effectively solve tough scenarios where existing windowed approaches fail.
Read more10/3/2024
0
Multi-Agent Path Finding with Real Robot Dynamics and Interdependent Tasks for Automated Warehouses
Vassilissa Lehoux-Lebacque, Tomi Silander, Christelle Loiodice, Seungjoon Lee, Albert Wang, Sofia Michel
Multi-Agent Path Finding (MAPF) is an important optimization problem underlying the deployment of robots in automated warehouses and factories. Despite the large body of work on this topic, most approaches make heavy simplifications, both on the environment and the agents, which make the resulting algorithms impractical for real-life scenarios. In this paper, we consider a realistic problem of online order delivery in a warehouse, where a fleet of robots bring the products belonging to each order from shelves to workstations. This creates a stream of inter-dependent pickup and delivery tasks and the associated MAPF problem consists of computing realistic collision-free robot trajectories fulfilling these tasks. To solve this MAPF problem, we propose an extension of the standard Prioritized Planning algorithm to deal with the inter-dependent tasks (Interleaved Prioritized Planning) and a novel Via-Point Star (VP*) algorithm to compute an optimal dynamics-compliant robot trajectory to visit a sequence of goal locations while avoiding moving obstacles. We prove the completeness of our approach and evaluate it in simulation as well as in a real warehouse.
Read more8/28/2024
🤖
0
Scaling Lifelong Multi-Agent Path Finding to More Realistic Settings: Research Challenges and Opportunities
He Jiang, Yulun Zhang, Rishi Veerapaneni, Jiaoyang Li
Multi-Agent Path Finding (MAPF) is the problem of moving multiple agents from starts to goals without collisions. Lifelong MAPF (LMAPF) extends MAPF by continuously assigning new goals to agents. We present our winning approach to the 2023 League of Robot Runners LMAPF competition, which leads us to several interesting research challenges and future directions. In this paper, we outline three main research challenges. The first challenge is to search for high-quality LMAPF solutions within a limited planning time (e.g., 1s per step) for a large number of agents (e.g., 10,000) or extremely high agent density (e.g., 97.7%). We present future directions such as developing more competitive rule-based and anytime MAPF algorithms and parallelizing state-of-the-art MAPF algorithms. The second challenge is to alleviate congestion and the effect of myopic behaviors in LMAPF algorithms. We present future directions, such as developing moving guidance and traffic rules to reduce congestion, incorporating future prediction and real-time search, and determining the optimal agent number. The third challenge is to bridge the gaps between the LMAPF models used in the literature and real-world applications. We present future directions, such as dealing with more realistic kinodynamic models, execution uncertainty, and evolving systems.
Read more4/26/2024
🔎
0
Scalable Mechanism Design for Multi-Agent Path Finding
Paul Friedrich, Yulun Zhang, Michael Curry, Ludwig Dierks, Stephen McAleer, Jiaoyang Li, Tuomas Sandholm, Sven Seuken
Multi-Agent Path Finding (MAPF) involves determining paths for multiple agents to travel simultaneously and collision-free through a shared area toward given goal locations. This problem is computationally complex, especially when dealing with large numbers of agents, as is common in realistic applications like autonomous vehicle coordination. Finding an optimal solution is often computationally infeasible, making the use of approximate, suboptimal algorithms essential. Adding to the complexity, agents might act in a self-interested and strategic way, possibly misrepresenting their goals to the MAPF algorithm if it benefits them. Although the field of mechanism design offers tools to align incentives, using these tools without careful consideration can fail when only having access to approximately optimal outcomes. In this work, we introduce the problem of scalable mechanism design for MAPF and propose three strategyproof mechanisms, two of which even use approximate MAPF algorithms. We test our mechanisms on realistic MAPF domains with problem sizes ranging from dozens to hundreds of agents. We find that they improve welfare beyond a simple baseline.
Read more5/9/2024