Working Backwards: Learning to Place by Picking

0
Sign in to get full access
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Working Backwards: Learning to Place by Picking
Oliver Limoyo, Abhisek Konar, Trevor Ablett, Jonathan Kelly, Francois R. Hogan, Gregory Dudek
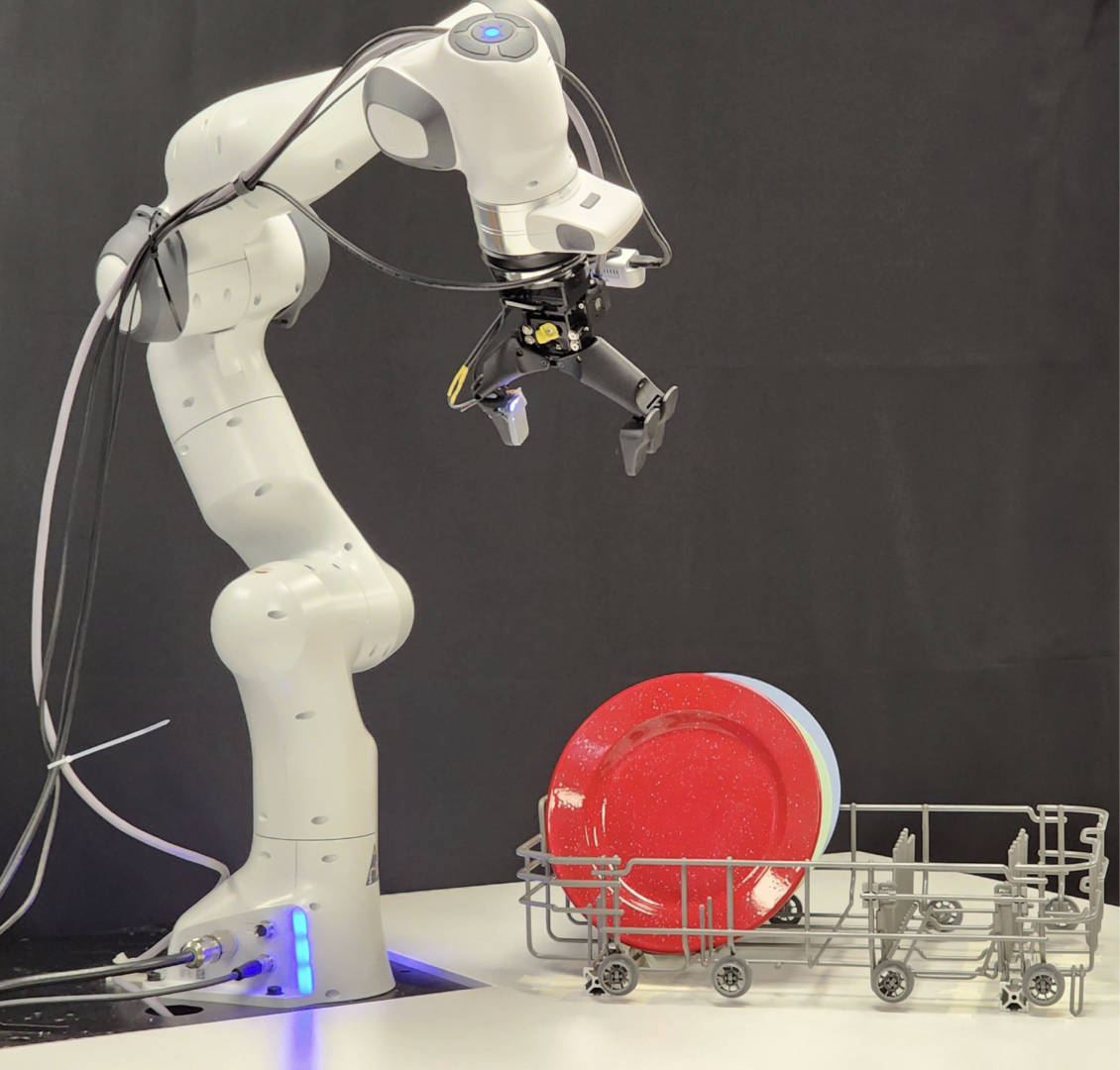
We present placing via picking (PvP), a method to autonomously collect real-world demonstrations for a family of placing tasks in which objects must be manipulated to specific, contact-constrained locations. With PvP, we approach the collection of robotic object placement demonstrations by reversing the grasping process and exploiting the inherent symmetry of the pick and place problems. Specifically, we obtain placing demonstrations from a set of grasp sequences of objects initially located at their target placement locations. Our system can collect hundreds of demonstrations in contact-constrained environments without human intervention using two modules: compliant control for grasping and tactile regrasping. We train a policy directly from visual observations through behavioural cloning, using the autonomously-collected demonstrations. By doing so, the policy can generalize to object placement scenarios outside of the training environment without privileged information (e.g., placing a plate picked up from a table). We validate our approach in home robot scenarios that include dishwasher loading and table setting. Our approach yields robotic placing policies that outperform policies trained with kinesthetic teaching, both in terms of success rate and data efficiency, while requiring no human supervision.
Read more7/10/2024

0
Planning Robot Placement for Object Grasping
Manish Saini, Melvin Paul Jacob, Minh Nguyen, Nico Hochgeschwender
When performing manipulation-based activities such as picking objects, a mobile robot needs to position its base at a location that supports successful execution. To address this problem, prominent approaches typically rely on costly grasp planners to provide grasp poses for a target object, which are then are then analysed to identify the best robot placements for achieving each grasp pose. In this paper, we propose instead to first find robot placements that would not result in collision with the environment and from where picking up the object is feasible, then evaluate them to find the best placement candidate. Our approach takes into account the robot's reachability, as well as RGB-D images and occupancy grid maps of the environment for identifying suitable robot poses. The proposed algorithm is embedded in a service robotic workflow, in which a person points to select the target object for grasping. We evaluate our approach with a series of grasping experiments, against an existing baseline implementation that sends the robot to a fixed navigation goal. The experimental results show how the approach allows the robot to grasp the target object from locations that are very challenging to the baseline implementation.
Read more5/28/2024

0
Learning Manipulation Tasks in Dynamic and Shared 3D Spaces
Hariharan Arunachalam, Marc Hanheide, Sariah Mghames
Automating the segregation process is a need for every sector experiencing a high volume of materials handling, repetitive and exhaustive operations, in addition to risky exposures. Learning automated pick-and-place operations can be efficiently done by introducing collaborative autonomous systems (e.g. manipulators) in the workplace and among human operators. In this paper, we propose a deep reinforcement learning strategy to learn the place task of multi-categorical items from a shared workspace between dual-manipulators and to multi-goal destinations, assuming the pick has been already completed. The learning strategy leverages first a stochastic actor-critic framework to train an agent's policy network, and second, a dynamic 3D Gym environment where both static and dynamic obstacles (e.g. human factors and robot mate) constitute the state space of a Markov decision process. Learning is conducted in a Gazebo simulator and experiments show an increase in cumulative reward function for the agent further away from human factors. Future investigations will be conducted to enhance the task performance for both agents simultaneously.
Read more4/30/2024

0
Grasp, See and Place: Efficient Unknown Object Rearrangement with Policy Structure Prior
Kechun Xu, Zhongxiang Zhou, Jun Wu, Haojian Lu, Rong Xiong, Yue Wang
We focus on the task of unknown object rearrangement, where a robot is supposed to re-configure the objects into a desired goal configuration specified by an RGB-D image. Recent works explore unknown object rearrangement systems by incorporating learning-based perception modules. However, they are sensitive to perception error, and pay less attention to task-level performance. In this paper, we aim to develop an effective system for unknown object rearrangement amidst perception noise. We theoretically reveal the noisy perception impacts grasp and place in a decoupled way, and show such a decoupled structure is valuable to improve task optimality. We propose GSP, a dual-loop system with the decoupled structure as prior. For the inner loop, we learn a see policy for self-confident in-hand object matching. For the outer loop, we learn a grasp policy aware of object matching and grasp capability guided by task-level rewards. We leverage the foundation model CLIP for object matching, policy learning and self-termination. A series of experiments indicate that GSP can conduct unknown object rearrangement with higher completion rates and fewer steps.
Read more8/2/2024