World Models with Hints of Large Language Models for Goal Achieving
2406.07381
0
0

Abstract
Reinforcement learning struggles in the face of long-horizon tasks and sparse goals due to the difficulty in manual reward specification. While existing methods address this by adding intrinsic rewards, they may fail to provide meaningful guidance in long-horizon decision-making tasks with large state and action spaces, lacking purposeful exploration. Inspired by human cognition, we propose a new multi-modal model-based RL approach named Dreaming with Large Language Models (DLLM). DLLM integrates the proposed hinting subgoals from the LLMs into the model rollouts to encourage goal discovery and reaching in challenging tasks. By assigning higher intrinsic rewards to samples that align with the hints outlined by the language model during model rollouts, DLLM guides the agent toward meaningful and efficient exploration. Extensive experiments demonstrate that the DLLM outperforms recent methods in various challenging, sparse-reward environments such as HomeGrid, Crafter, and Minecraft by 27.7%, 21.1%, and 9.9%, respectively.
Create account to get full access
Overview
- This paper proposes a novel approach to goal-achieving agents by combining world models and large language models.
- The key idea is to leverage the powerful language understanding and generation capabilities of large language models to guide the learning and planning of goal-achieving agents.
- The authors explore different ways of integrating language models into world models, a popular framework for building agents that can learn about their environment and plan towards goals.
Plain English Explanation
The researchers in this paper are trying to create AI agents that can accomplish complex goals in simulated environments. They want these agents to be able to understand language and reason about the world in a flexible way, similar to how humans do.
To achieve this, the researchers are combining two important AI techniques: world models and large language models. World models are AI systems that can learn an internal representation of their environment, allowing them to plan and make decisions. Large language models are powerful AI models that can understand and generate human-like language.
The key insight of this paper is that by integrating language models into world models, the agents can become much more capable at understanding their environment and figuring out how to achieve their goals. For example, the language model could help the agent understand high-level instructions or explain its reasoning in natural language.
The authors explore different ways of combining these two techniques, testing them in simulated environments. The goal is to create AI agents that can flexibly reason about the world and communicate like humans, while still being able to plan and act to achieve their objectives.
Technical Explanation
The researchers propose a novel approach to building goal-achieving agents by integrating world models and large language models. World models are a popular framework for building agents that can learn an internal representation of their environment, allowing them to plan and make decisions. Large language models are powerful AI models that can understand and generate human-like language.
The key insight of this paper is that by incorporating language models into world models, the agents can become much more capable at understanding their environment and figuring out how to achieve their goals. The language model could help the agent understand high-level instructions, explain its reasoning in natural language, or even assist in the planning and decision-making process.
The authors explore different ways of integrating the language model into the world model, such as using the language model to generate reward functions or guide the exploration of the environment. They evaluate the performance of these hybrid agents in simulated environments, comparing them to agents that use only world models or only language models.
The results suggest that the combination of world models and language models can lead to significant improvements in the agents' ability to understand and reason about their environment, as well as their overall task-completion performance.
Critical Analysis
The paper presents a promising approach to building more flexible and capable goal-achieving agents by leveraging the strengths of world models and large language models. The authors provide a solid technical foundation and experimental evaluation to support their claims.
However, the paper also acknowledges several limitations and areas for further research. For example, the experiments are conducted in relatively simple simulated environments, and it's unclear how well the approach would scale to more complex, real-world scenarios. Additionally, the paper does not address potential issues related to the safety and reliability of these hybrid agents, such as their ability to handle unexpected situations or their susceptibility to adversarial attacks.
It would also be interesting to see the authors explore additional ways of integrating the language model, such as using it to generate explanations or justifications for the agent's actions, or to engage in interactive dialogues with human users. Incorporating more advanced language understanding and generation capabilities could further enhance the agents' flexibility and communication skills.
Overall, this paper represents an important step towards building more intelligent and capable goal-achieving agents. The combination of world models and large language models is a promising direction for future research in this area, and the authors have provided a solid foundation for further exploration and development.
Conclusion
This paper presents a novel approach to building goal-achieving agents by integrating world models and large language models. The key insight is that the language understanding and generation capabilities of large language models can be leveraged to enhance the planning and decision-making abilities of agents built using the world model framework.
The authors explore different ways of incorporating language models into world models and evaluate the performance of these hybrid agents in simulated environments. The results suggest that this approach can lead to significant improvements in the agents' ability to understand and reason about their environment, as well as their overall task-completion performance.
While the paper acknowledges several limitations and areas for further research, it represents an important step towards building more flexible and capable goal-achieving agents. The combination of world models and large language models is a promising direction for future research in this area, and the insights and techniques presented in this paper can serve as a foundation for further exploration and development.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
From Words to Actions: Unveiling the Theoretical Underpinnings of LLM-Driven Autonomous Systems
Jianliang He, Siyu Chen, Fengzhuo Zhang, Zhuoran Yang
0
0
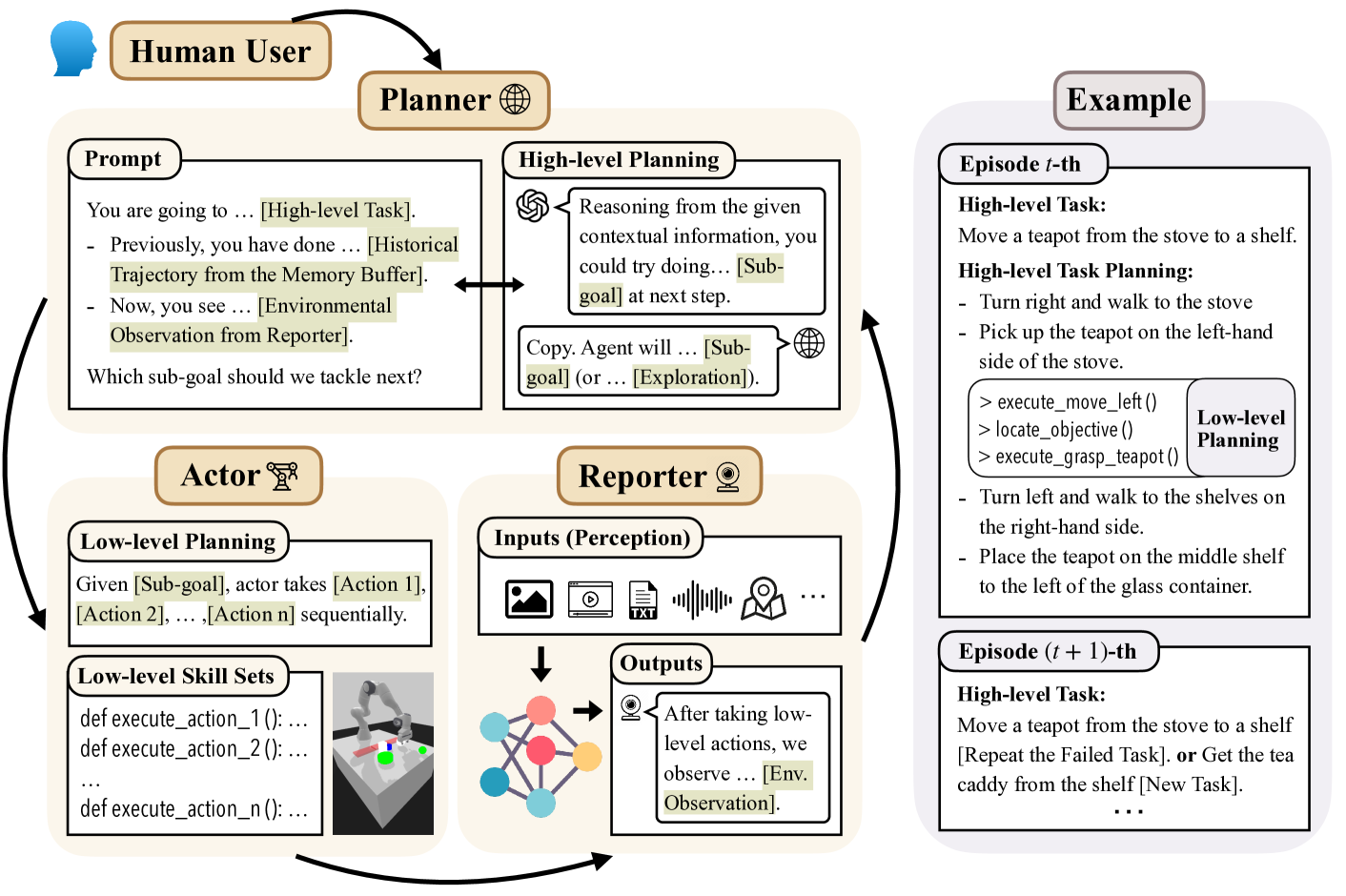
In this work, from a theoretical lens, we aim to understand why large language model (LLM) empowered agents are able to solve decision-making problems in the physical world. To this end, consider a hierarchical reinforcement learning (RL) model where the LLM Planner and the Actor perform high-level task planning and low-level execution, respectively. Under this model, the LLM Planner navigates a partially observable Markov decision process (POMDP) by iteratively generating language-based subgoals via prompting. Under proper assumptions on the pretraining data, we prove that the pretrained LLM Planner effectively performs Bayesian aggregated imitation learning (BAIL) through in-context learning. Additionally, we highlight the necessity for exploration beyond the subgoals derived from BAIL by proving that naively executing the subgoals returned by LLM leads to a linear regret. As a remedy, we introduce an $epsilon$-greedy exploration strategy to BAIL, which is proven to incur sublinear regret when the pretraining error is small. Finally, we extend our theoretical framework to include scenarios where the LLM Planner serves as a world model for inferring the transition model of the environment and to multi-agent settings, enabling coordination among multiple Actors.
5/31/2024
Reinforcement Learning Problem Solving with Large Language Models
Sina Gholamian, Domingo Huh
0
0
Large Language Models (LLMs) encapsulate an extensive amount of world knowledge, and this has enabled their application in various domains to improve the performance of a variety of Natural Language Processing (NLP) tasks. This has also facilitated a more accessible paradigm of conversation-based interactions between humans and AI systems to solve intended problems. However, one interesting avenue that shows untapped potential is the use of LLMs as Reinforcement Learning (RL) agents to enable conversational RL problem solving. Therefore, in this study, we explore the concept of formulating Markov Decision Process-based RL problems as LLM prompting tasks. We demonstrate how LLMs can be iteratively prompted to learn and optimize policies for specific RL tasks. In addition, we leverage the introduced prompting technique for episode simulation and Q-Learning, facilitated by LLMs. We then show the practicality of our approach through two detailed case studies for Research Scientist and Legal Matter Intake workflows.
4/30/2024
💬
Large Language Models are Learnable Planners for Long-Term Recommendation
Wentao Shi, Xiangnan He, Yang Zhang, Chongming Gao, Xinyue Li, Jizhi Zhang, Qifan Wang, Fuli Feng
0
0
Planning for both immediate and long-term benefits becomes increasingly important in recommendation. Existing methods apply Reinforcement Learning (RL) to learn planning capacity by maximizing cumulative reward for long-term recommendation. However, the scarcity of recommendation data presents challenges such as instability and susceptibility to overfitting when training RL models from scratch, resulting in sub-optimal performance. In this light, we propose to leverage the remarkable planning capabilities over sparse data of Large Language Models (LLMs) for long-term recommendation. The key to achieving the target lies in formulating a guidance plan following principles of enhancing long-term engagement and grounding the plan to effective and executable actions in a personalized manner. To this end, we propose a Bi-level Learnable LLM Planner framework, which consists of a set of LLM instances and breaks down the learning process into macro-learning and micro-learning to learn macro-level guidance and micro-level personalized recommendation policies, respectively. Extensive experiments validate that the framework facilitates the planning ability of LLMs for long-term recommendation. Our code and data can be found at https://github.com/jizhi-zhang/BiLLP.
4/29/2024
💬
Learning Reward for Robot Skills Using Large Language Models via Self-Alignment
Yuwei Zeng, Yao Mu, Lin Shao
0
0
Learning reward functions remains the bottleneck to equip a robot with a broad repertoire of skills. Large Language Models (LLM) contain valuable task-related knowledge that can potentially aid in the learning of reward functions. However, the proposed reward function can be imprecise, thus ineffective which requires to be further grounded with environment information. We proposed a method to learn rewards more efficiently in the absence of humans. Our approach consists of two components: We first use the LLM to propose features and parameterization of the reward, then update the parameters through an iterative self-alignment process. In particular, the process minimizes the ranking inconsistency between the LLM and the learnt reward functions based on the execution feedback. The method was validated on 9 tasks across 2 simulation environments. It demonstrates a consistent improvement over training efficacy and efficiency, meanwhile consuming significantly fewer GPT tokens compared to the alternative mutation-based method.
5/17/2024