Tightly-Coupled LiDAR-IMU-Wheel Odometry with Online Calibration of a Kinematic Model for Skid-Steering Robots
2404.02515
0
0
Abstract
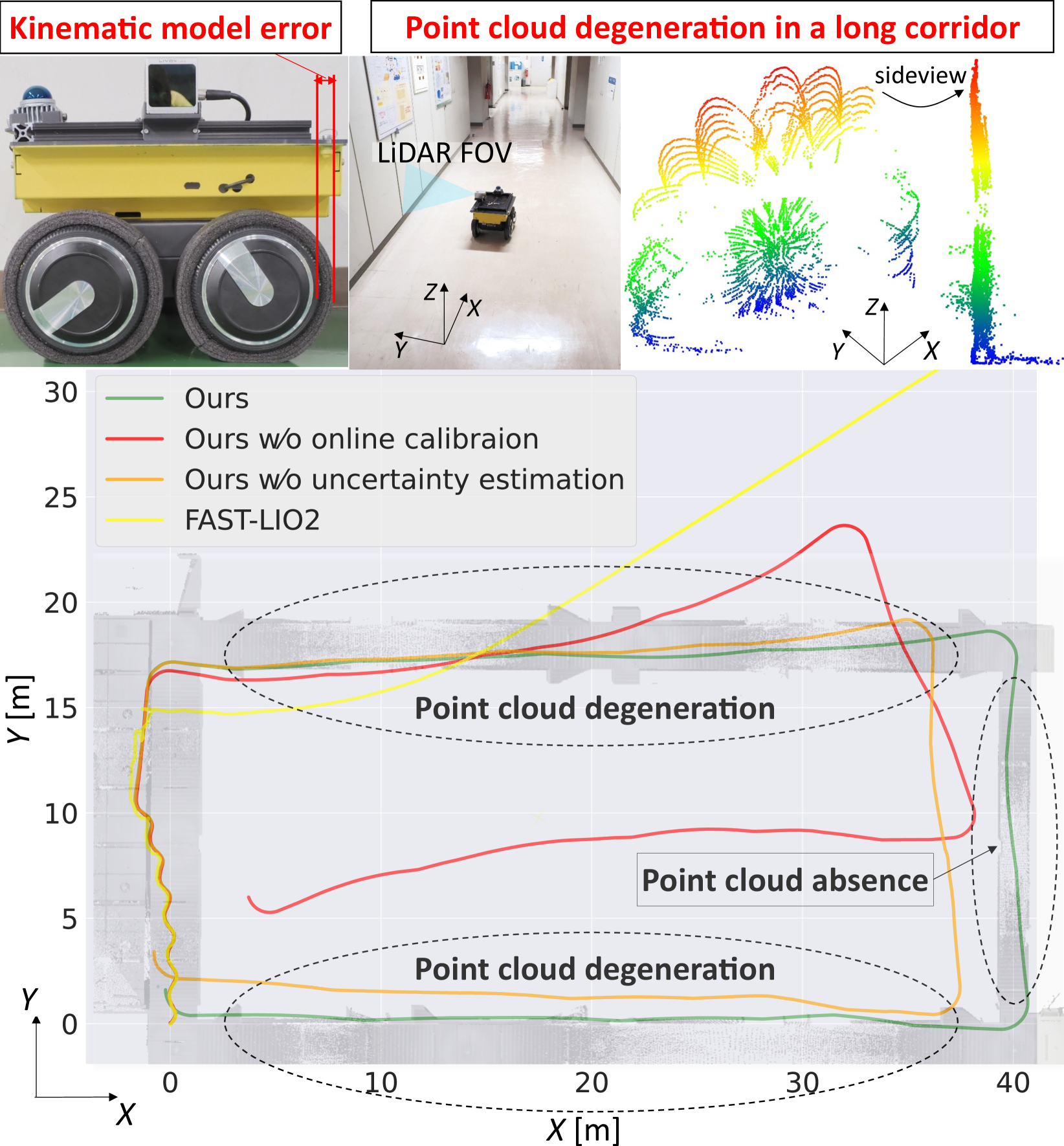
Tunnels and long corridors are challenging environments for mobile robots because a LiDAR point cloud should degenerate in these environments. To tackle point cloud degeneration, this study presents a tightly-coupled LiDAR-IMU-wheel odometry algorithm with an online calibration for skid-steering robots. We propose a full linear wheel odometry factor, which not only serves as a motion constraint but also performs the online calibration of kinematic models for skid-steering robots. Despite the dynamically changing kinematic model (e.g., wheel radii changes caused by tire pressures) and terrain conditions, our method can address the model error via online calibration. Moreover, our method enables an accurate localization in cases of degenerated environments, such as long and straight corridors, by calibration while the LiDAR-IMU fusion sufficiently operates. Furthermore, we estimate the uncertainty (i.e., covariance matrix) of the wheel odometry online for creating a reasonable constraint. The proposed method is validated through three experiments. The first indoor experiment shows that the proposed method is robust in severe degeneracy cases (long corridors) and changes in the wheel radii. The second outdoor experiment demonstrates that our method accurately estimates the sensor trajectory despite being in rough outdoor terrain owing to online uncertainty estimation of wheel odometry. The third experiment shows the proposed online calibration enables robust odometry estimation in changing terrains.
Create account to get full access
Overview
- This paper presents a tightly-coupled LiDAR-IMU-Wheel odometry system for skid-steering robots, with an online calibration of the kinematic model.
- The system combines data from LiDAR, inertial measurement units (IMUs), and wheel odometry to estimate the robot's pose (position and orientation) with high accuracy.
- The online calibration of the kinematic model allows the system to adapt to changes in the robot's configuration or environment, improving long-term performance.
Plain English Explanation
In this research, the authors have developed a new way for robots to figure out where they are and which way they're facing, using a combination of different sensors. Robots often use laser scanners (LiDAR), motion sensors (IMUs), and wheel encoders to track their movements, but the authors have found a way to tightly integrate all of these sensors together to get much more accurate and reliable pose (position and orientation) estimates.
The key innovation is that the system can continuously calibrate the robot's kinematic model, which describes how the robot's movements translate to changes in its position and orientation. This allows the system to adapt to changes in the robot's configuration or the environment, ensuring that the pose estimates remain accurate over long periods of time. <a href="https://aimodels.fyi/papers/arxiv/versatile-lidar-inertial-odometry-se-2-constraints">This is important for robots operating in complex, unstructured environments</a> where their movements and sensor readings can change unexpectedly.
By combining data from multiple sensors in a smart way and continuously updating the robot's internal model, the authors have created a system that can track a robot's movements with high precision, even as the robot's environment and configuration change over time. This could be useful for a wide range of robotic applications, from autonomous navigation to mapping and exploration.
Technical Explanation
The proposed system uses a tightly-coupled sensor fusion approach to integrate data from a LiDAR, IMUs, and wheel encoders to estimate the 6-DOF (degrees of freedom) pose of a skid-steering robot. The LiDAR provides 3D point cloud data, the IMUs measure linear accelerations and angular rates, and the wheel encoders track the rotational velocities of the wheels.
The authors develop a kinematic model that describes the relationship between the robot's wheel velocities and its overall pose. This model includes parameters such as wheel radii and track width that can vary due to factors like wheel slippage or configuration changes. To account for these variations, the system performs online calibration of the kinematic model parameters, estimating them alongside the robot's pose using an extended Kalman filter.
The sensor fusion is performed in a tightly-coupled manner, where the LiDAR, IMU, and wheel odometry measurements are all directly incorporated into the state estimation. This allows the system to leverage the complementary strengths of the different sensors, with the LiDAR providing high-accuracy short-term pose estimates, the IMUs providing high-frequency motion data, and the wheel encoders providing long-term odometry information.
The authors evaluate their system on both simulated and real-world datasets, demonstrating significant improvements in pose estimation accuracy compared to using individual sensors or loosely-coupled sensor fusion approaches. <a href="https://aimodels.fyi/papers/arxiv/bi-level-trajectory-optimization-uneven-terrains-differentiable">The online calibration of the kinematic model is shown to be particularly important for maintaining performance in the face of changes to the robot's configuration or environment</a>.
Critical Analysis
The paper presents a comprehensive and well-designed system for fusing LiDAR, IMU, and wheel odometry data for robust pose estimation of skid-steering robots. The online calibration of the kinematic model is a notable strength, as it allows the system to adapt to changes that would typically degrade the performance of a static model.
However, the paper does not address the potential limitations of the system, such as its performance in complex environments with dynamic obstacles or its computational requirements for real-time operation. <a href="https://aimodels.fyi/papers/arxiv/evaluation-cfear-radar-odometry">The authors could have also compared their approach to other state-of-the-art sensor fusion techniques, such as those using radar or visual-inertial odometry</a>, to provide a more complete evaluation of the system's capabilities.
Additionally, the authors mention that the kinematic model parameters are estimated alongside the robot's pose, but they do not provide details on how these parameters are initialized or constrained. <a href="https://aimodels.fyi/papers/arxiv/simultaneous-state-estimation-contact-detection-legged-robots">Understanding the sensitivity of the system to these parameters would be useful for practitioners implementing the approach</a>.
Overall, the paper presents a well-executed and promising approach to tightly-coupled LiDAR-IMU-Wheel odometry for skid-steering robots, but further research and evaluation would be needed to fully understand its limitations and potential areas for improvement.
Conclusion
This research presents a novel system for tightly-coupling LiDAR, IMU, and wheel odometry data to estimate the 6-DOF pose of skid-steering robots with high accuracy. The key innovation is the online calibration of the kinematic model, which allows the system to adapt to changes in the robot's configuration or environment. This improves the long-term performance of the pose estimation, which is crucial for autonomous navigation and mapping applications.
The technical approach and experimental evaluation demonstrate the effectiveness of the proposed system, and the authors have made a valuable contribution to the field of sensor fusion for mobile robotics. <a href="https://aimodels.fyi/papers/arxiv/como-compact-mapping-odometry">Further research could explore the integration of this approach with other sensing modalities or its application to different robot platforms and environments</a>, expanding the capabilities of autonomous systems in real-world scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

2DLIW-SLAM:2D LiDAR-Inertial-Wheel Odometry with Real-Time Loop Closure
Bin Zhang, Zexin Peng, Bi Zeng, Junjie Lu
0
0
Due to budgetary constraints, indoor navigation typically employs 2D LiDAR rather than 3D LiDAR. However, the utilization of 2D LiDAR in Simultaneous Localization And Mapping (SLAM) frequently encounters challenges related to motion degeneracy, particularly in geometrically similar environments. To address this problem, this paper proposes a robust, accurate, and multi-sensor-fused 2D LiDAR SLAM system specifically designed for indoor mobile robots. To commence, the original LiDAR data undergoes meticulous processing through point and line extraction. Leveraging the distinctive characteristics of indoor environments, line-line constraints are established to complement other sensor data effectively, thereby augmenting the overall robustness and precision of the system. Concurrently, a tightly-coupled front-end is created, integrating data from the 2D LiDAR, IMU, and wheel odometry, thus enabling real-time state estimation. Building upon this solid foundation, a novel global feature point matching-based loop closure detection algorithm is proposed. This algorithm proves highly effective in mitigating front-end accumulated errors and ultimately constructs a globally consistent map. The experimental results indicate that our system fully meets real-time requirements. When compared to Cartographer, our system not only exhibits lower trajectory errors but also demonstrates stronger robustness, particularly in degeneracy problem.
4/24/2024
📈
Online Calibration of a Single-Track Ground Vehicle Dynamics Model by Tight Fusion with Visual-Inertial Odometry
Haolong Li, Joerg Stueckler
0
0
Wheeled mobile robots need the ability to estimate their motion and the effect of their control actions for navigation planning. In this paper, we present ST-VIO, a novel approach which tightly fuses a single-track dynamics model for wheeled ground vehicles with visual inertial odometry (VIO). Our method calibrates and adapts the dynamics model online to improve the accuracy of forward prediction conditioned on future control inputs. The single-track dynamics model approximates wheeled vehicle motion under specific control inputs on flat ground using ordinary differential equations. We use a singularity-free and differentiable variant of the single-track model to enable seamless integration as dynamics factor into VIO and to optimize the model parameters online together with the VIO state variables. We validate our method with real-world data in both indoor and outdoor environments with different terrain types and wheels. In experiments, we demonstrate that ST-VIO can not only adapt to wheel or ground changes and improve the accuracy of prediction under new control inputs, but can even improve tracking accuracy.
5/29/2024
MAD-ICP: It Is All About Matching Data -- Robust and Informed LiDAR Odometry
Simone Ferrari, Luca Di Giammarino, Leonardo Brizi, Giorgio Grisetti
0
0
LiDAR odometry is the task of estimating the ego-motion of the sensor from sequential laser scans. This problem has been addressed by the community for more than two decades, and many effective solutions are available nowadays. Most of these systems implicitly rely on assumptions about the operating environment, the sensor used, and motion pattern. When these assumptions are violated, several well-known systems tend to perform poorly. This paper presents a LiDAR odometry system that can overcome these limitations and operate well under different operating conditions while achieving performance comparable with domain-specific methods. Our algorithm follows the well-known ICP paradigm that leverages a PCA-based kd-tree implementation that is used to extract structural information about the clouds being registered and to compute the minimization metric for the alignment. The drift is bound by managing the local map based on the estimated uncertainty of the tracked pose. To benefit the community, we release an open-source C++ anytime real-time implementation.
5/10/2024

Adaptive LiDAR-Radar Fusion for Outdoor Odometry Across Dense Smoke Conditions
Chiyun Noh, Ayoung Kim
0
0
Robust odometry estimation in perceptually degraded environments represents a key challenge in the field of robotics. In this paper, we propose a LiDAR-radar fusion method for robust odometry for adverse environment with LiDAR degeneracy. By comparing the LiDAR point cloud with the radar static point cloud obtained through preprocessing module, it is possible to identify instances of LiDAR degeneracy to overcome perceptual limits. We demonstrate the effectiveness of our method in challenging conditions such as dense smoke, showcasing its ability to reliably estimate odometry and identify/remove dynamic points prone to LiDAR degeneracy.
4/22/2024