3D Gaussian Splatting for Large-scale 3D Surface Reconstruction from Aerial Images

0
Sign in to get full access
Overview
- The paper presents a 3D Gaussian splatting approach for large-scale 3D surface reconstruction from aerial images.
- This technique is designed to handle the challenges of reconstructing 3D surfaces from oblique aerial photography, such as occlusions, large-scale scenes, and sparse data.
- The method uses a probabilistic splatting model to fuse 3D information from multiple views, capturing the uncertainty in the reconstructed surface.
Plain English Explanation
The researchers have developed a new way to create detailed 3D models of large outdoor areas using aerial photographs. This is a challenging task because the photos can have gaps and occlusions, and the scenes being captured are very large.
Their 3D Gaussian splatting approach works by taking multiple aerial photos of an area and combining the 3D information from each one. It does this using a statistical model that accounts for the uncertainty in the 3D data from each photo. This allows the method to handle missing information and create a complete, high-quality 3D surface model.
The key advantage of this approach is that it can reconstruct large-scale 3D scenes from aerial imagery, even when the data is sparse or contains occlusions. This makes it well-suited for applications like city planning, infrastructure management, and environmental monitoring using drone or satellite imagery.
Technical Explanation
The paper introduces a 3D Gaussian splatting approach for large-scale 3D surface reconstruction from aerial imagery. The method works by fusing 3D information from multiple oblique aerial views into a probabilistic 3D surface representation.
The core of the approach is a Gaussian splatting model that represents each 3D point as a Gaussian distribution. This captures the uncertainty in the 3D data and allows the method to handle occlusions and sparse coverage.
The 3D Gaussian splats are then accumulated into a 3D voxel grid, where each voxel stores a Gaussian mixture model representing the probability distribution of the underlying surface. This allows the final 3D surface to be extracted using a probabilistic marching cubes algorithm.
The authors demonstrate the effectiveness of their approach on large-scale 3D reconstruction tasks using aerial imagery, showing how it can handle challenging scenarios with occlusions and sparse data better than traditional methods. The Gaussian splatting framework is a key technical contribution that enables robust and scalable 3D reconstruction from real-world aerial imagery.
Critical Analysis
The paper presents a compelling approach to 3D surface reconstruction from aerial imagery, addressing key challenges like occlusions and sparse data coverage. The Gaussian splatting model is a well-designed solution that effectively captures the uncertainty in the 3D data.
One potential limitation is that the method relies on accurate camera calibration and pose estimation, which can be error-prone in real-world aerial imagery. The authors acknowledge this and suggest incorporating bundle adjustment or other techniques to improve the underlying 3D data quality.
Additionally, while the results demonstrate the method's effectiveness on large-scale scenes, the computational complexity of the Gaussian mixture model representation may limit its scalability to truly massive datasets. Further optimizations or approximations could help address this.
Overall, the 3D Gaussian splatting approach represents a significant advance in 3D reconstruction from aerial imagery, with potential applications in urban planning, infrastructure monitoring, and environmental modeling. The technical insights and probabilistic framework presented in this paper could also inspire further research in this area.
Conclusion
This paper introduces a novel 3D Gaussian splatting approach for large-scale 3D surface reconstruction from aerial imagery. The key contributions are the Gaussian splatting model, which effectively fuses 3D data from multiple views while accounting for uncertainty, and the probabilistic surface extraction algorithm.
The results demonstrate the method's ability to handle challenging scenarios with occlusions and sparse data, making it well-suited for real-world applications in areas like urban planning and infrastructure management. While some limitations exist, the technical innovations presented in this work represent an important step forward in 3D reconstruction from aerial imagery.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
3D Gaussian Splatting for Large-scale 3D Surface Reconstruction from Aerial Images
YuanZheng Wu, Jin Liu, Shunping Ji
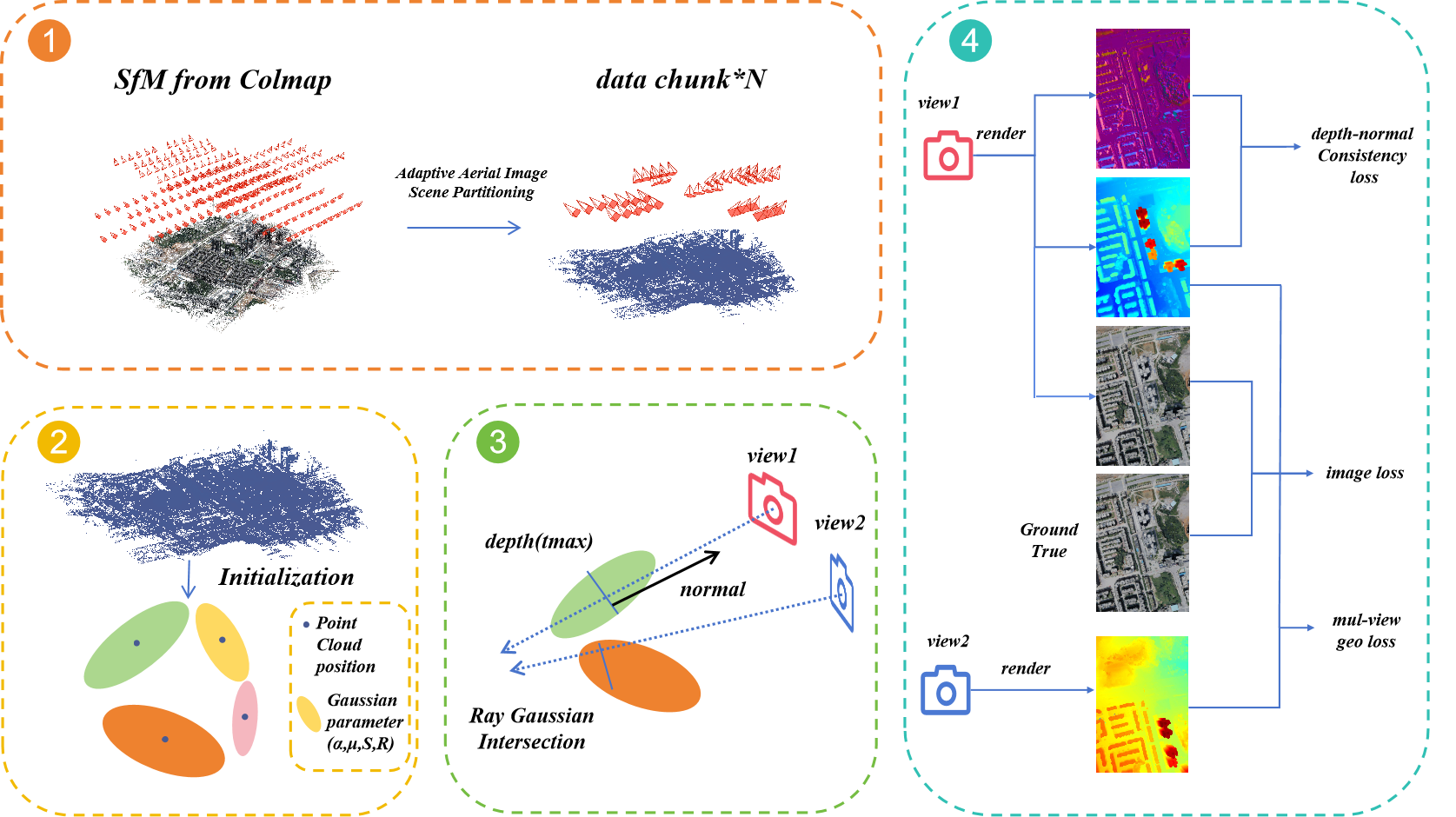
Recently, 3D Gaussian Splatting (3DGS) has garnered significant attention. However, the unstructured nature of 3DGS poses challenges for large-scale surface reconstruction from aerial images. To address this gap, we propose the first large-scale surface reconstruction method for multi-view stereo (MVS) aerial images based on 3DGS, named Aerial Gaussian Splatting (AGS). Initially, we introduce a data chunking method tailored for large-scale aerial imagery, making the modern 3DGS technology feasible for surface reconstruction over extensive scenes. Additionally, we integrate the Ray-Gaussian Intersection method to obtain normal and depth information, facilitating geometric constraints. Finally, we introduce a multi-view geometric consistency constraint to enhance global geometric consistency and improve reconstruction accuracy. Our experiments on multiple datasets demonstrate for the first time that the GS-based technique can match traditional aerial MVS methods on geometric accuracy, and beat state-of-the-art GS-based methods on geometry and rendering quality.
Read more9/9/2024

0
GigaGS: Scaling up Planar-Based 3D Gaussians for Large Scene Surface Reconstruction
Junyi Chen, Weicai Ye, Yifan Wang, Danpeng Chen, Di Huang, Wanli Ouyang, Guofeng Zhang, Yu Qiao, Tong He
3D Gaussian Splatting (3DGS) has shown promising performance in novel view synthesis. Previous methods adapt it to obtaining surfaces of either individual 3D objects or within limited scenes. In this paper, we make the first attempt to tackle the challenging task of large-scale scene surface reconstruction. This task is particularly difficult due to the high GPU memory consumption, different levels of details for geometric representation, and noticeable inconsistencies in appearance. To this end, we propose GigaGS, the first work for high-quality surface reconstruction for large-scale scenes using 3DGS. GigaGS first applies a partitioning strategy based on the mutual visibility of spatial regions, which effectively grouping cameras for parallel processing. To enhance the quality of the surface, we also propose novel multi-view photometric and geometric consistency constraints based on Level-of-Detail representation. In doing so, our method can reconstruct detailed surface structures. Comprehensive experiments are conducted on various datasets. The consistent improvement demonstrates the superiority of GigaGS.
Read more9/11/2024

0
PGSR: Planar-based Gaussian Splatting for Efficient and High-Fidelity Surface Reconstruction
Danpeng Chen, Hai Li, Weicai Ye, Yifan Wang, Weijian Xie, Shangjin Zhai, Nan Wang, Haomin Liu, Hujun Bao, Guofeng Zhang
Recently, 3D Gaussian Splatting (3DGS) has attracted widespread attention due to its high-quality rendering, and ultra-fast training and rendering speed. However, due to the unstructured and irregular nature of Gaussian point clouds, it is difficult to guarantee geometric reconstruction accuracy and multi-view consistency simply by relying on image reconstruction loss. Although many studies on surface reconstruction based on 3DGS have emerged recently, the quality of their meshes is generally unsatisfactory. To address this problem, we propose a fast planar-based Gaussian splatting reconstruction representation (PGSR) to achieve high-fidelity surface reconstruction while ensuring high-quality rendering. Specifically, we first introduce an unbiased depth rendering method, which directly renders the distance from the camera origin to the Gaussian plane and the corresponding normal map based on the Gaussian distribution of the point cloud, and divides the two to obtain the unbiased depth. We then introduce single-view geometric, multi-view photometric, and geometric regularization to preserve global geometric accuracy. We also propose a camera exposure compensation model to cope with scenes with large illumination variations. Experiments on indoor and outdoor scenes show that our method achieves fast training and rendering while maintaining high-fidelity rendering and geometric reconstruction, outperforming 3DGS-based and NeRF-based methods.
Read more6/11/2024
🗣️
0
RoGS: Large Scale Road Surface Reconstruction based on 2D Gaussian Splatting
Zhiheng Feng, Wenhua Wu, Hesheng Wang
Road surface reconstruction plays a crucial role in autonomous driving, which can be used for road lane perception and autolabeling tasks. Recently, mesh-based road surface reconstruction algorithms show promising reconstruction results. However, these mesh-based methods suffer from slow speed and poor rendering quality. In contrast, the 3D Gaussian Splatting (3DGS) shows superior rendering speed and quality. Although 3DGS employs explicit Gaussian spheres to represent the scene, it lacks the ability to directly represent the geometric information of the scene. To address this limitation, we propose a novel large-scale road surface reconstruction approach based on 2D Gaussian Splatting (2DGS), named RoGS. The geometric shape of the road is explicitly represented using 2D Gaussian surfels, where each surfel stores color, semantics, and geometric information. Compared to Gaussian spheres, the Gaussian surfels aligns more closely with the physical reality of the road. Distinct from previous initialization methods that rely on point clouds for Gaussian spheres, we introduce a trajectory-based initialization for Gaussian surfels. Thanks to the explicit representation of the Gaussian surfels and a good initialization, our method achieves a significant acceleration while improving reconstruction quality. We achieve excellent results in reconstruction of roads surfaces in a variety of challenging real-world scenes.
Read more5/27/2024