RoGS: Large Scale Road Surface Reconstruction based on 2D Gaussian Splatting

0
🗣️
Sign in to get full access
Overview
- Road surface reconstruction is crucial for autonomous driving, enabling tasks like road lane perception and autolabeling.
- Mesh-based road surface reconstruction algorithms have shown promising results but suffer from slow speed and poor rendering quality.
- In contrast, 3D Gaussian Splatting (3DGS) offers superior rendering speed and quality.
- However, 3DGS lacks the ability to directly represent the geometric information of the scene.
- To address this limitation, the proposed approach, RoGS, uses 2D Gaussian Splatting (2DGS) to explicitly represent the geometric shape of the road.
Plain English Explanation
Road surface reconstruction is an important task for self-driving cars, as it helps them understand the layout of the road and identify things like lane markings. Traditional mesh-based methods can reconstruct the road surface, but they tend to be slow and produce low-quality visuals.
An alternative approach called 3D Gaussian Splatting (3DGS) is faster and produces better-looking results. 3DGS uses Gaussian "spheres" to represent the scene, which allows for efficient rendering. However, these Gaussian spheres don't directly capture the actual shape of the road.
The new RoGS method tackles this by using 2D Gaussian "surfaces" instead of 3D spheres. These surfaces can more accurately represent the flat, planar geometry of a road. RoGS also introduces a new way to initialize these Gaussian surfaces using the vehicle's trajectory, rather than relying on point cloud data.
The result is a road reconstruction system that is both fast and accurately captures the road's shape, which is important for autonomous driving applications like lane detection.
Technical Explanation
The RoGS approach represents the road surface using 2D Gaussian surfels (surface elements), where each surfel stores color, semantic, and geometric information. This explicit representation aligns more closely with the physical reality of the road, compared to the Gaussian spheres used in previous 3DGS methods.
Unlike prior initialization methods that relied on point clouds, RoGS introduces a trajectory-based initialization for the Gaussian surfels. This allows the system to quickly and accurately estimate the road's geometry without requiring a dense point cloud.
The explicit representation of the Gaussian surfels, combined with the effective initialization, enables RoGS to achieve significant acceleration in road surface reconstruction while improving the overall reconstruction quality. The authors demonstrate excellent results in reconstructing road surfaces across a variety of challenging real-world scenes.
Critical Analysis
The RoGS approach addresses an important limitation of previous 3DGS methods by more accurately representing the road's geometry. This is a valuable advancement, as precise reconstruction of the road surface is crucial for autonomous driving applications like lane detection and mapping.
However, the paper does not provide a comparative analysis of RoGS against other state-of-the-art road reconstruction techniques beyond 3DGS. It would be helpful to see how RoGS performs relative to mesh-based or other point cloud-based methods in terms of reconstruction accuracy, computational efficiency, and real-world applicability.
Additionally, the authors mention that RoGS achieves "excellent results" but do not provide detailed quantitative metrics to support this claim. A more thorough evaluation with clear performance benchmarks would strengthen the findings and allow readers to better assess the merits of the proposed approach.
Conclusion
The RoGS method presents a novel approach to large-scale road surface reconstruction that explicitly represents the geometric shape of the road using 2D Gaussian surfels. By introducing a trajectory-based initialization, RoGS achieves significant acceleration in reconstruction speed while improving the overall quality compared to previous 3DGS methods.
This work contributes to the ongoing efforts to enhance autonomous driving capabilities, particularly in the realm of road perception and mapping. The ability to quickly and accurately reconstruct road surfaces is a crucial enabler for various self-driving car applications, making the RoGS approach a valuable addition to the field.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🗣️
0
RoGS: Large Scale Road Surface Reconstruction based on 2D Gaussian Splatting
Zhiheng Feng, Wenhua Wu, Hesheng Wang
Road surface reconstruction plays a crucial role in autonomous driving, which can be used for road lane perception and autolabeling tasks. Recently, mesh-based road surface reconstruction algorithms show promising reconstruction results. However, these mesh-based methods suffer from slow speed and poor rendering quality. In contrast, the 3D Gaussian Splatting (3DGS) shows superior rendering speed and quality. Although 3DGS employs explicit Gaussian spheres to represent the scene, it lacks the ability to directly represent the geometric information of the scene. To address this limitation, we propose a novel large-scale road surface reconstruction approach based on 2D Gaussian Splatting (2DGS), named RoGS. The geometric shape of the road is explicitly represented using 2D Gaussian surfels, where each surfel stores color, semantics, and geometric information. Compared to Gaussian spheres, the Gaussian surfels aligns more closely with the physical reality of the road. Distinct from previous initialization methods that rely on point clouds for Gaussian spheres, we introduce a trajectory-based initialization for Gaussian surfels. Thanks to the explicit representation of the Gaussian surfels and a good initialization, our method achieves a significant acceleration while improving reconstruction quality. We achieve excellent results in reconstruction of roads surfaces in a variety of challenging real-world scenes.
Read more5/27/2024
0
3D Gaussian Splatting for Large-scale 3D Surface Reconstruction from Aerial Images
YuanZheng Wu, Jin Liu, Shunping Ji
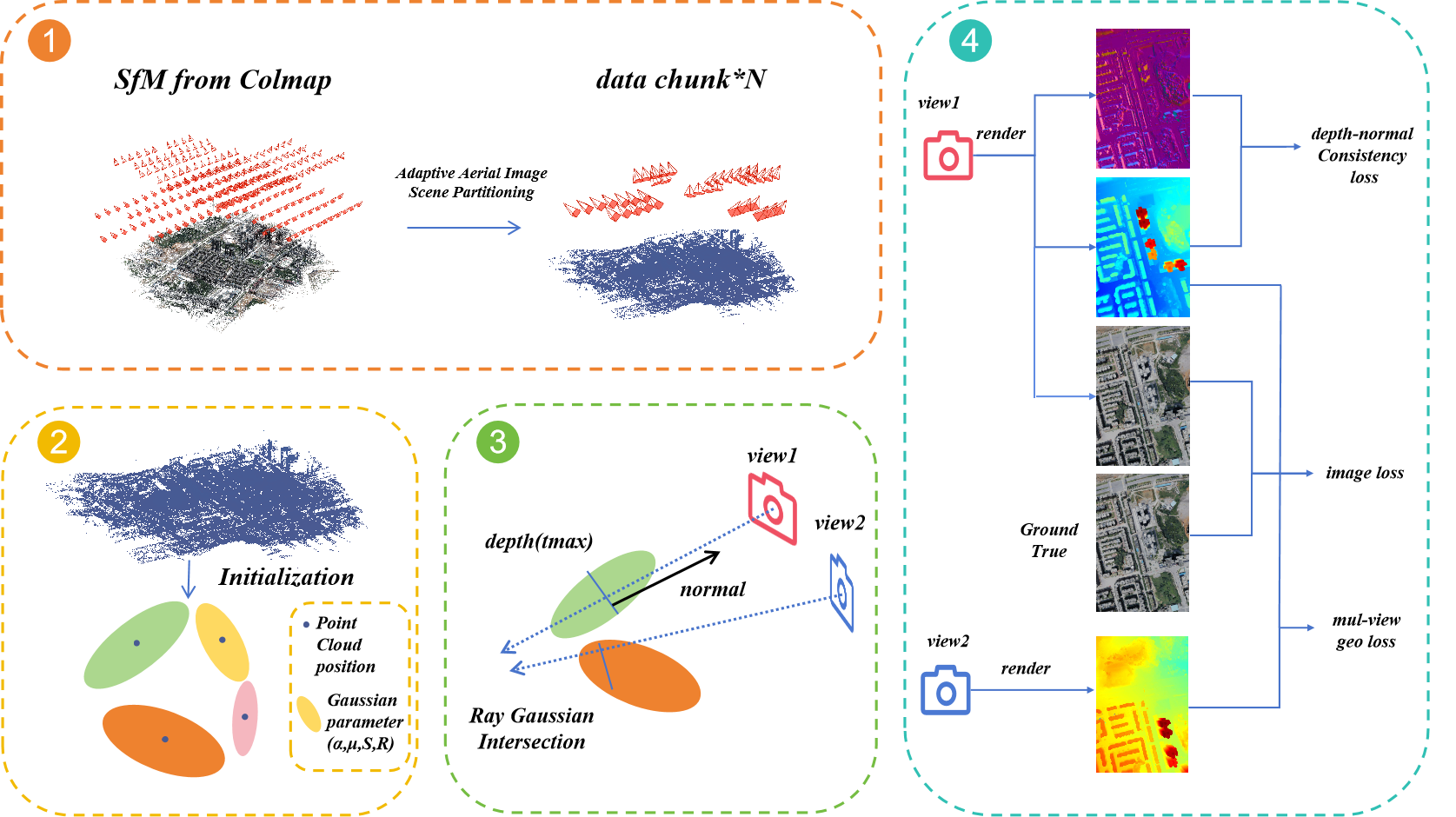
Recently, 3D Gaussian Splatting (3DGS) has garnered significant attention. However, the unstructured nature of 3DGS poses challenges for large-scale surface reconstruction from aerial images. To address this gap, we propose the first large-scale surface reconstruction method for multi-view stereo (MVS) aerial images based on 3DGS, named Aerial Gaussian Splatting (AGS). Initially, we introduce a data chunking method tailored for large-scale aerial imagery, making the modern 3DGS technology feasible for surface reconstruction over extensive scenes. Additionally, we integrate the Ray-Gaussian Intersection method to obtain normal and depth information, facilitating geometric constraints. Finally, we introduce a multi-view geometric consistency constraint to enhance global geometric consistency and improve reconstruction accuracy. Our experiments on multiple datasets demonstrate for the first time that the GS-based technique can match traditional aerial MVS methods on geometric accuracy, and beat state-of-the-art GS-based methods on geometry and rendering quality.
Read more9/9/2024

0
PGSR: Planar-based Gaussian Splatting for Efficient and High-Fidelity Surface Reconstruction
Danpeng Chen, Hai Li, Weicai Ye, Yifan Wang, Weijian Xie, Shangjin Zhai, Nan Wang, Haomin Liu, Hujun Bao, Guofeng Zhang
Recently, 3D Gaussian Splatting (3DGS) has attracted widespread attention due to its high-quality rendering, and ultra-fast training and rendering speed. However, due to the unstructured and irregular nature of Gaussian point clouds, it is difficult to guarantee geometric reconstruction accuracy and multi-view consistency simply by relying on image reconstruction loss. Although many studies on surface reconstruction based on 3DGS have emerged recently, the quality of their meshes is generally unsatisfactory. To address this problem, we propose a fast planar-based Gaussian splatting reconstruction representation (PGSR) to achieve high-fidelity surface reconstruction while ensuring high-quality rendering. Specifically, we first introduce an unbiased depth rendering method, which directly renders the distance from the camera origin to the Gaussian plane and the corresponding normal map based on the Gaussian distribution of the point cloud, and divides the two to obtain the unbiased depth. We then introduce single-view geometric, multi-view photometric, and geometric regularization to preserve global geometric accuracy. We also propose a camera exposure compensation model to cope with scenes with large illumination variations. Experiments on indoor and outdoor scenes show that our method achieves fast training and rendering while maintaining high-fidelity rendering and geometric reconstruction, outperforming 3DGS-based and NeRF-based methods.
Read more6/11/2024
0
3D-HGS: 3D Half-Gaussian Splatting
Haolin Li, Jinyang Liu, Mario Sznaier, Octavia Camps
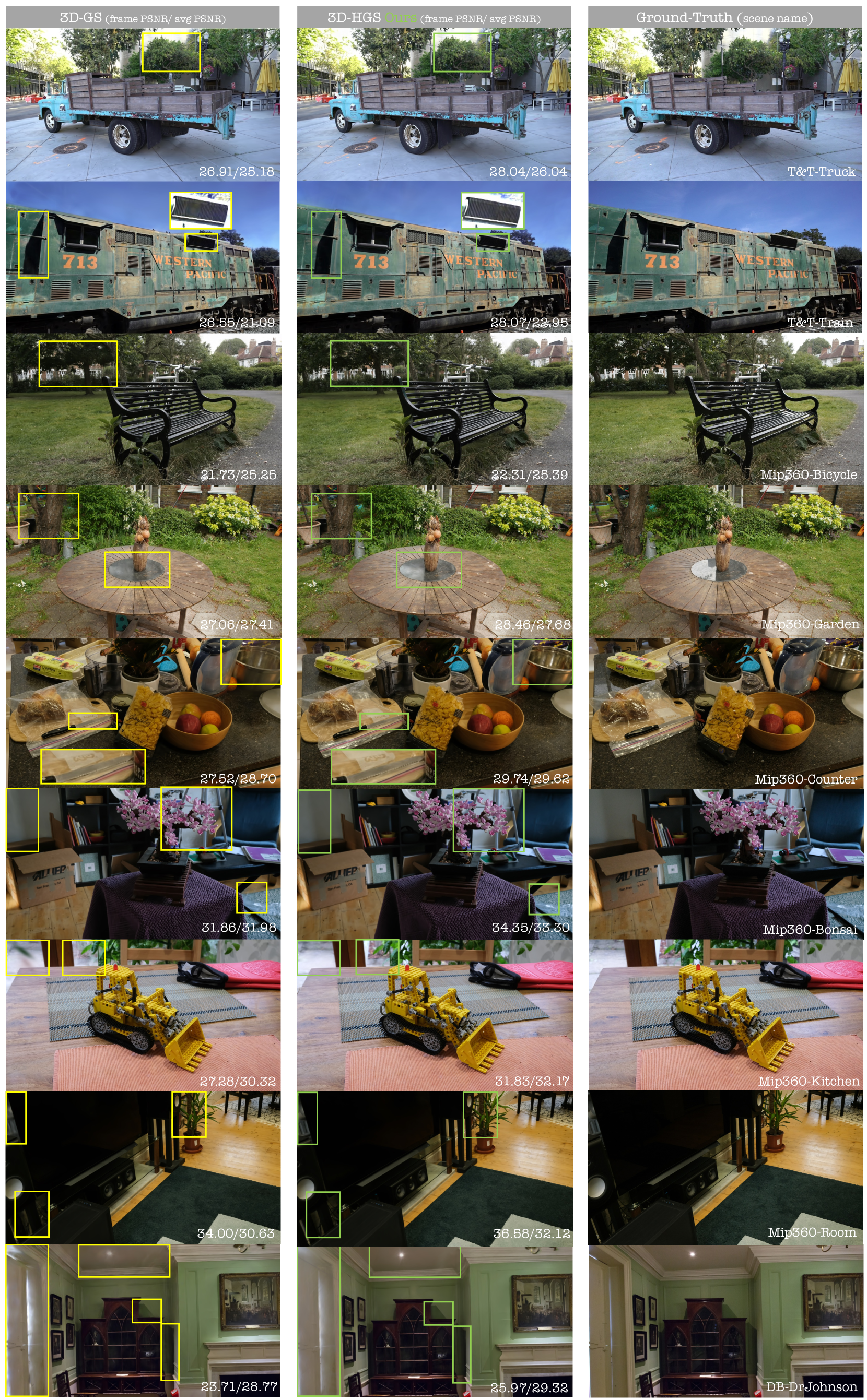
Photo-realistic 3D Reconstruction is a fundamental problem in 3D computer vision. This domain has seen considerable advancements owing to the advent of recent neural rendering techniques. These techniques predominantly aim to focus on learning volumetric representations of 3D scenes and refining these representations via loss functions derived from rendering. Among these, 3D Gaussian Splatting (3D-GS) has emerged as a significant method, surpassing Neural Radiance Fields (NeRFs). 3D-GS uses parameterized 3D Gaussians for modeling both spatial locations and color information, combined with a tile-based fast rendering technique. Despite its superior rendering performance and speed, the use of 3D Gaussian kernels has inherent limitations in accurately representing discontinuous functions, notably at edges and corners for shape discontinuities, and across varying textures for color discontinuities. To address this problem, we propose to employ 3D Half-Gaussian (3D-HGS) kernels, which can be used as a plug-and-play kernel. Our experiments demonstrate their capability to improve the performance of current 3D-GS related methods and achieve state-of-the-art rendering performance on various datasets without compromising rendering speed.
Read more6/17/2024