3D Reconstruction of Objects in Hands without Real World 3D Supervision

0
❗
Sign in to get full access
Overview
- This paper proposes a new approach for reconstructing the 3D shape of hand-held objects from a single RGB image.
- Existing methods rely on 3D supervision from paired 3D models, which is challenging to obtain at scale in the real world.
- The authors leverage alternative sources of 3D cues, including video data showing hand-object interactions and synthetic 3D shape collections.
- Their approach uses these indirect 3D signals to train occupancy networks that can predict 3D object shapes from a single input image.
- Experiments on a challenging in-the-wild dataset show an 11.6% relative improvement over models trained with direct 3D supervision.
Plain English Explanation
Reconstructing the 3D shape of objects held in a person's hand from a single 2D image is a challenging computer vision task. Previous approaches have relied on training machine learning models using a dataset of 2D images paired with the corresponding 3D object shapes. However, gathering this kind of paired 3D data in the real world at a large scale is very difficult.
To address this limitation, the researchers in this paper propose a new method that can learn to predict 3D object shapes from single 2D images without needing the same kind of 3D supervision. Instead, they leverage other available sources of 3D information, such as video recordings of people interacting with objects, and existing 3D shape datasets.
From the video data, they extract 2D information about the object's silhouette and how it moves with the hand. And from the 3D shape datasets, they extract general knowledge about the 3D structure of different types of objects. They use these indirect 3D cues to train a machine learning model called an "occupancy network" that can predict the full 3D shape of an object just from a single 2D image.
The key insight is that these alternative 3D signals, while not as direct as the paired 3D data, can still provide valuable information to help the model learn how to reconstruct 3D object shapes. This allows the model to generalize better to new objects encountered "in the wild", without needing the same restrictive 3D data that previous methods required.
Technical Explanation
The paper presents a novel approach for reconstructing the 3D shape of hand-held objects from a single RGB image. Prior work in this area has relied on training models using datasets of 2D images paired with their corresponding 3D object shapes. However, obtaining such paired 3D data at scale in the real world is extremely challenging.
To address this limitation, the authors leverage alternative sources of 3D cues that are more readily available. Specifically, they make use of:
- Multiview 2D mask supervision extracted from in-the-wild video data showing hand-object interactions
- 3D shape priors learned from synthetic 3D shape collections
They incorporate these indirect 3D signals into the training of occupancy networks - a type of neural network architecture that can predict the full 3D shape of an object from a single 2D input image. The key intuition is that while these 3D cues are not as direct as paired 3D data, they can still provide valuable structural information to guide the model's learning.
The authors evaluate their approach on the challenging MOW dataset, which contains in-the-wild images of hand-held objects. Their experiments show an 11.6% relative improvement in 3D reconstruction performance over models trained solely with direct 3D supervision.
Critical Analysis
The paper presents a compelling approach to address a key limitation of prior work on 3D object reconstruction from single images - the heavy reliance on paired 3D data, which is difficult to obtain at scale in the real world.
By leveraging alternative sources of 3D cues, such as video data and synthetic shape collections, the authors demonstrate that it is possible to train effective 3D reconstruction models without the same level of direct 3D supervision. This is an important step towards developing more generalizable and practical solutions for this problem.
That said, the paper does not explore the potential limitations or edge cases of their approach. For example, it is unclear how the performance of their method would scale to a more diverse set of object categories, or how sensitive the approach is to the quality and coverage of the video and shape data used for training.
Additionally, the paper does not provide much insight into the internal workings of the occupancy network model, or how the different 3D cues are integrated to produce the final 3D predictions. A more detailed analysis of the model's architecture and training process could help build a deeper understanding of its strengths and weaknesses.
Overall, the research presented in this paper represents an important step forward in 3D object reconstruction from single images. However, further exploration of the method's limitations and failure modes could help identify areas for improvement and guide future work in this direction.
Conclusion
This paper introduces a novel approach for reconstructing the 3D shape of hand-held objects from a single RGB image. Unlike previous methods that relied on paired 3D data, which is challenging to obtain at scale, the proposed technique leverages alternative sources of 3D cues, including video data and synthetic 3D shape collections.
By incorporating these indirect 3D signals into the training of occupancy networks, the authors demonstrate an 11.6% relative improvement in 3D reconstruction performance on a challenging in-the-wild dataset, compared to models trained with direct 3D supervision.
This work represents an important advancement in the field of 3D object reconstruction, as it shows how alternative sources of 3D information can be harnessed to develop more scalable and generalizable solutions. Further exploration of the method's limitations and potential extensions could lead to even more robust and practical systems for 3D object understanding from monocular images.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
❗
0
3D Reconstruction of Objects in Hands without Real World 3D Supervision
Aditya Prakash, Matthew Chang, Matthew Jin, Ruisen Tu, Saurabh Gupta
Prior works for reconstructing hand-held objects from a single image train models on images paired with 3D shapes. Such data is challenging to gather in the real world at scale. Consequently, these approaches do not generalize well when presented with novel objects in in-the-wild settings. While 3D supervision is a major bottleneck, there is an abundance of a) in-the-wild raw video data showing hand-object interactions and b) synthetic 3D shape collections. In this paper, we propose modules to leverage 3D supervision from these sources to scale up the learning of models for reconstructing hand-held objects. Specifically, we extract multiview 2D mask supervision from videos and 3D shape priors from shape collections. We use these indirect 3D cues to train occupancy networks that predict the 3D shape of objects from a single RGB image. Our experiments in the challenging object generalization setting on in-the-wild MOW dataset show 11.6% relative improvement over models trained with 3D supervision on existing datasets.
Read more9/24/2024
0
Reconstructing Hand-Held Objects in 3D
Jane Wu, Georgios Pavlakos, Georgia Gkioxari, Jitendra Malik
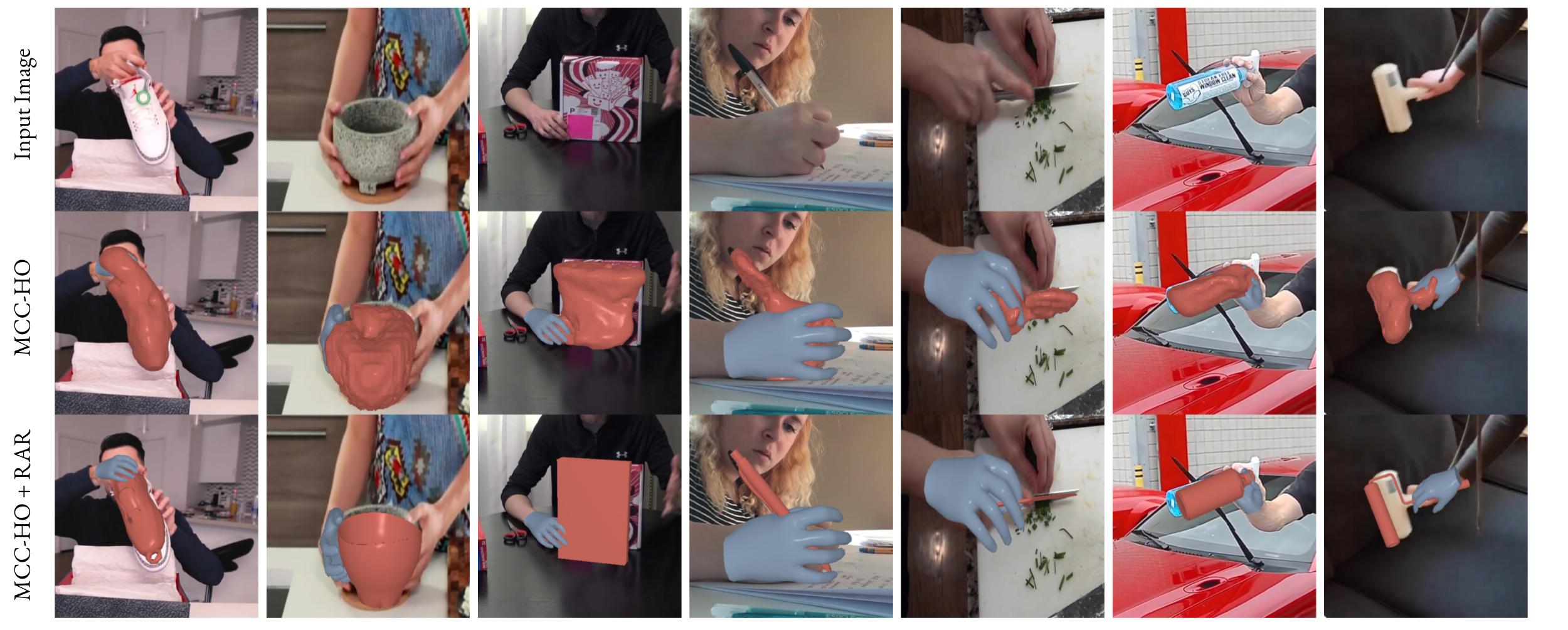
Objects manipulated by the hand (i.e., manipulanda) are particularly challenging to reconstruct from in-the-wild RGB images or videos. Not only does the hand occlude much of the object, but also the object is often only visible in a small number of image pixels. At the same time, two strong anchors emerge in this setting: (1) estimated 3D hands help disambiguate the location and scale of the object, and (2) the set of manipulanda is small relative to all possible objects. With these insights in mind, we present a scalable paradigm for handheld object reconstruction that builds on recent breakthroughs in large language/vision models and 3D object datasets. Our model, MCC-Hand-Object (MCC-HO), jointly reconstructs hand and object geometry given a single RGB image and inferred 3D hand as inputs. Subsequently, we use GPT-4(V) to retrieve a 3D object model that matches the object in the image and rigidly align the model to the network-inferred geometry; we call this alignment Retrieval-Augmented Reconstruction (RAR). Experiments demonstrate that MCC-HO achieves state-of-the-art performance on lab and Internet datasets, and we show how RAR can be used to automatically obtain 3D labels for in-the-wild images of hand-object interactions.
Read more4/11/2024

0
Monocular Human-Object Reconstruction in the Wild
Chaofan Huo, Ye Shi, Jingya Wang
Learning the prior knowledge of the 3D human-object spatial relation is crucial for reconstructing human-object interaction from images and understanding how humans interact with objects in 3D space. Previous works learn this prior from datasets collected in controlled environments, but due to the diversity of domains, they struggle to generalize to real-world scenarios. To overcome this limitation, we present a 2D-supervised method that learns the 3D human-object spatial relation prior purely from 2D images in the wild. Our method utilizes a flow-based neural network to learn the prior distribution of the 2D human-object keypoint layout and viewports for each image in the dataset. The effectiveness of the prior learned from 2D images is demonstrated on the human-object reconstruction task by applying the prior to tune the relative pose between the human and the object during the post-optimization stage. To validate and benchmark our method on in-the-wild images, we collect the WildHOI dataset from the YouTube website, which consists of various interactions with 8 objects in real-world scenarios. We conduct the experiments on the indoor BEHAVE dataset and the outdoor WildHOI dataset. The results show that our method achieves almost comparable performance with fully 3D supervised methods on the BEHAVE dataset, even if we have only utilized the 2D layout information, and outperforms previous methods in terms of generality and interaction diversity on in-the-wild images.
Read more8/1/2024

0
Weakly-Supervised 3D Hand Reconstruction with Knowledge Prior and Uncertainty Guidance
Yufei Zhang, Jeffrey O. Kephart, Qiang Ji
Fully-supervised monocular 3D hand reconstruction is often difficult because capturing the requisite 3D data entails deploying specialized equipment in a controlled environment. We introduce a weakly-supervised method that avoids such requirements by leveraging fundamental principles well-established in the understanding of the human hand's unique structure and functionality. Specifically, we systematically study hand knowledge from different sources, including biomechanics, functional anatomy, and physics. We effectively incorporate these valuable foundational insights into 3D hand reconstruction models through an appropriate set of differentiable training losses. This enables training solely with readily-obtainable 2D hand landmark annotations and eliminates the need for expensive 3D supervision. Moreover, we explicitly model the uncertainty that is inherent in image observations. We enhance the training process by exploiting a simple yet effective Negative Log Likelihood (NLL) loss that incorporates uncertainty into the loss function. Through extensive experiments, we demonstrate that our method significantly outperforms state-of-the-art weakly-supervised methods. For example, our method achieves nearly a 21% performance improvement on the widely adopted FreiHAND dataset.
Read more7/18/2024