4D Millimeter-Wave Radar in Autonomous Driving: A Survey
2306.04242
0
0
📉
Abstract
The 4D millimeter-wave (mmWave) radar, proficient in measuring the range, azimuth, elevation, and velocity of targets, has attracted considerable interest within the autonomous driving community. This is attributed to its robustness in extreme environments and the velocity and elevation measurement capabilities. However, despite the rapid advancement in research related to its sensing theory and application, there is a conspicuous absence of comprehensive surveys on the subject of 4D mmWave radar. In an effort to bridge this gap and stimulate future research, this paper presents an exhaustive survey on the utilization of 4D mmWave radar in autonomous driving. Initially, the paper provides reviews on the theoretical background and progress of 4D mmWave radars, encompassing aspects such as the signal processing workflow, resolution improvement approaches, and extrinsic calibration process. Learning-based radar data quality improvement methods are present following. Then, this paper introduces relevant datasets and application algorithms in autonomous driving perception, localization and mapping tasks. Finally, this paper concludes by forecasting future trends in the realm of 4D mmWave radar in autonomous driving. To the best of our knowledge, this is the first survey specifically dedicated to the 4D mmWave radar in autonomous driving.
Create account to get full access
Overview
- The paper provides a comprehensive survey on the use of 4D millimeter-wave (mmWave) radar in autonomous driving applications.
- 4D mmWave radar can measure the range, azimuth, elevation, and velocity of targets, making it a valuable tool for autonomous vehicles.
- Despite the rapid advancements in 4D mmWave radar research, a comprehensive survey on the topic was previously lacking.
Plain English Explanation
4D mmWave radar is a type of sensor that can measure the distance, direction, and speed of objects around it. This technology has become increasingly important for autonomous driving, as it can help self-driving cars understand their surroundings and navigate safely, even in challenging environmental conditions.
The paper reviewed here aims to provide a thorough overview of the current state of 4D mmWave radar research and its applications in autonomous driving. It covers the underlying theory and technical progress of 4D mmWave radar, as well as methods for improving the quality of radar data and its use in perception, localization, and mapping tasks for autonomous vehicles.
By summarizing the latest developments in this field, the paper aims to help researchers and engineers better understand the capabilities of 4D mmWave radar and explore new ways to incorporate it into autonomous driving systems. This could lead to more reliable and robust self-driving car technologies in the future.
Technical Explanation
The paper begins by providing a thorough review of the theoretical foundations and technical advancements in 4D mmWave radar. This includes details on the signal processing workflow, approaches to improving the radar's resolution, and the extrinsic calibration process.
The paper then delves into learning-based methods for improving the quality of radar data, which can help enhance the performance of autonomous driving applications.
Next, the paper introduces relevant datasets and application algorithms that leverage 4D mmWave radar for tasks such as perception, localization, and mapping in autonomous driving.
The paper concludes by forecasting future trends in the use of 4D mmWave radar for autonomous driving, highlighting the potential for further advancements in this rapidly evolving field.
Critical Analysis
The paper provides a comprehensive and well-structured overview of the current state of 4D mmWave radar research and its applications in autonomous driving. It covers a wide range of topics, from the underlying theory to the practical implementation of this technology.
One potential limitation of the paper is that it does not delve too deeply into the specific limitations or challenges associated with 4D mmWave radar, such as its performance in certain environmental conditions or its integration with other sensor modalities. Additionally, the paper could have explored more potential future research directions beyond the trends it has identified.
Nevertheless, the paper serves as an excellent starting point for researchers and engineers interested in understanding the current state of 4D mmWave radar in autonomous driving. It provides a solid foundation for further exploration and innovation in this rapidly evolving field.
Conclusion
This paper presents a comprehensive survey on the use of 4D mmWave radar in autonomous driving applications. It covers the theoretical background, technical progress, and various applications of this technology, highlighting its importance for robust and reliable self-driving car systems.
By summarizing the latest advancements and identifying future research trends, the paper aims to stimulate further exploration and innovation in the field of 4D mmWave radar for autonomous driving. This could lead to the development of more advanced and capable self-driving technologies, ultimately improving the safety and efficiency of transportation systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
👁️
DenserRadar: A 4D millimeter-wave radar point cloud detector based on dense LiDAR point clouds
Zeyu Han, Junkai Jiang, Xiaokang Ding, Qingwen Meng, Shaobing Xu, Lei He, Jianqiang Wang
0
0
The 4D millimeter-wave (mmWave) radar, with its robustness in extreme environments, extensive detection range, and capabilities for measuring velocity and elevation, has demonstrated significant potential for enhancing the perception abilities of autonomous driving systems in corner-case scenarios. Nevertheless, the inherent sparsity and noise of 4D mmWave radar point clouds restrict its further development and practical application. In this paper, we introduce a novel 4D mmWave radar point cloud detector, which leverages high-resolution dense LiDAR point clouds. Our approach constructs dense 3D occupancy ground truth from stitched LiDAR point clouds, and employs a specially designed network named DenserRadar. The proposed method surpasses existing probability-based and learning-based radar point cloud detectors in terms of both point cloud density and accuracy on the K-Radar dataset.
5/9/2024
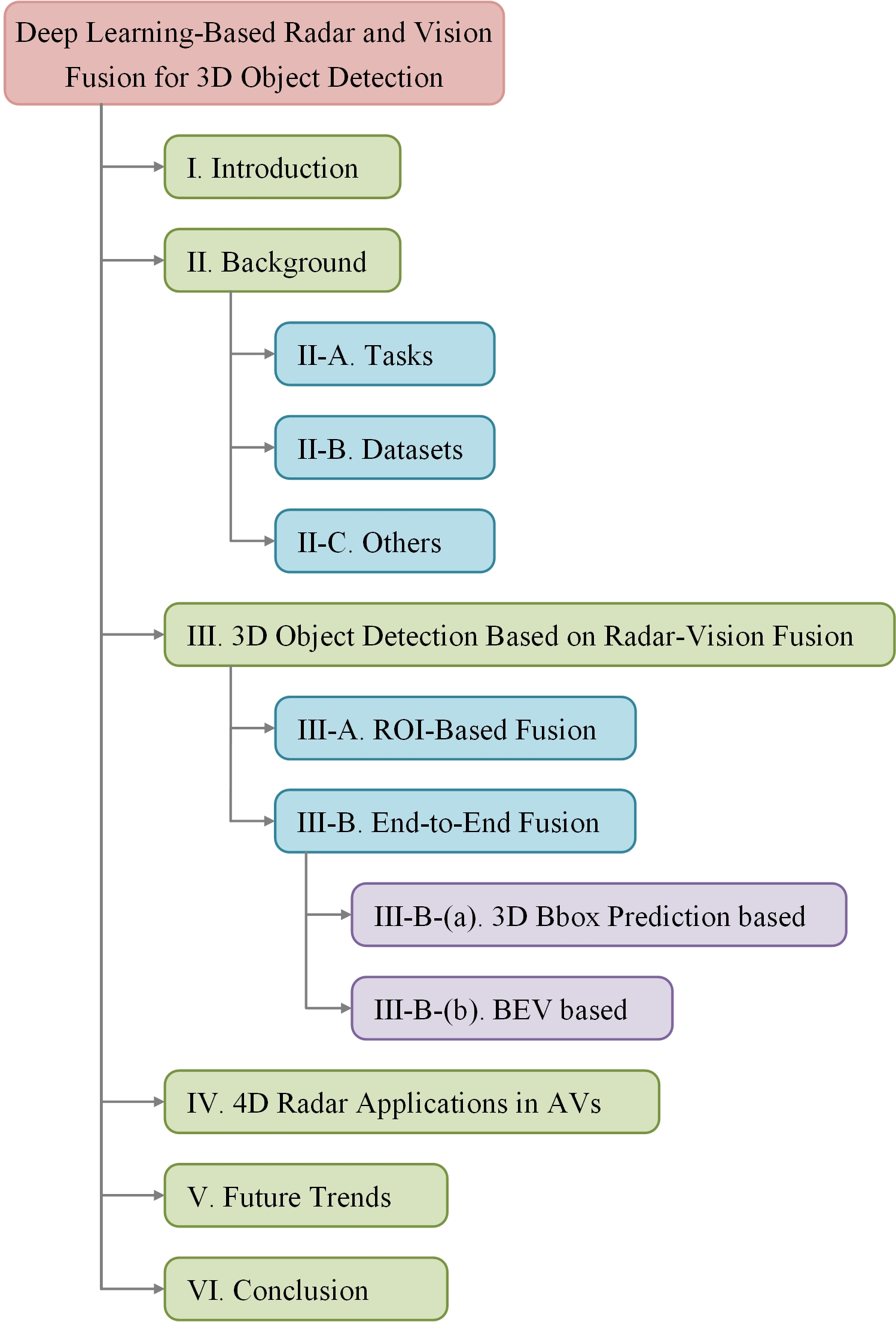
A Survey of Deep Learning Based Radar and Vision Fusion for 3D Object Detection in Autonomous Driving
Di Wu, Feng Yang, Benlian Xu, Pan Liao, Bo Liu
0
0
With the rapid advancement of autonomous driving technology, there is a growing need for enhanced safety and efficiency in the automatic environmental perception of vehicles during their operation. In modern vehicle setups, cameras and mmWave radar (radar), being the most extensively employed sensors, demonstrate complementary characteristics, inherently rendering them conducive to fusion and facilitating the achievement of both robust performance and cost-effectiveness. This paper focuses on a comprehensive survey of radar-vision (RV) fusion based on deep learning methods for 3D object detection in autonomous driving. We offer a comprehensive overview of each RV fusion category, specifically those employing region of interest (ROI) fusion and end-to-end fusion strategies. As the most promising fusion strategy at present, we provide a deeper classification of end-to-end fusion methods, including those 3D bounding box prediction based and BEV based approaches. Moreover, aligning with recent advancements, we delineate the latest information on 4D radar and its cutting-edge applications in autonomous vehicles (AVs). Finally, we present the possible future trends of RV fusion and summarize this paper.
6/4/2024
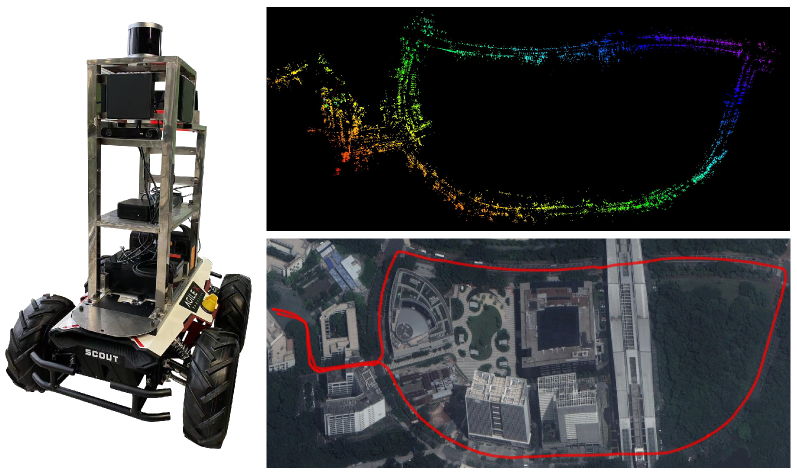
EFEAR-4D: Ego-Velocity Filtering for Efficient and Accurate 4D radar Odometry
Xiaoyi Wu, Yushuai Chen, Zhan Li, Ziyang Hong, Liang Hu
0
0
Odometry is a crucial component for successfully implementing autonomous navigation, relying on sensors such as cameras, LiDARs and IMUs. However, these sensors may encounter challenges in extreme weather conditions, such as snowfall and fog. The emergence of FMCW radar technology offers the potential for robust perception in adverse conditions. As the latest generation of FWCW radars, the 4D mmWave radar provides point cloud with range, azimuth, elevation, and Doppler velocity information, despite inherent sparsity and noises in the point cloud. In this paper, we propose EFEAR-4D, an accurate, highly efficient, and learning-free method for large-scale 4D radar odometry estimation. EFEAR-4D exploits Doppler velocity information delicately for robust ego-velocity estimation, resulting in a highly accurate prior guess. EFEAR-4D maintains robustness against point-cloud sparsity and noises across diverse environments through dynamic object removal and effective region-wise feature extraction. Extensive experiments on two publicly available 4D radar datasets demonstrate state-of-the-art reliability and localization accuracy of EFEAR-4D under various conditions. Furthermore, we have collected a dataset following the same route but varying installation heights of the 4D radar, emphasizing the significant impact of radar height on point cloud quality - a crucial consideration for real-world deployments. Our algorithm and dataset will be available soon at https://github.com/CLASS-Lab/EFEAR-4D.
5/17/2024
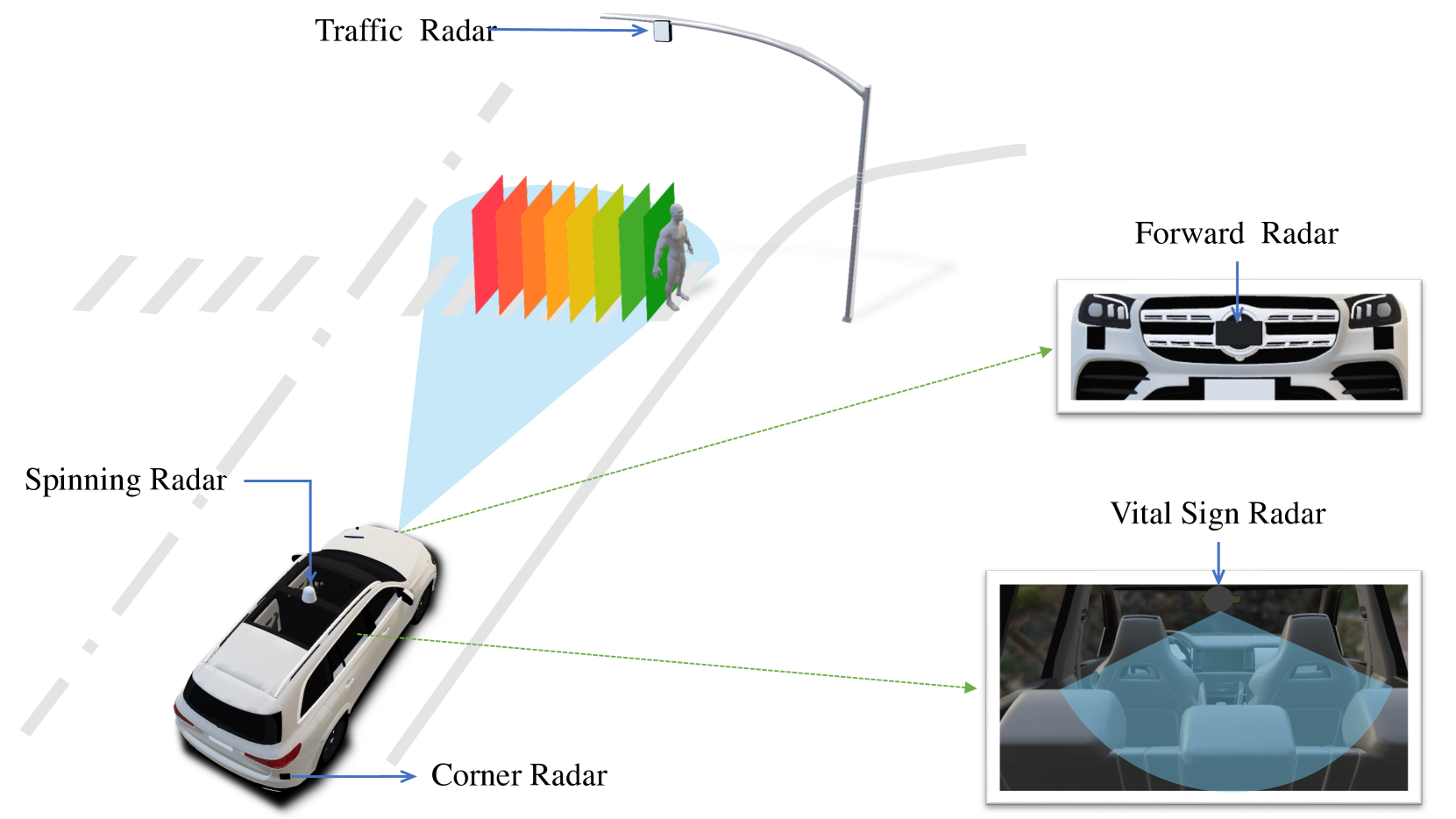
Exploring Radar Data Representations in Autonomous Driving: A Comprehensive Review
Shanliang Yao, Runwei Guan, Zitian Peng, Chenhang Xu, Yilu Shi, Weiping Ding, Eng Gee Lim, Yong Yue, Hyungjoon Seo, Ka Lok Man, Jieming Ma, Xiaohui Zhu, Yutao Yue
0
0
With the rapid advancements of sensor technology and deep learning, autonomous driving systems are providing safe and efficient access to intelligent vehicles as well as intelligent transportation. Among these equipped sensors, the radar sensor plays a crucial role in providing robust perception information in diverse environmental conditions. This review focuses on exploring different radar data representations utilized in autonomous driving systems. Firstly, we introduce the capabilities and limitations of the radar sensor by examining the working principles of radar perception and signal processing of radar measurements. Then, we delve into the generation process of five radar representations, including the ADC signal, radar tensor, point cloud, grid map, and micro-Doppler signature. For each radar representation, we examine the related datasets, methods, advantages and limitations. Furthermore, we discuss the challenges faced in these data representations and propose potential research directions. Above all, this comprehensive review offers an in-depth insight into how these representations enhance autonomous system capabilities, providing guidance for radar perception researchers. To facilitate retrieval and comparison of different data representations, datasets and methods, we provide an interactive website at https://radar-camera-fusion.github.io/radar.
4/22/2024