Human Detection from 4D Radar Data in Low-Visibility Field Conditions
2404.05307
0
0

Abstract
Autonomous driving technology is increasingly being used on public roads and in industrial settings such as mines. While it is essential to detect pedestrians, vehicles, or other obstacles, adverse field conditions negatively affect the performance of classical sensors such as cameras or lidars. Radar, on the other hand, is a promising modality that is less affected by, e.g., dust, smoke, water mist or fog. In particular, modern 4D imaging radars provide target responses across the range, vertical angle, horizontal angle and Doppler velocity dimensions. We propose TMVA4D, a CNN architecture that leverages this 4D radar modality for semantic segmentation. The CNN is trained to distinguish between the background and person classes based on a series of 2D projections of the 4D radar data that include the elevation, azimuth, range, and Doppler velocity dimensions. We also outline the process of compiling a novel dataset consisting of data collected in industrial settings with a car-mounted 4D radar and describe how the ground-truth labels were generated from reference thermal images. Using TMVA4D on this dataset, we achieve an mIoU score of 78.2% and an mDice score of 86.1%, evaluated on the two classes background and person
Create account to get full access
Overview
- This research paper focuses on using 4D radar data to detect humans in low-visibility field conditions.
- The authors propose a convolutional neural network-based approach for semantic segmentation to identify humans in the radar data.
- The method is evaluated on a dataset collected in real-world scenarios, including challenging conditions like darkness and fog.
Plain English Explanation
Radar systems can be used to detect and track objects, even in poor visibility conditions like darkness or fog. In this research, the authors explore using a type of radar called "4D radar" to specifically identify humans in these challenging environments.
Traditional radar systems provide information about the distance, speed, and direction of objects. 4D radar adds an extra dimension by also measuring the height of detected objects. This additional information can help distinguish between different types of objects, like humans versus vehicles.
The researchers developed a deep learning algorithm, specifically a convolutional neural network, to analyze the 4D radar data and automatically identify the presence of humans. This "semantic segmentation" approach allows the system to precisely locate and outline individual people within the radar scans.
The method was tested on a dataset collected in real-world scenarios, including dark conditions and foggy weather. By accurately detecting humans in these low-visibility situations, the 4D radar system could have important applications, such as enhancing safety for self-driving cars or enabling surveillance in hazardous environments.
Technical Explanation
The authors propose a convolutional neural network (CNN) -based semantic segmentation approach to detect humans from 4D radar data in low-visibility conditions. 4D radar provides information about the distance, velocity, azimuth, and elevation of detected objects, offering additional context compared to traditional 3D radar.
The CNN architecture takes the 4D radar data as input and outputs a semantic segmentation map, where each pixel is classified as either "human" or "non-human." This allows the system to precisely locate and outline individual people within the radar scans.
The model was trained and evaluated on a dataset collected in real-world scenarios, including darkness and fog. The dataset includes ground truth annotations of human locations, enabling supervised learning of the semantic segmentation task.
Experiments demonstrated the effectiveness of the proposed approach, which outperformed baseline methods in detecting humans in the challenging low-visibility conditions. The authors analyze the results and discuss potential applications, such as enhancing safety for autonomous vehicles and enabling surveillance in hazardous environments.
Critical Analysis
The paper presents a well-designed study that makes meaningful contributions to the field of human detection from 4D radar data. The authors have carefully curated a realistic dataset and developed a robust deep learning-based solution to address the challenge of human identification in low-visibility conditions.
One potential limitation of the research is the relatively small size of the dataset, which may constrain the model's generalization capabilities. The authors acknowledge this and suggest that expanding the dataset with more diverse real-world scenarios could further improve the system's performance.
Additionally, the paper does not provide a detailed analysis of the model's failure cases or potential biases. Understanding the specific situations where the method struggles could inform future improvements and help identify edge cases that require further investigation.
Despite these minor caveats, the research represents a significant step forward in leveraging the capabilities of 4D radar for human detection, with promising applications in autonomous vehicles, security, and surveillance domains. The authors' approach and findings could inspire further advancements in this important area of research.
Conclusion
This research paper presents a novel approach for detecting humans from 4D radar data in low-visibility field conditions. By leveraging the rich spatial and temporal information provided by 4D radar, the authors developed a deep learning-based semantic segmentation model that can accurately identify the presence and location of people, even in challenging scenarios like darkness and fog.
The demonstrated effectiveness of this method has significant implications for enhancing safety in autonomous vehicles, enabling more robust surveillance and monitoring systems, and facilitating human-robot interaction in hazardous environments. As the field of 4D radar perception continues to evolve, this research represents an important step forward in unlocking the full potential of this powerful sensing technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔮
RadarOcc: Robust 3D Occupancy Prediction with 4D Imaging Radar
Fangqiang Ding, Xiangyu Wen, Lawrence Zhu, Yiming Li, Chris Xiaoxuan Lu
0
0
3D occupancy-based perception pipeline has significantly advanced autonomous driving by capturing detailed scene descriptions and demonstrating strong generalizability across various object categories and shapes. Current methods predominantly rely on LiDAR or camera inputs for 3D occupancy prediction. These methods are susceptible to adverse weather conditions, limiting the all-weather deployment of self-driving cars. To improve perception robustness, we leverage the recent advances in automotive radars and introduce a novel approach that utilizes 4D imaging radar sensors for 3D occupancy prediction. Our method, RadarOcc, circumvents the limitations of sparse radar point clouds by directly processing the 4D radar tensor, thus preserving essential scene details. RadarOcc innovatively addresses the challenges associated with the voluminous and noisy 4D radar data by employing Doppler bins descriptors, sidelobe-aware spatial sparsification, and range-wise self-attention mechanisms. To minimize the interpolation errors associated with direct coordinate transformations, we also devise a spherical-based feature encoding followed by spherical-to-Cartesian feature aggregation. We benchmark various baseline methods based on distinct modalities on the public K-Radar dataset. The results demonstrate RadarOcc's state-of-the-art performance in radar-based 3D occupancy prediction and promising results even when compared with LiDAR- or camera-based methods. Additionally, we present qualitative evidence of the superior performance of 4D radar in adverse weather conditions and explore the impact of key pipeline components through ablation studies.
6/14/2024
A Survey of Deep Learning Based Radar and Vision Fusion for 3D Object Detection in Autonomous Driving
Di Wu, Feng Yang, Benlian Xu, Pan Liao, Bo Liu
0
0
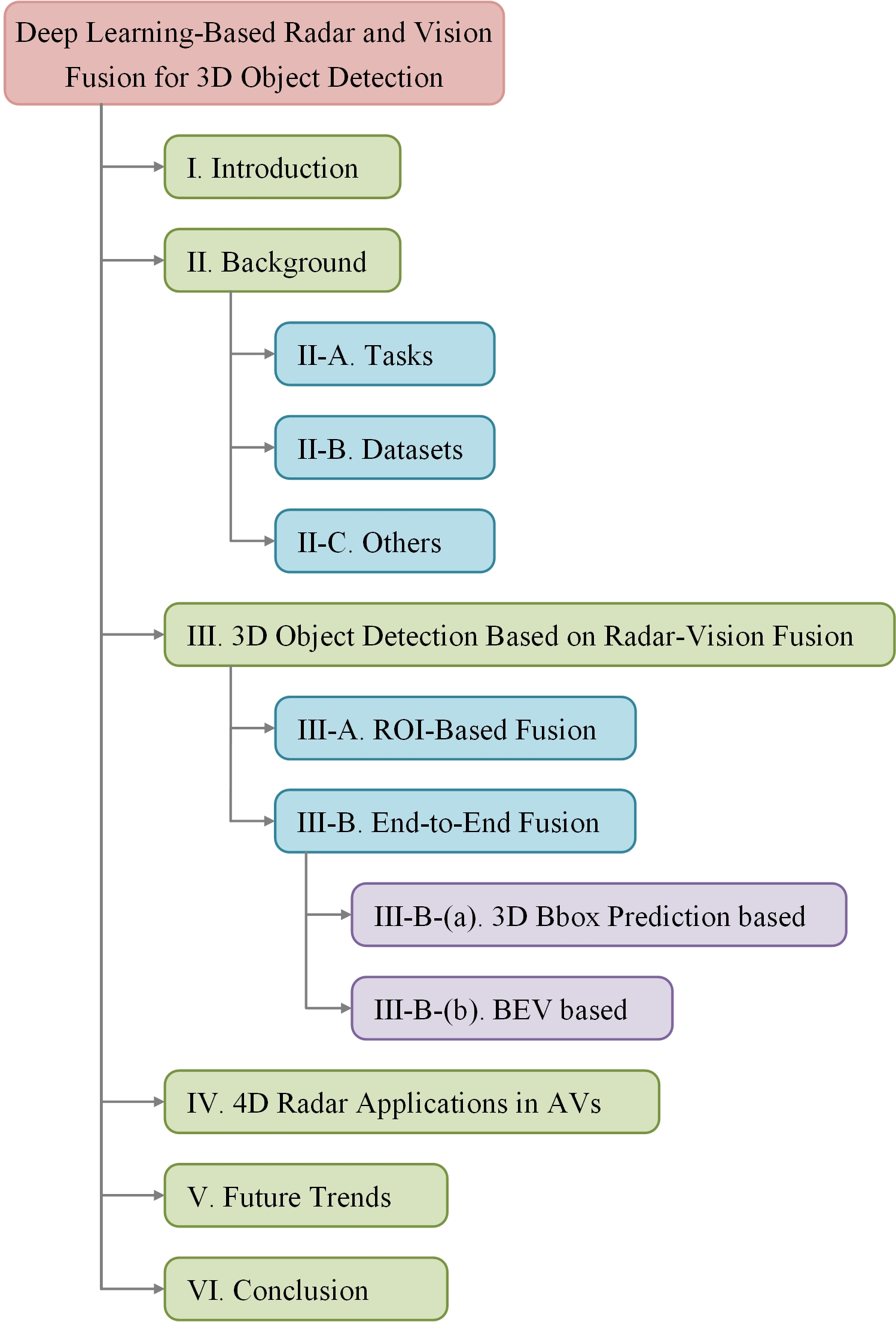
With the rapid advancement of autonomous driving technology, there is a growing need for enhanced safety and efficiency in the automatic environmental perception of vehicles during their operation. In modern vehicle setups, cameras and mmWave radar (radar), being the most extensively employed sensors, demonstrate complementary characteristics, inherently rendering them conducive to fusion and facilitating the achievement of both robust performance and cost-effectiveness. This paper focuses on a comprehensive survey of radar-vision (RV) fusion based on deep learning methods for 3D object detection in autonomous driving. We offer a comprehensive overview of each RV fusion category, specifically those employing region of interest (ROI) fusion and end-to-end fusion strategies. As the most promising fusion strategy at present, we provide a deeper classification of end-to-end fusion methods, including those 3D bounding box prediction based and BEV based approaches. Moreover, aligning with recent advancements, we delineate the latest information on 4D radar and its cutting-edge applications in autonomous vehicles (AVs). Finally, we present the possible future trends of RV fusion and summarize this paper.
6/4/2024
🔎
Multi-Object Tracking based on Imaging Radar 3D Object Detection
Patrick Palmer, Martin Kruger, Richard Altendorfer, Torsten Bertram
0
0
Effective tracking of surrounding traffic participants allows for an accurate state estimation as a necessary ingredient for prediction of future behavior and therefore adequate planning of the ego vehicle trajectory. One approach for detecting and tracking surrounding traffic participants is the combination of a learning based object detector with a classical tracking algorithm. Learning based object detectors have been shown to work adequately on lidar and camera data, while learning based object detectors using standard radar data input have proven to be inferior. Recently, with the improvements to radar sensor technology in the form of imaging radars, the object detection performance on radar was greatly improved but is still limited compared to lidar sensors due to the sparsity of the radar point cloud. This presents a unique challenge for the task of multi-object tracking. The tracking algorithm must overcome the limited detection quality while generating consistent tracks. To this end, a comparison between different multi-object tracking methods on imaging radar data is required to investigate its potential for downstream tasks. The work at hand compares multiple approaches and analyzes their limitations when applied to imaging radar data. Furthermore, enhancements to the presented approaches in the form of probabilistic association algorithms are considered for this task.
6/4/2024
EFEAR-4D: Ego-Velocity Filtering for Efficient and Accurate 4D radar Odometry
Xiaoyi Wu, Yushuai Chen, Zhan Li, Ziyang Hong, Liang Hu
0
0
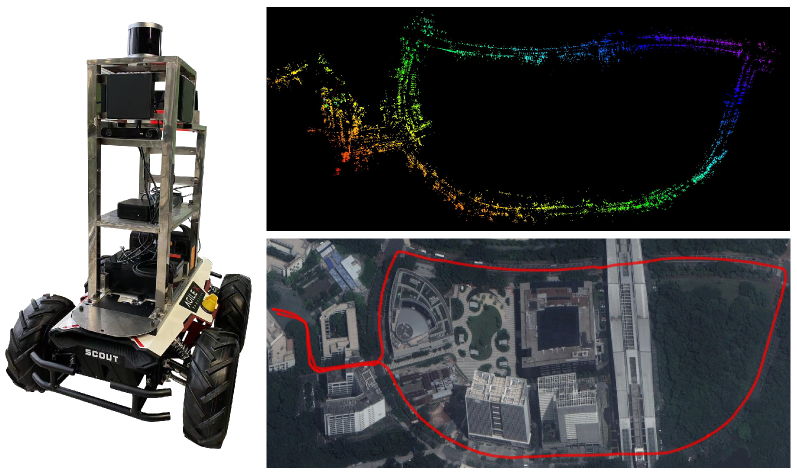
Odometry is a crucial component for successfully implementing autonomous navigation, relying on sensors such as cameras, LiDARs and IMUs. However, these sensors may encounter challenges in extreme weather conditions, such as snowfall and fog. The emergence of FMCW radar technology offers the potential for robust perception in adverse conditions. As the latest generation of FWCW radars, the 4D mmWave radar provides point cloud with range, azimuth, elevation, and Doppler velocity information, despite inherent sparsity and noises in the point cloud. In this paper, we propose EFEAR-4D, an accurate, highly efficient, and learning-free method for large-scale 4D radar odometry estimation. EFEAR-4D exploits Doppler velocity information delicately for robust ego-velocity estimation, resulting in a highly accurate prior guess. EFEAR-4D maintains robustness against point-cloud sparsity and noises across diverse environments through dynamic object removal and effective region-wise feature extraction. Extensive experiments on two publicly available 4D radar datasets demonstrate state-of-the-art reliability and localization accuracy of EFEAR-4D under various conditions. Furthermore, we have collected a dataset following the same route but varying installation heights of the 4D radar, emphasizing the significant impact of radar height on point cloud quality - a crucial consideration for real-world deployments. Our algorithm and dataset will be available soon at https://github.com/CLASS-Lab/EFEAR-4D.
5/17/2024