Exploring Radar Data Representations in Autonomous Driving: A Comprehensive Review
2312.04861
0
0
Abstract
With the rapid advancements of sensor technology and deep learning, autonomous driving systems are providing safe and efficient access to intelligent vehicles as well as intelligent transportation. Among these equipped sensors, the radar sensor plays a crucial role in providing robust perception information in diverse environmental conditions. This review focuses on exploring different radar data representations utilized in autonomous driving systems. Firstly, we introduce the capabilities and limitations of the radar sensor by examining the working principles of radar perception and signal processing of radar measurements. Then, we delve into the generation process of five radar representations, including the ADC signal, radar tensor, point cloud, grid map, and micro-Doppler signature. For each radar representation, we examine the related datasets, methods, advantages and limitations. Furthermore, we discuss the challenges faced in these data representations and propose potential research directions. Above all, this comprehensive review offers an in-depth insight into how these representations enhance autonomous system capabilities, providing guidance for radar perception researchers. To facilitate retrieval and comparison of different data representations, datasets and methods, we provide an interactive website at https://radar-camera-fusion.github.io/radar.
Create account to get full access
Overview
- Explores different data representations for radar perception in autonomous driving
- Investigates how various radar data formats impact the performance of machine learning models
- Focuses on enhancing radar-based object detection and classification for intelligent vehicles
Plain English Explanation
Autonomous vehicles rely on a variety of sensors, including radar, to perceive their surroundings and make safe driving decisions. This paper examines how the way radar data is represented can affect the performance of the machine learning models used to interpret that data.
The researchers tested different formats for representing radar information, such as Bootstrapping Autonomous Driving Radars via Self-Supervised Learning or Radar Ghost Dataset for Evaluation of Ghost Objects in Automotive Radar. They then measured how well machine learning models could detect and classify objects in the environment using each data representation.
The goal was to understand which data formats work best for tasks like Enhanced Radar Perception via Multi-Task Learning or Human Detection from 4D Radar Data in Low Signal-to-Noise Ratio Scenarios. This can help improve the reliability and accuracy of radar-based perception systems in self-driving cars.
Technical Explanation
The paper explores different data representations for radar perception in autonomous driving. It investigates how various radar data formats, such as Advancements in Radar Odometry, impact the performance of machine learning models used for object detection and classification.
The researchers evaluated several approaches to encoding radar data, including Cartesian, polar, and range-Doppler representations. They trained neural network models on these different data formats and measured their effectiveness at detecting and classifying objects in the environment.
The experiments showed that the choice of data representation can significantly affect model performance. Certain formats were better suited for specific perception tasks, such as detecting pedestrians or tracking moving vehicles. The paper provides insights into the tradeoffs between data representation, model complexity, and end-task accuracy.
Critical Analysis
The paper provides a valuable exploration of how radar data representation can influence the performance of autonomous driving perception systems. By testing various data formats, the researchers offer practical insights that could inform the design of more robust and reliable radar-based machine learning models.
However, the paper does not delve into the computational or memory requirements of the different representations. The tradeoffs between model complexity, inference speed, and accuracy are only briefly mentioned. Further analysis in this area could help developers make more informed decisions when deploying radar perception systems in real-world autonomous vehicles.
Additionally, the paper focuses on a limited set of perception tasks, such as object detection and classification. Exploring the impact of data representations on other radar-based capabilities, like Advancements in Radar Odometry or Human Detection from 4D Radar Data in Low Signal-to-Noise Ratio Scenarios, could yield additional insights.
Conclusion
This paper provides a comprehensive analysis of how different data representations for radar perception can affect the performance of autonomous driving systems. By testing various encoding formats, the researchers offer valuable insights that can help developers design more accurate and reliable radar-based perception models.
The findings suggest that the choice of data representation is a crucial design decision that can significantly impact the overall performance of self-driving car technologies. By understanding the tradeoffs between data formats, machine learning model complexity, and task-specific accuracy, the automotive industry can further advance the state-of-the-art in radar-enabled autonomous driving.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
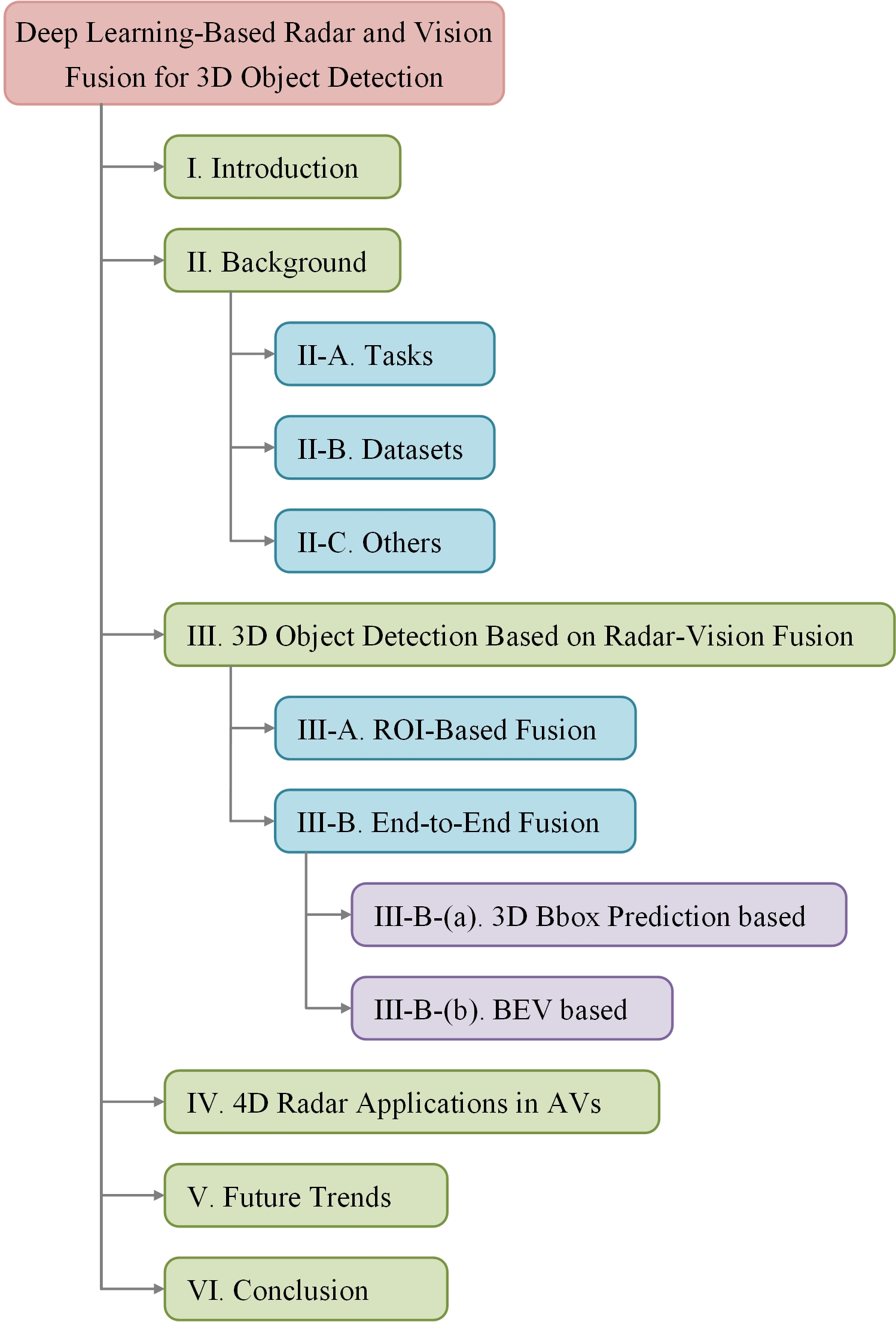
A Survey of Deep Learning Based Radar and Vision Fusion for 3D Object Detection in Autonomous Driving
Di Wu, Feng Yang, Benlian Xu, Pan Liao, Bo Liu
0
0
With the rapid advancement of autonomous driving technology, there is a growing need for enhanced safety and efficiency in the automatic environmental perception of vehicles during their operation. In modern vehicle setups, cameras and mmWave radar (radar), being the most extensively employed sensors, demonstrate complementary characteristics, inherently rendering them conducive to fusion and facilitating the achievement of both robust performance and cost-effectiveness. This paper focuses on a comprehensive survey of radar-vision (RV) fusion based on deep learning methods for 3D object detection in autonomous driving. We offer a comprehensive overview of each RV fusion category, specifically those employing region of interest (ROI) fusion and end-to-end fusion strategies. As the most promising fusion strategy at present, we provide a deeper classification of end-to-end fusion methods, including those 3D bounding box prediction based and BEV based approaches. Moreover, aligning with recent advancements, we delineate the latest information on 4D radar and its cutting-edge applications in autonomous vehicles (AVs). Finally, we present the possible future trends of RV fusion and summarize this paper.
6/4/2024
Bootstrapping Autonomous Driving Radars with Self-Supervised Learning
Yiduo Hao, Sohrab Madani, Junfeng Guan, Mohammed Alloulah, Saurabh Gupta, Haitham Hassanieh
0
0
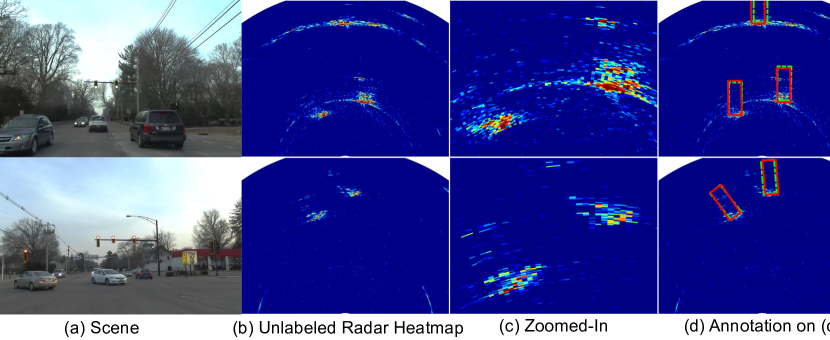
The perception of autonomous vehicles using radars has attracted increased research interest due its ability to operate in fog and bad weather. However, training radar models is hindered by the cost and difficulty of annotating large-scale radar data. To overcome this bottleneck, we propose a self-supervised learning framework to leverage the large amount of unlabeled radar data to pre-train radar-only embeddings for self-driving perception tasks. The proposed method combines radar-to-radar and radar-to-vision contrastive losses to learn a general representation from unlabeled radar heatmaps paired with their corresponding camera images. When used for downstream object detection, we demonstrate that the proposed self-supervision framework can improve the accuracy of state-of-the-art supervised baselines by $5.8%$ in mAP. Code is available at url{https://github.com/yiduohao/Radical}.
4/19/2024
📉
4D Millimeter-Wave Radar in Autonomous Driving: A Survey
Zeyu Han, Jiahao Wang, Zikun Xu, Shuocheng Yang, Lei He, Shaobing Xu, Jianqiang Wang, Keqiang Li
0
0
The 4D millimeter-wave (mmWave) radar, proficient in measuring the range, azimuth, elevation, and velocity of targets, has attracted considerable interest within the autonomous driving community. This is attributed to its robustness in extreme environments and the velocity and elevation measurement capabilities. However, despite the rapid advancement in research related to its sensing theory and application, there is a conspicuous absence of comprehensive surveys on the subject of 4D mmWave radar. In an effort to bridge this gap and stimulate future research, this paper presents an exhaustive survey on the utilization of 4D mmWave radar in autonomous driving. Initially, the paper provides reviews on the theoretical background and progress of 4D mmWave radars, encompassing aspects such as the signal processing workflow, resolution improvement approaches, and extrinsic calibration process. Learning-based radar data quality improvement methods are present following. Then, this paper introduces relevant datasets and application algorithms in autonomous driving perception, localization and mapping tasks. Finally, this paper concludes by forecasting future trends in the realm of 4D mmWave radar in autonomous driving. To the best of our knowledge, this is the first survey specifically dedicated to the 4D mmWave radar in autonomous driving.
4/29/2024

Redefining Automotive Radar Imaging: A Domain-Informed 1D Deep Learning Approach for High-Resolution and Efficient Performance
Ruxin Zheng, Shunqiao Sun, Holger Caesar, Honglei Chen, Jian Li
0
0
Millimeter-wave (mmWave) radars are indispensable for perception tasks of autonomous vehicles, thanks to their resilience in challenging weather conditions. Yet, their deployment is often limited by insufficient spatial resolution for precise semantic scene interpretation. Classical super-resolution techniques adapted from optical imaging inadequately address the distinct characteristics of radar signal data. In response, our study redefines radar imaging super-resolution as a one-dimensional (1D) signal super-resolution spectra estimation problem by harnessing the radar signal processing domain knowledge, introducing innovative data normalization and a domain-informed signal-to-noise ratio (SNR)-guided loss function. Our tailored deep learning network for automotive radar imaging exhibits remarkable scalability, parameter efficiency and fast inference speed, alongside enhanced performance in terms of radar imaging quality and resolution. Extensive testing confirms that our SR-SPECNet sets a new benchmark in producing high-resolution radar range-azimuth images, outperforming existing methods across varied antenna configurations and dataset sizes. Source code and new radar dataset will be made publicly available online.
6/12/2024