Accurate Cooperative Localization Utilizing LiDAR-equipped Roadside Infrastructure for Autonomous Driving

0
Sign in to get full access
Overview
- This paper presents a cooperative localization system that leverages LiDAR-equipped roadside infrastructure to improve the accuracy of autonomous vehicle positioning.
- The system allows connected autonomous vehicles to receive and fuse LiDAR data from roadside sensors, enhancing their ability to localize themselves within the environment.
- The approach aims to address the limitations of onboard sensors alone, which can struggle with accuracy and reliability, especially in complex urban settings.
Plain English Explanation
Self-driving cars need to know exactly where they are on the road in order to drive safely and efficiently. This is done through a process called localization, where the car uses sensors like cameras and GPS to figure out its precise position.
However, the sensors on the car itself can sometimes be unreliable, especially in crowded cities with tall buildings or other obstacles. To address this, the researchers in this paper propose using a technique called cooperative localization.
The key idea is to have special sensors installed on the side of the road, which can detect the car's position using advanced LiDAR technology. The car can then receive this information from the roadside sensors and combine it with its own sensor data to get a much more accurate fix on its location.
This cooperative approach allows the car to overcome the limitations of its onboard sensors, especially in complex urban environments where traditional localization can be challenging. By leveraging the infrastructure around it, the self-driving car can navigate more precisely and safely.
Technical Explanation
The paper proposes a cooperative localization system that integrates LiDAR data from roadside infrastructure with onboard sensors to improve the accuracy of autonomous vehicle positioning. The system consists of two key components:
-
Roadside LiDAR Sensors: The researchers installed LiDAR units along the road that can continuously scan the environment and detect the positions of nearby vehicles. These roadside sensors form a network that can share data with connected autonomous vehicles.
-
Cooperative Localization Algorithm: The autonomous vehicles are equipped with onboard sensors like cameras and GPS. They can receive the LiDAR data from the roadside infrastructure and fuse it with their own sensor readings using a specialized algorithm. This allows the vehicles to determine their location with much higher precision compared to relying solely on their own sensors.
The researchers evaluated the performance of their cooperative localization system through extensive simulations and real-world experiments. They demonstrated that the approach can significantly improve localization accuracy, especially in challenging urban environments where traditional methods often struggle. The system was able to achieve sub-decimeter level positioning, which is critical for the safe operation of autonomous vehicles.
Critical Analysis
The paper makes a compelling case for the benefits of using roadside LiDAR infrastructure to enhance autonomous vehicle localization. The cooperative approach helps address some of the key limitations of onboard sensors, particularly in complex urban settings.
However, the researchers acknowledge that the deployment of the required roadside infrastructure could be a significant challenge, both in terms of cost and coordination across different stakeholders. Integrating the cooperative localization system into the broader autonomous driving ecosystem would also require careful engineering and standardization efforts.
Additionally, the paper does not fully address potential privacy and security concerns that may arise from the exchange of vehicle location data between the cars and roadside infrastructure. Ensuring the privacy and security of this data will be crucial for the widespread adoption of such cooperative localization systems.
Further research could also explore the scalability of the approach, its performance in diverse road and weather conditions, and the potential impact on traffic flow and coordination among connected autonomous vehicles.
Conclusion
The paper presents a promising approach for improving the localization accuracy of autonomous vehicles by leveraging LiDAR-equipped roadside infrastructure. By enabling cooperative localization, the system can overcome the limitations of onboard sensors and provide more reliable positioning, especially in challenging urban environments.
While the deployment of the required infrastructure may pose some challenges, the potential benefits of this cooperative localization technology are significant. Improved vehicle positioning can contribute to the safe and efficient operation of autonomous driving, ultimately leading to better transportation systems and enhanced mobility for the public.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Accurate Cooperative Localization Utilizing LiDAR-equipped Roadside Infrastructure for Autonomous Driving
Yuze Jiang, Ehsan Javanmardi, Manabu Tsukada, Hiroshi Esaki
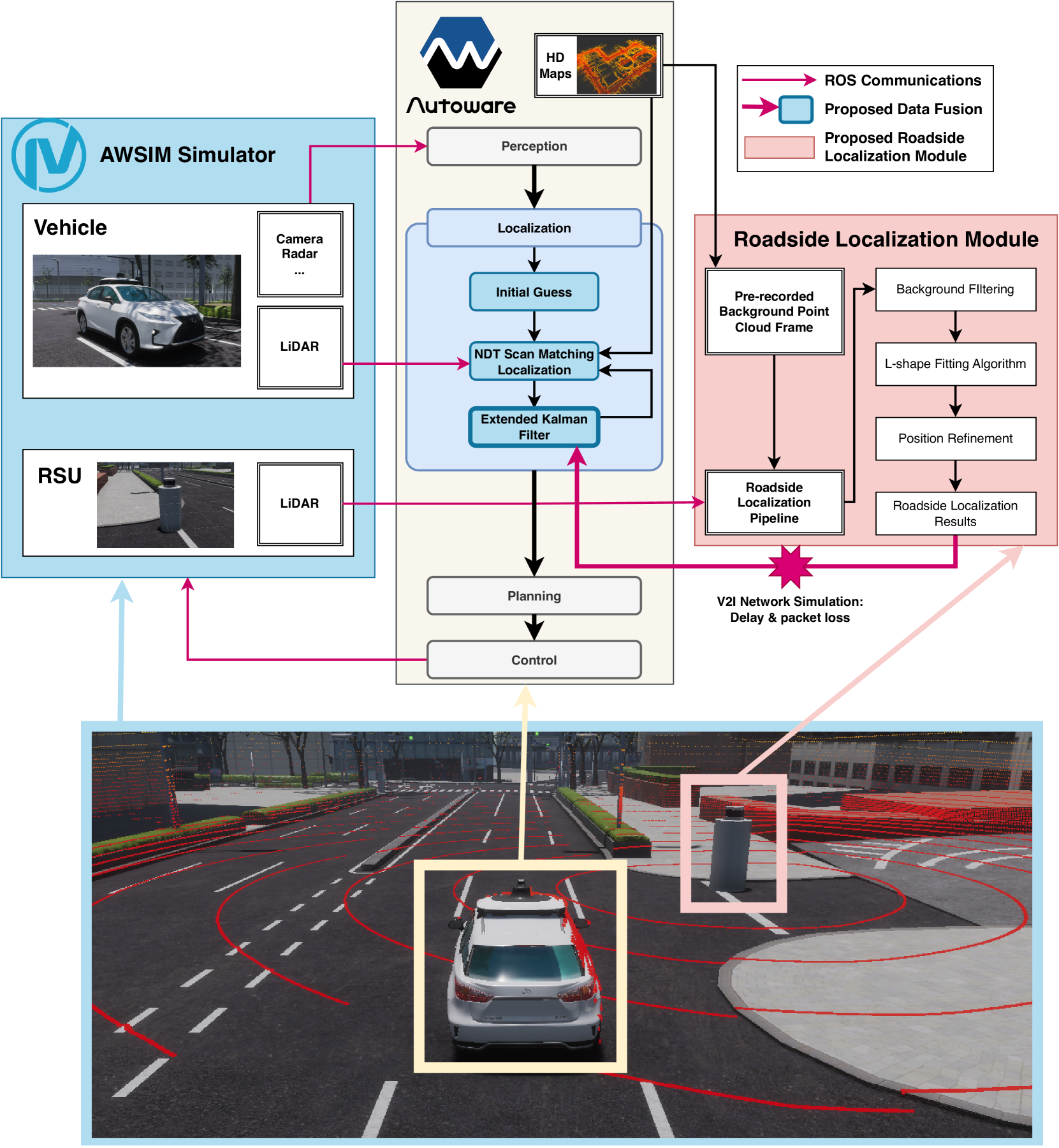
Recent advancements in LiDAR technology have significantly lowered costs and improved both its precision and resolution, thereby solidifying its role as a critical component in autonomous vehicle localization. Using sophisticated 3D registration algorithms, LiDAR now facilitates vehicle localization with centimeter-level accuracy. However, these high-precision techniques often face reliability challenges in environments devoid of identifiable map features. To address this limitation, we propose a novel approach that utilizes road side units (RSU) with vehicle-to-infrastructure (V2I) communications to assist vehicle self-localization. By using RSUs as stationary reference points and processing real-time LiDAR data, our method enhances localization accuracy through a cooperative localization framework. By placing RSUs in critical areas, our proposed method can improve the reliability and precision of vehicle localization when the traditional vehicle self-localization technique falls short. Evaluation results in an end-to-end autonomous driving simulator AWSIM show that the proposed method can improve localization accuracy by up to 80% under vulnerable environments compared to traditional localization methods. Additionally, our method also demonstrates robust resistance to network delays and packet loss in heterogeneous network environments.
Read more7/12/2024
🔎
0
Roadside LiDAR Assisted Cooperative Localization for Connected Autonomous Vehicles
Yuze Jiang, Ehsan Javanmardi, Jin Nakazato, Manabu Tsukada, Hiroshi Esaki
Advancements in LiDAR technology have led to more cost-effective production while simultaneously improving precision and resolution. As a result, LiDAR has become integral to vehicle localization, achieving centimeter-level accuracy through techniques like Normal Distributions Transform (NDT) and other advanced 3D registration algorithms. Nonetheless, these approaches are reliant on high-definition 3D point cloud maps, the creation of which involves significant expenditure. When such maps are unavailable or lack sufficient features for 3D registration algorithms, localization accuracy diminishes, posing a risk to road safety. To address this, we proposed to use LiDAR-equipped roadside unit and Vehicle-to-Infrastructure (V2I) communication to accurately estimate the connected autonomous vehicle's position and help the vehicle when its self-localization is not accurate enough. Our simulation results indicate that this method outperforms traditional NDT scan matching-based approaches in terms of localization accuracy.
Read more7/12/2024

0
Cooperative Visual-LiDAR Extrinsic Calibration Technology for Intersection Vehicle-Infrastructure: A review
Xinyu Zhang, Yijin Xiong, Qianxin Qu, Renjie Wang, Xin Gao, Jing Liu, Shichun Guo, Jun Li
In the typical urban intersection scenario, both vehicles and infrastructures are equipped with visual and LiDAR sensors. By successfully integrating the data from vehicle-side and road monitoring devices, a more comprehensive and accurate environmental perception and information acquisition can be achieved. The Calibration of sensors, as an essential component of autonomous driving technology, has consistently drawn significant attention. Particularly in scenarios involving multiple sensors collaboratively perceiving and addressing localization challenges, the requirement for inter-sensor calibration becomes crucial. Recent years have witnessed the emergence of the concept of multi-end cooperation, where infrastructure captures and transmits surrounding environment information to vehicles, bolstering their perception capabilities while mitigating costs. However, this also poses technical complexities, underscoring the pressing need for diverse end calibration. Camera and LiDAR, the bedrock sensors in autonomous driving, exhibit expansive applicability. This paper comprehensively examines and analyzes the calibration of multi-end camera-LiDAR setups from vehicle, roadside, and vehicle-road cooperation perspectives, outlining their relevant applications and profound significance. Concluding with a summary, we present our future-oriented ideas and hypotheses.
Read more5/17/2024

0
Label-Efficient 3D Object Detection For Road-Side Units
Minh-Quan Dao, Holger Caesar, Julie Stephany Berrio, Mao Shan, Stewart Worrall, Vincent Fr'emont, Ezio Malis
Occlusion presents a significant challenge for safety-critical applications such as autonomous driving. Collaborative perception has recently attracted a large research interest thanks to the ability to enhance the perception of autonomous vehicles via deep information fusion with intelligent roadside units (RSU), thus minimizing the impact of occlusion. While significant advancement has been made, the data-hungry nature of these methods creates a major hurdle for their real-world deployment, particularly due to the need for annotated RSU data. Manually annotating the vast amount of RSU data required for training is prohibitively expensive, given the sheer number of intersections and the effort involved in annotating point clouds. We address this challenge by devising a label-efficient object detection method for RSU based on unsupervised object discovery. Our paper introduces two new modules: one for object discovery based on a spatial-temporal aggregation of point clouds, and another for refinement. Furthermore, we demonstrate that fine-tuning on a small portion of annotated data allows our object discovery models to narrow the performance gap with, or even surpass, fully supervised models. Extensive experiments are carried out in simulated and real-world datasets to evaluate our method.
Read more4/10/2024