Roadside LiDAR Assisted Cooperative Localization for Connected Autonomous Vehicles

0
🔎
Sign in to get full access
Overview
- Advancements in LiDAR technology have led to more cost-effective production and improved precision and resolution.
- LiDAR is integral to vehicle localization, achieving centimeter-level accuracy through techniques like Normal Distributions Transform (NDT) and other advanced 3D registration algorithms.
- These approaches rely on high-definition 3D point cloud maps, which are expensive to create.
- When such maps are unavailable or lack sufficient features, localization accuracy diminishes, posing a risk to road safety.
Plain English Explanation
LiDAR, which stands for Light Detection and Ranging, is a technology that uses laser light to measure distances and create detailed 3D maps. Advancements in LiDAR have made it more affordable to produce while also improving its precision and resolution. This has allowed LiDAR to become an essential tool for helping self-driving cars and other autonomous vehicles know exactly where they are located.
Techniques like Normal Distributions Transform (NDT) and other advanced 3D registration algorithms can use LiDAR data to pinpoint a vehicle's location with centimeter-level accuracy. However, these methods require having access to high-definition 3D maps of the area, which are time-consuming and costly to create.
When these detailed maps are not available, or if they lack enough distinguishing features, the vehicle's self-localization becomes less accurate. This poses a safety risk, as the vehicle may not know its precise position on the road. To address this problem, researchers proposed using LiDAR-equipped roadside units and vehicle-to-infrastructure (V2I) communication to help the autonomous vehicle determine its location more accurately when its own systems are not working well enough.
Technical Explanation
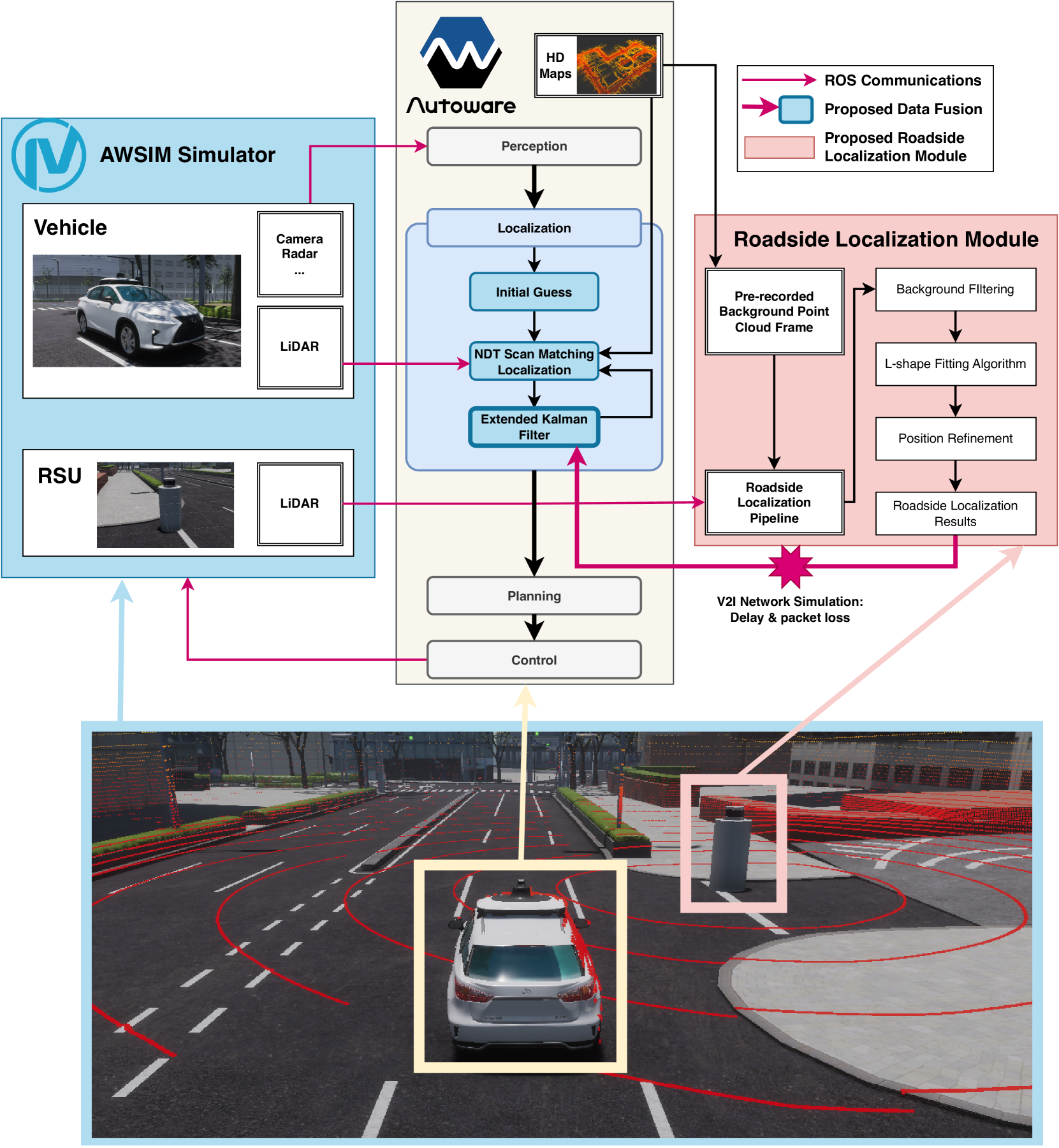
The researchers proposed a method that utilizes LiDAR-equipped roadside units and V2I communication to improve the localization accuracy of connected autonomous vehicles when traditional 3D registration algorithms like NDT are not sufficient.
The roadside LiDAR units continuously scan the environment and share this 3D point cloud data with nearby vehicles over the V2I network. The autonomous vehicle can then use this additional information, combined with its own on-board sensors, to more precisely determine its position on the road, even in areas where detailed maps are unavailable or inadequate.
Through simulation experiments, the researchers demonstrated that their proposed cooperative localization approach outperforms traditional NDT-based scan matching in terms of localization accuracy. This is particularly important in urban environments, where elevated 3D LiDAR can provide enhanced perception of the surroundings.
Critical Analysis
The research presents a promising solution to the challenge of accurate localization for autonomous vehicles when high-definition 3D maps are not available. However, the simulation-based evaluation may not fully capture the real-world complexities and constraints that would be encountered in deploying such a cooperative localization system.
Additionally, the reliance on V2I communication introduces potential vulnerabilities, such as network latency, reliability, and security concerns that would need to be carefully addressed. The integration of roadside LiDAR units and their maintenance would also require significant infrastructure investment and coordination between vehicle manufacturers and transportation authorities.
Further research is needed to extend this approach to suburban environments and to explore the feasibility of applying extended object tracking techniques for self-localization in the absence of detailed maps.
Conclusion
This research proposes an innovative solution to the challenge of accurate localization for autonomous vehicles in areas where high-definition 3D maps are not available. By leveraging LiDAR-equipped roadside units and V2I communication, the proposed cooperative localization approach can enhance the self-localization capabilities of connected autonomous vehicles, improving road safety and paving the way for more widespread adoption of autonomous driving technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔎
0
Roadside LiDAR Assisted Cooperative Localization for Connected Autonomous Vehicles
Yuze Jiang, Ehsan Javanmardi, Jin Nakazato, Manabu Tsukada, Hiroshi Esaki
Advancements in LiDAR technology have led to more cost-effective production while simultaneously improving precision and resolution. As a result, LiDAR has become integral to vehicle localization, achieving centimeter-level accuracy through techniques like Normal Distributions Transform (NDT) and other advanced 3D registration algorithms. Nonetheless, these approaches are reliant on high-definition 3D point cloud maps, the creation of which involves significant expenditure. When such maps are unavailable or lack sufficient features for 3D registration algorithms, localization accuracy diminishes, posing a risk to road safety. To address this, we proposed to use LiDAR-equipped roadside unit and Vehicle-to-Infrastructure (V2I) communication to accurately estimate the connected autonomous vehicle's position and help the vehicle when its self-localization is not accurate enough. Our simulation results indicate that this method outperforms traditional NDT scan matching-based approaches in terms of localization accuracy.
Read more7/12/2024
0
Accurate Cooperative Localization Utilizing LiDAR-equipped Roadside Infrastructure for Autonomous Driving
Yuze Jiang, Ehsan Javanmardi, Manabu Tsukada, Hiroshi Esaki
Recent advancements in LiDAR technology have significantly lowered costs and improved both its precision and resolution, thereby solidifying its role as a critical component in autonomous vehicle localization. Using sophisticated 3D registration algorithms, LiDAR now facilitates vehicle localization with centimeter-level accuracy. However, these high-precision techniques often face reliability challenges in environments devoid of identifiable map features. To address this limitation, we propose a novel approach that utilizes road side units (RSU) with vehicle-to-infrastructure (V2I) communications to assist vehicle self-localization. By using RSUs as stationary reference points and processing real-time LiDAR data, our method enhances localization accuracy through a cooperative localization framework. By placing RSUs in critical areas, our proposed method can improve the reliability and precision of vehicle localization when the traditional vehicle self-localization technique falls short. Evaluation results in an end-to-end autonomous driving simulator AWSIM show that the proposed method can improve localization accuracy by up to 80% under vulnerable environments compared to traditional localization methods. Additionally, our method also demonstrates robust resistance to network delays and packet loss in heterogeneous network environments.
Read more7/12/2024

0
Fusion of Visual-Inertial Odometry with LiDAR Relative Localization for Cooperative Guidance of a Micro-Scale Aerial Vehicle
V'aclav Pritzl, Matouv{s} Vrba, Petr v{S}tv{e}p'an, Martin Saska
A novel relative localization approach for guidance of a micro-scale UAV by a well-equipped aerial robot fusing VIO with LiDAR is proposed in this paper. LiDAR-based localization is accurate and robust to challenging environmental conditions, but 3D LiDARs are relatively heavy and require large UAV platforms, in contrast to lightweight cameras. However, visual-based self-localization methods exhibit lower accuracy and can suffer from significant drift with respect to the global reference frame. To benefit from both sensory modalities, we focus on cooperative navigation in a heterogeneous team of a primary LiDAR-equipped UAV and a secondary micro-scale camera-equipped UAV. We propose a novel cooperative approach combining LiDAR relative localization data with VIO output on board the primary UAV to obtain an accurate pose of the secondary UAV. The pose estimate is used to precisely and reliably guide the secondary UAV along trajectories defined in the primary UAV reference frame. The experimental evaluation has shown the superior accuracy of our method to the raw VIO output and demonstrated its capability to guide the secondary UAV along desired trajectories while mitigating VIO drift. Thus, such a heterogeneous system can explore large areas with LiDAR precision, as well as visit locations inaccessible to the large LiDAR-carrying UAV platforms, as was showcased in a real-world cooperative mapping scenario.
Read more8/27/2024

0
Cooperative Visual-LiDAR Extrinsic Calibration Technology for Intersection Vehicle-Infrastructure: A review
Xinyu Zhang, Yijin Xiong, Qianxin Qu, Renjie Wang, Xin Gao, Jing Liu, Shichun Guo, Jun Li
In the typical urban intersection scenario, both vehicles and infrastructures are equipped with visual and LiDAR sensors. By successfully integrating the data from vehicle-side and road monitoring devices, a more comprehensive and accurate environmental perception and information acquisition can be achieved. The Calibration of sensors, as an essential component of autonomous driving technology, has consistently drawn significant attention. Particularly in scenarios involving multiple sensors collaboratively perceiving and addressing localization challenges, the requirement for inter-sensor calibration becomes crucial. Recent years have witnessed the emergence of the concept of multi-end cooperation, where infrastructure captures and transmits surrounding environment information to vehicles, bolstering their perception capabilities while mitigating costs. However, this also poses technical complexities, underscoring the pressing need for diverse end calibration. Camera and LiDAR, the bedrock sensors in autonomous driving, exhibit expansive applicability. This paper comprehensively examines and analyzes the calibration of multi-end camera-LiDAR setups from vehicle, roadside, and vehicle-road cooperation perspectives, outlining their relevant applications and profound significance. Concluding with a summary, we present our future-oriented ideas and hypotheses.
Read more5/17/2024