ADA-Track: End-to-End Multi-Camera 3D Multi-Object Tracking with Alternating Detection and Association

0

Sign in to get full access
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
ADA-Track: End-to-End Multi-Camera 3D Multi-Object Tracking with Alternating Detection and Association
Shuxiao Ding, Lukas Schneider, Marius Cordts, Juergen Gall
Many query-based approaches for 3D Multi-Object Tracking (MOT) adopt the tracking-by-attention paradigm, utilizing track queries for identity-consistent detection and object queries for identity-agnostic track spawning. Tracking-by-attention, however, entangles detection and tracking queries in one embedding for both the detection and tracking task, which is sub-optimal. Other approaches resemble the tracking-by-detection paradigm, detecting objects using decoupled track and detection queries followed by a subsequent association. These methods, however, do not leverage synergies between the detection and association task. Combining the strengths of both paradigms, we introduce ADA-Track, a novel end-to-end framework for 3D MOT from multi-view cameras. We introduce a learnable data association module based on edge-augmented cross-attention, leveraging appearance and geometric features. Furthermore, we integrate this association module into the decoder layer of a DETR-based 3D detector, enabling simultaneous DETR-like query-to-image cross-attention for detection and query-to-query cross-attention for data association. By stacking these decoder layers, queries are refined for the detection and association task alternately, effectively harnessing the task dependencies. We evaluate our method on the nuScenes dataset and demonstrate the advantage of our approach compared to the two previous paradigms. Code is available at https://github.com/dsx0511/ADA-Track.
Read more5/16/2024
0
Associate Everything Detected: Facilitating Tracking-by-Detection to the Unknown
Zimeng Fang, Chao Liang, Xue Zhou, Shuyuan Zhu, Xi Li
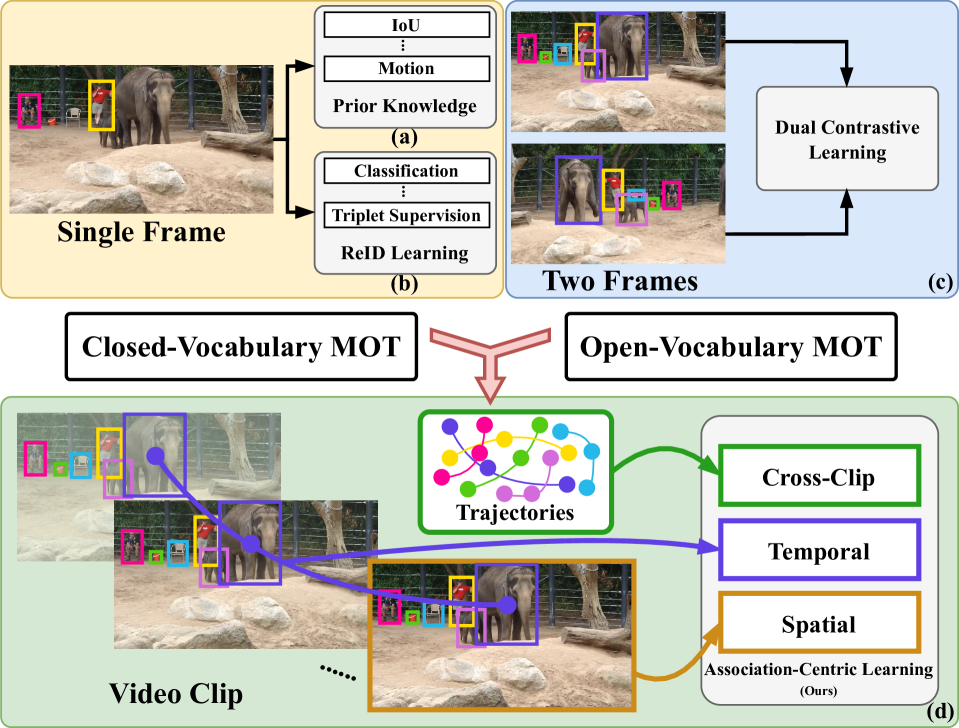
Multi-object tracking (MOT) emerges as a pivotal and highly promising branch in the field of computer vision. Classical closed-vocabulary MOT (CV-MOT) methods aim to track objects of predefined categories. Recently, some open-vocabulary MOT (OV-MOT) methods have successfully addressed the problem of tracking unknown categories. However, we found that the CV-MOT and OV-MOT methods each struggle to excel in the tasks of the other. In this paper, we present a unified framework, Associate Everything Detected (AED), that simultaneously tackles CV-MOT and OV-MOT by integrating with any off-the-shelf detector and supports unknown categories. Different from existing tracking-by-detection MOT methods, AED gets rid of prior knowledge (e.g. motion cues) and relies solely on highly robust feature learning to handle complex trajectories in OV-MOT tasks while keeping excellent performance in CV-MOT tasks. Specifically, we model the association task as a similarity decoding problem and propose a sim-decoder with an association-centric learning mechanism. The sim-decoder calculates similarities in three aspects: spatial, temporal, and cross-clip. Subsequently, association-centric learning leverages these threefold similarities to ensure that the extracted features are appropriate for continuous tracking and robust enough to generalize to unknown categories. Compared with existing powerful OV-MOT and CV-MOT methods, AED achieves superior performance on TAO, SportsMOT, and DanceTrack without any prior knowledge. Our code is available at https://github.com/balabooooo/AED.
Read more9/17/2024

0
UA-Track: Uncertainty-Aware End-to-End 3D Multi-Object Tracking
Lijun Zhou, Tao Tang, Pengkun Hao, Zihang He, Kalok Ho, Shuo Gu, Wenbo Hou, Zhihui Hao, Haiyang Sun, Kun Zhan, Peng Jia, Xianpeng Lang, Xiaodan Liang
3D multiple object tracking (MOT) plays a crucial role in autonomous driving perception. Recent end-to-end query-based trackers simultaneously detect and track objects, which have shown promising potential for the 3D MOT task. However, existing methods overlook the uncertainty issue, which refers to the lack of precise confidence about the state and location of tracked objects. Uncertainty arises owing to various factors during motion observation by cameras, especially occlusions and the small size of target objects, resulting in an inaccurate estimation of the object's position, label, and identity. To this end, we propose an Uncertainty-Aware 3D MOT framework, UA-Track, which tackles the uncertainty problem from multiple aspects. Specifically, we first introduce an Uncertainty-aware Probabilistic Decoder to capture the uncertainty in object prediction with probabilistic attention. Secondly, we propose an Uncertainty-guided Query Denoising strategy to further enhance the training process. We also utilize Uncertainty-reduced Query Initialization, which leverages predicted 2D object location and depth information to reduce query uncertainty. As a result, our UA-Track achieves state-of-the-art performance on the nuScenes benchmark, i.e., 66.3% AMOTA on the test split, surpassing the previous best end-to-end solution by a significant margin of 8.9% AMOTA.
Read more6/5/2024

0
An Approximate Dynamic Programming Framework for Occlusion-Robust Multi-Object Tracking
Pratyusha Musunuru, Yuchao Li, Jamison Weber, Dimitri Bertsekas
In this work, we consider data association problems involving multi-object tracking (MOT). In particular, we address the challenges arising from object occlusions. We propose a framework called approximate dynamic programming track (ADPTrack), which applies dynamic programming principles to improve an existing method called the base heuristic. Given a set of tracks and the next target frame, the base heuristic extends the tracks by matching them to the objects of this target frame directly. In contrast, ADPTrack first processes a few subsequent frames and applies the base heuristic starting from the next target frame to obtain tentative tracks. It then leverages the tentative tracks to match the objects of the target frame. This tends to reduce the occlusion-based errors and leads to an improvement over the base heuristic. When tested on the MOT17 video dataset, the proposed method demonstrates a 0.7% improvement in the association accuracy (IDF1 metric) over a state-of-the-art method that is used as the base heuristic. It also obtains improvements with respect to all the other standard metrics. Empirically, we found that the improvements are particularly pronounced in scenarios where the video data is obtained by fixed-position cameras.
Read more5/27/2024