An Approximate Dynamic Programming Framework for Occlusion-Robust Multi-Object Tracking

0

Sign in to get full access
Overview
- This paper presents an approximate dynamic programming framework for robust multi-object tracking in the presence of occlusions.
- The framework introduces a new formulation of the multi-object tracking problem that explicitly models occlusions and uncertainty in object detection and localization.
- The authors develop an efficient approximate dynamic programming algorithm to solve this formulation and demonstrate its effectiveness on several challenging multi-object tracking datasets.
Plain English Explanation
In this paper, the researchers developed a new system for tracking multiple objects, such as people or vehicles, in video footage. Tracking multiple objects can be challenging, especially when the objects become hidden or obscured (occluded) by other objects in the scene.
The researchers' approach models the uncertainty and potential occlusions that can occur during object tracking. This allows the system to better handle situations where objects are temporarily hidden from view. The researchers formulated the object tracking problem in a way that could be efficiently solved using an approximate dynamic programming algorithm.
This algorithm breaks down the overall tracking problem into smaller, more manageable sub-problems that can be solved quickly. By doing this, the system is able to track multiple objects in real-time, even when some of them become occluded.
The researchers tested their system on several standard multi-object tracking datasets and showed that it outperformed previous methods, especially in situations with a lot of occlusions. This suggests that their approach of explicitly modeling occlusions and uncertainty can lead to more robust and accurate multi-object tracking.
Technical Explanation
The paper presents an approximate dynamic programming framework for multi-object tracking that is designed to be robust to occlusions. The authors formulate the multi-object tracking problem as a Markov decision process, where the state represents the positions and identities of all objects in the scene, and the actions correspond to updating the object states over time.
To handle occlusions, the framework explicitly models the uncertainty in object detection and localization using a probabilistic state representation. This allows the system to reason about the likelihood of an object being occluded and update its tracking accordingly. The authors also develop an efficient approximate dynamic programming algorithm to solve this formulation, which breaks down the overall tracking problem into smaller sub-problems that can be solved in parallel.
The proposed framework is evaluated on several challenging multi-object tracking datasets, including ROBMOT, UncertaintyTrack, and DepthMOT. The results demonstrate that the system significantly outperforms previous methods, especially in scenarios with heavy occlusions. The authors attribute this success to the explicit modeling of occlusions and uncertainty in their formulation, as well as the efficiency of the approximate dynamic programming algorithm.
Critical Analysis
The paper presents a well-designed and thoroughly evaluated framework for robust multi-object tracking in the presence of occlusions. The authors' approach of explicitly modeling uncertainty and occlusions is a key strength, as it allows the system to better handle challenging real-world scenarios.
One potential limitation of the work is that it relies on accurate object detection and localization, which can be challenging in cluttered environments or with partial occlusions. The authors mention that their framework could be extended to incorporate more sophisticated detection and localization methods, such as those that leverage camera-LiDAR fusion, but this would require additional research and development.
Another area for further exploration could be the extension of the framework to handle dynamic occlusions, where objects move in and out of view over time. The current formulation assumes a static environment, which may not be realistic in many real-world applications.
Overall, the paper presents a compelling and innovative approach to the challenging problem of multi-object tracking in the presence of occlusions. The authors have made a valuable contribution to the field, and their work could have significant implications for applications such as autonomous vehicles, surveillance systems, and human-robot interaction.
Conclusion
This paper introduces an approximate dynamic programming framework for robust multi-object tracking that explicitly models occlusions and uncertainty in object detection and localization. The authors demonstrate that their approach outperforms previous methods, especially in scenarios with heavy occlusions.
The key innovations of this work are the probabilistic state representation that allows the system to reason about the likelihood of occlusions, and the efficient approximate dynamic programming algorithm that enables real-time tracking of multiple objects. These advances could have important applications in a wide range of fields, from autonomous vehicles to surveillance and human-robot interaction.
While the framework has some limitations, such as the reliance on accurate object detection, the authors have laid the groundwork for further research and development in this area. Overall, this paper represents a significant contribution to the field of multi-object tracking and could pave the way for more robust and reliable computer vision systems in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
An Approximate Dynamic Programming Framework for Occlusion-Robust Multi-Object Tracking
Pratyusha Musunuru, Yuchao Li, Jamison Weber, Dimitri Bertsekas
In this work, we consider data association problems involving multi-object tracking (MOT). In particular, we address the challenges arising from object occlusions. We propose a framework called approximate dynamic programming track (ADPTrack), which applies dynamic programming principles to improve an existing method called the base heuristic. Given a set of tracks and the next target frame, the base heuristic extends the tracks by matching them to the objects of this target frame directly. In contrast, ADPTrack first processes a few subsequent frames and applies the base heuristic starting from the next target frame to obtain tentative tracks. It then leverages the tentative tracks to match the objects of the target frame. This tends to reduce the occlusion-based errors and leads to an improvement over the base heuristic. When tested on the MOT17 video dataset, the proposed method demonstrates a 0.7% improvement in the association accuracy (IDF1 metric) over a state-of-the-art method that is used as the base heuristic. It also obtains improvements with respect to all the other standard metrics. Empirically, we found that the improvements are particularly pronounced in scenarios where the video data is obtained by fixed-position cameras.
Read more5/27/2024

0
ADA-Track: End-to-End Multi-Camera 3D Multi-Object Tracking with Alternating Detection and Association
Shuxiao Ding, Lukas Schneider, Marius Cordts, Juergen Gall
Many query-based approaches for 3D Multi-Object Tracking (MOT) adopt the tracking-by-attention paradigm, utilizing track queries for identity-consistent detection and object queries for identity-agnostic track spawning. Tracking-by-attention, however, entangles detection and tracking queries in one embedding for both the detection and tracking task, which is sub-optimal. Other approaches resemble the tracking-by-detection paradigm, detecting objects using decoupled track and detection queries followed by a subsequent association. These methods, however, do not leverage synergies between the detection and association task. Combining the strengths of both paradigms, we introduce ADA-Track, a novel end-to-end framework for 3D MOT from multi-view cameras. We introduce a learnable data association module based on edge-augmented cross-attention, leveraging appearance and geometric features. Furthermore, we integrate this association module into the decoder layer of a DETR-based 3D detector, enabling simultaneous DETR-like query-to-image cross-attention for detection and query-to-query cross-attention for data association. By stacking these decoder layers, queries are refined for the detection and association task alternately, effectively harnessing the task dependencies. We evaluate our method on the nuScenes dataset and demonstrate the advantage of our approach compared to the two previous paradigms. Code is available at https://github.com/dsx0511/ADA-Track.
Read more5/16/2024
0
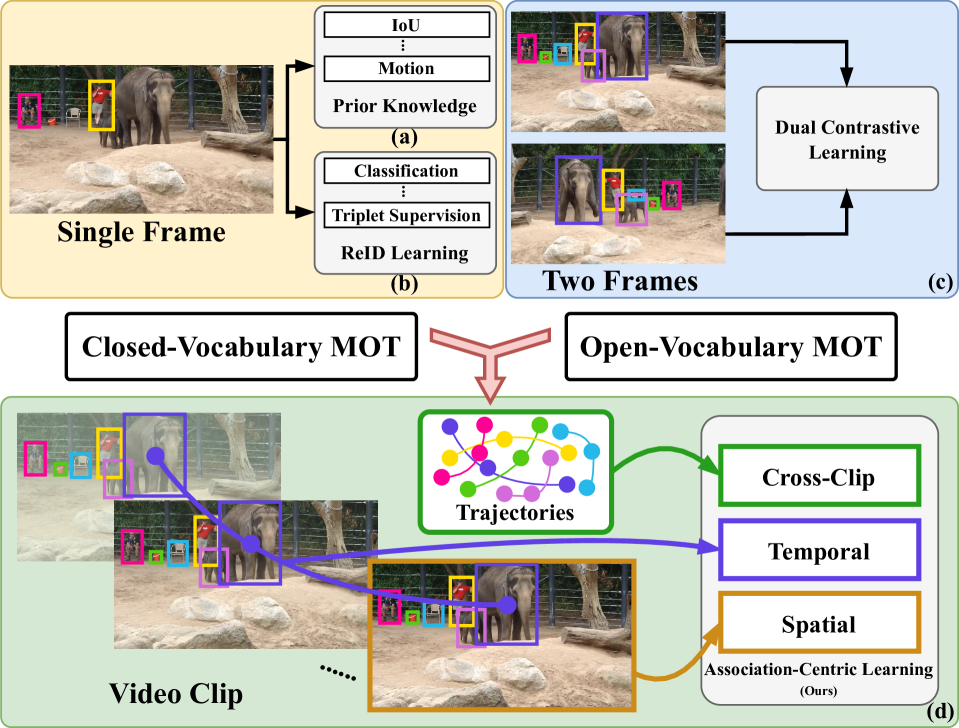
New!Associate Everything Detected: Facilitating Tracking-by-Detection to the Unknown
Zimeng Fang, Chao Liang, Xue Zhou, Shuyuan Zhu, Xi Li
Multi-object tracking (MOT) emerges as a pivotal and highly promising branch in the field of computer vision. Classical closed-vocabulary MOT (CV-MOT) methods aim to track objects of predefined categories. Recently, some open-vocabulary MOT (OV-MOT) methods have successfully addressed the problem of tracking unknown categories. However, we found that the CV-MOT and OV-MOT methods each struggle to excel in the tasks of the other. In this paper, we present a unified framework, Associate Everything Detected (AED), that simultaneously tackles CV-MOT and OV-MOT by integrating with any off-the-shelf detector and supports unknown categories. Different from existing tracking-by-detection MOT methods, AED gets rid of prior knowledge (e.g. motion cues) and relies solely on highly robust feature learning to handle complex trajectories in OV-MOT tasks while keeping excellent performance in CV-MOT tasks. Specifically, we model the association task as a similarity decoding problem and propose a sim-decoder with an association-centric learning mechanism. The sim-decoder calculates similarities in three aspects: spatial, temporal, and cross-clip. Subsequently, association-centric learning leverages these threefold similarities to ensure that the extracted features are appropriate for continuous tracking and robust enough to generalize to unknown categories. Compared with existing powerful OV-MOT and CV-MOT methods, AED achieves superior performance on TAO, SportsMOT, and DanceTrack without any prior knowledge. Our code is available at https://github.com/balabooooo/AED.
Read more9/17/2024

0
Track Initialization and Re-Identification for~3D Multi-View Multi-Object Tracking
Linh Van Ma, Tran Thien Dat Nguyen, Ba-Ngu Vo, Hyunsung Jang, Moongu Jeon
We propose a 3D multi-object tracking (MOT) solution using only 2D detections from monocular cameras, which automatically initiates/terminates tracks as well as resolves track appearance-reappearance and occlusions. Moreover, this approach does not require detector retraining when cameras are reconfigured but only the camera matrices of reconfigured cameras need to be updated. Our approach is based on a Bayesian multi-object formulation that integrates track initiation/termination, re-identification, occlusion handling, and data association into a single Bayes filtering recursion. However, the exact filter that utilizes all these functionalities is numerically intractable due to the exponentially growing number of terms in the (multi-object) filtering density, while existing approximations trade-off some of these functionalities for speed. To this end, we develop a more efficient approximation suitable for online MOT by incorporating object features and kinematics into the measurement model, which improves data association and subsequently reduces the number of terms. Specifically, we exploit the 2D detections and extracted features from multiple cameras to provide a better approximation of the multi-object filtering density to realize the track initiation/termination and re-identification functionalities. Further, incorporating a tractable geometric occlusion model based on 2D projections of 3D objects on the camera planes realizes the occlusion handling functionality of the filter. Evaluation of the proposed solution on challenging datasets demonstrates significant improvements and robustness when camera configurations change on-the-fly, compared to existing multi-view MOT solutions. The source code is publicly available at https://github.com/linh-gist/mv-glmb-ab.
Read more5/30/2024