Adaptive Robotic Tool-Tip Control Learning Considering Online Changes in Grasping State

0

Sign in to get full access
Overview
- This paper presents an adaptive robotic tool-tip control learning approach that can handle online changes in the grasping state of the tool.
- The proposed method uses a "Tool-Body Network with Parametric Bias" to enable the robot to learn and adapt to changes in the tool's grasping state during task execution.
- The approach is evaluated through simulations and real-world experiments, demonstrating its ability to maintain high control performance despite changes in the grasping state.
Plain English Explanation
When a robot is using a tool, the way the tool is being held (the "grasping state") can change during the task. This can make it challenging for the robot to maintain precise control of the tool's tip. The researchers behind this paper have developed a new approach to help robots adapt to these types of changes.
At the heart of their method is a neural network called the "Tool-Body Network with Parametric Bias." This network allows the robot to learn how the tool's grasping state affects its behavior, and then adjust its control strategy accordingly. So if the way the tool is being held changes during a task, the robot can update its control to maintain accurate tool-tip positioning.
The researchers tested their approach through computer simulations and real-world experiments, and found that it was effective at helping the robot adapt to changes in the tool's grasping state. This could be useful for a variety of robotic applications where tools are used, such as link to "Adaptive Whole-Body Robotic Tool Use Learning", link to "Learning Cross-Hand Policies for High-DoF Reaching", or link to "Learning Extrinsic Dexterity via Parameterized Manipulation Primitives".
Technical Explanation
The key component of the proposed approach is the "Tool-Body Network with Parametric Bias" link to "Adaptive Manipulation using Behavior Trees". This network takes in information about the robot's state, the tool's state, and the current grasping state, and uses this to generate control commands for the robot's end-effector.
The parametric bias in the network allows it to adapt its behavior based on changes in the grasping state. Essentially, the network learns a mapping between the grasping state and the appropriate control strategy. So if the way the tool is being held changes, the network can update its parameters to shift its control outputs accordingly.
The researchers evaluated their approach through both simulation experiments and real-world trials using a Franka Emika Panda robot. They simulated various scenarios where the grasping state changed over time, and found that the Tool-Body Network was able to maintain high control performance. In the real-world experiments, they also observed the network's ability to adapt to changes in the tool's grasping state during task execution.
Critical Analysis
The paper presents a compelling approach for enabling robots to adapt to changes in tool grasping state during task execution. The use of the parametric bias in the neural network architecture is an interesting and potentially powerful mechanism for facilitating this adaptation.
However, the paper does not address some potential limitations or areas for further research. For example, it is unclear how the network would perform in situations with more dramatic or unpredictable changes in grasping state, or how it might scale to more complex tool-using tasks. Additionally, the paper does not explore the sample efficiency of the learning process, which could be an important practical consideration.
It would also be valuable to see the approach evaluated in a wider range of robotic applications, beyond the specific pick-and-place task used in the experiments. Applying the technique to more diverse tool-using scenarios, such as link to "Learning Extrinsic Dexterity via Parameterized Manipulation Primitives" or link to "Adaptive Manipulation using Behavior Trees", could help validate its broader applicability.
Conclusion
The "Adaptive Robotic Tool-Tip Control Learning Considering Online Changes in Grasping State" paper presents an innovative approach for enabling robots to maintain precise tool-tip control in the face of changing grasping conditions. By leveraging a neural network architecture with a parametric bias, the method allows the robot to adapt its control strategy to accommodate shifts in the tool's grasping state during task execution.
The simulation and real-world experimental results demonstrate the effectiveness of this approach, suggesting it could be a valuable tool for a variety of robotic applications involving tool use. Further research to address potential limitations and expand the technique to more complex scenarios could help unlock even greater capabilities for adaptive, dexterous robotic manipulation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Adaptive Robotic Tool-Tip Control Learning Considering Online Changes in Grasping State
Kento Kawaharazuka, Kei Okada, Masayuki Inaba
Various robotic tool manipulation methods have been developed so far. However, to our knowledge, none of them have taken into account the fact that the grasping state such as grasping position and tool angle can change at any time during the tool manipulation. In addition, there are few studies that can handle deformable tools. In this study, we develop a method for estimating the position of a tool-tip, controlling the tool-tip, and handling online adaptation to changes in the relationship between the body and the tool, using a neural network including parametric bias. We demonstrate the effectiveness of our method for online change in grasping state and for deformable tools, in experiments using two different types of robots: axis-driven robot PR2 and tendon-driven robot MusashiLarm.
Read more7/12/2024

0
Adaptive Whole-body Robotic Tool-use Learning on Low-rigidity Plastic-made Humanoids Using Vision and Tactile Sensors
Kento Kawaharazuka, Kei Okada, Masayuki Inaba
Various robots have been developed so far; however, we face challenges in modeling the low-rigidity bodies of some robots. In particular, the deflection of the body changes during tool-use due to object grasping, resulting in significant shifts in the tool-tip position and the body's center of gravity. Moreover, this deflection varies depending on the weight and length of the tool, making these models exceptionally complex. However, there is currently no control or learning method that takes all of these effects into account. In this study, we propose a method for constructing a neural network that describes the mutual relationship among joint angle, visual information, and tactile information from the feet. We aim to train this network using the actual robot data and utilize it for tool-tip control. Additionally, we employ Parametric Bias to capture changes in this mutual relationship caused by variations in the weight and length of tools, enabling us to understand the characteristics of the grasped tool from the current sensor information. We apply this approach to the whole-body tool-use on KXR, a low-rigidity plastic-made humanoid robot, to validate its effectiveness.
Read more5/9/2024

0
Tool Shape Optimization through Backpropagation of Neural Network
Kento Kawaharazuka, Toru Ogawa, Cota Nabeshima
When executing a certain task, human beings can choose or make an appropriate tool to achieve the task. This research especially addresses the optimization of tool shape for robotic tool-use. We propose a method in which a robot obtains an optimized tool shape, tool trajectory, or both, depending on a given task. The feature of our method is that a transition of the task state when the robot moves a certain tool along a certain trajectory is represented by a deep neural network. We applied this method to object manipulation tasks on a 2D plane, and verified that appropriate tool shapes are generated by using this novel method.
Read more7/18/2024
0
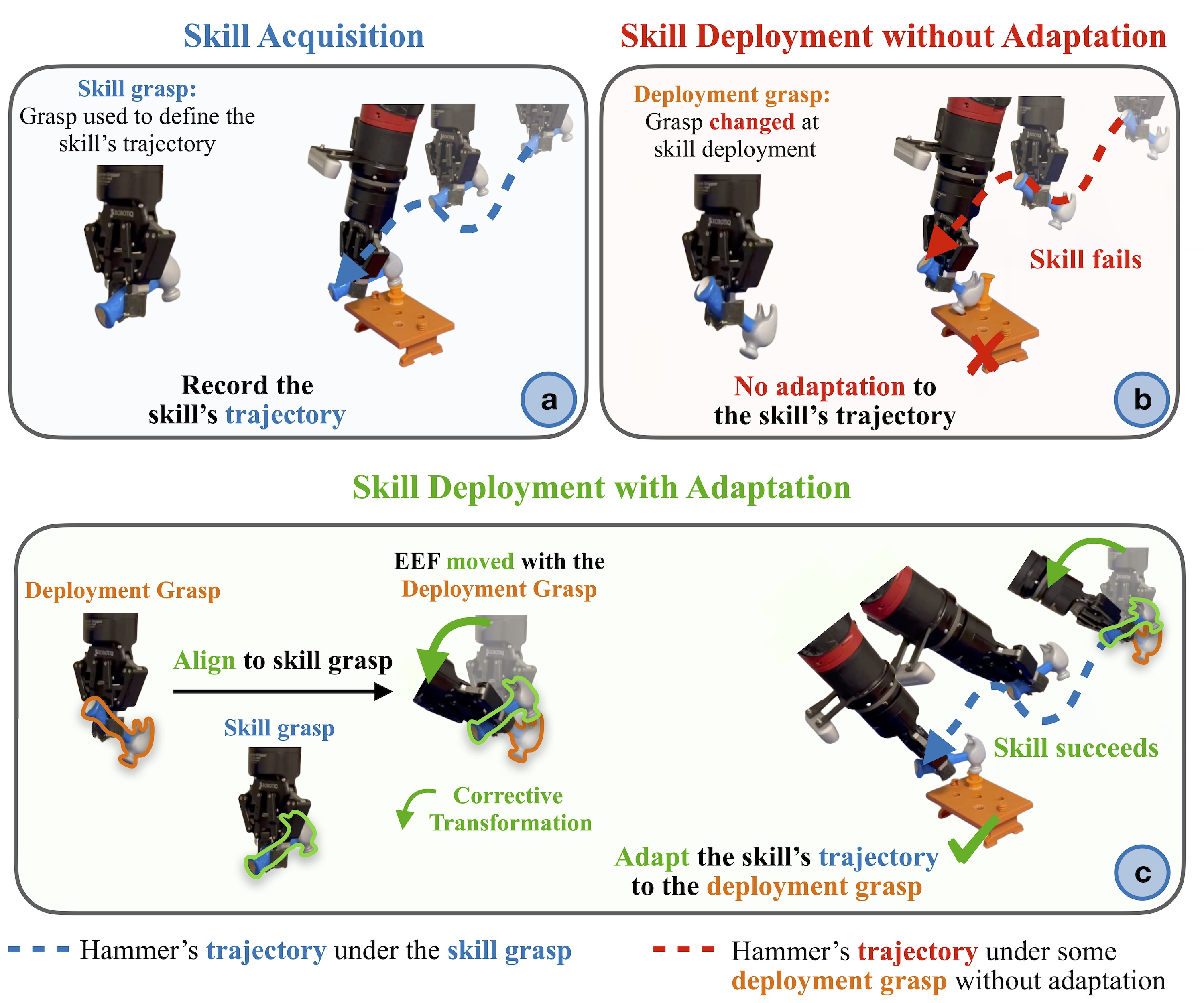
Adapting Skills to Novel Grasps: A Self-Supervised Approach
Georgios Papagiannis, Kamil Dreczkowski, Vitalis Vosylius, Edward Johns
In this paper, we study the problem of adapting manipulation trajectories involving grasped objects (e.g. tools) defined for a single grasp pose to novel grasp poses. A common approach to address this is to define a new trajectory for each possible grasp explicitly, but this is highly inefficient. Instead, we propose a method to adapt such trajectories directly while only requiring a period of self-supervised data collection, during which a camera observes the robot's end-effector moving with the object rigidly grasped. Importantly, our method requires no prior knowledge of the grasped object (such as a 3D CAD model), it can work with RGB images, depth images, or both, and it requires no camera calibration. Through a series of real-world experiments involving 1360 evaluations, we find that self-supervised RGB data consistently outperforms alternatives that rely on depth images including several state-of-the-art pose estimation methods. Compared to the best-performing baseline, our method results in an average of 28.5% higher success rate when adapting manipulation trajectories to novel grasps on several everyday tasks. Videos of the experiments are available on our webpage at https://www.robot-learning.uk/adapting-skills
Read more8/2/2024