Adaptive Terminal Sliding Mode Control Using Deep Reinforcement Learning for Zero-Force Control of Exoskeleton Robot Systems

0
🤿
Sign in to get full access
Overview
- This paper introduces a new control method for upper-limb exoskeleton robots.
- The proposed control method combines an Adaptive Integral Terminal Sliding Mode (AITSM) controller with Proximal Policy Optimization (PPO), a type of Deep Reinforcement Learning (DRL).
- The goal is to enable the exoskeleton to operate with zero force, even in the presence of system uncertainties.
Plain English Explanation
The paper presents a new way to control upper-limb exoskeleton robots, which are used in various applications like rehabilitation, assistance, and enhancing human physical capabilities. The proposed control method blends two key components:
-
Adaptive Integral Terminal Sliding Mode (AITSM) Controller: This controller is designed to quickly and accurately guide the exoskeleton to the desired state, even when faced with uncertainties in the system. It uses an integral terminal sliding surface to ensure the system converges to the target state in a finite amount of time, which is crucial for applications that require fast responses. The controller also includes an exponential switching term to reduce unwanted vibrations and improve overall accuracy.
-
Proximal Policy Optimization (PPO) with Attention and LSTM: PPO is a type of deep reinforcement learning that allows the controller to adapt in real-time based on feedback from the system. The PPO system incorporates an attention mechanism and Long Short-Term Memory (LSTM) neural networks, enabling the controller to focus on the most relevant system states, adapt to changing behavior, and capture long-term dependencies. This adaptability makes the controller robust and able to handle uncertainties and disturbances that could affect the exoskeleton's performance.
By combining these two components, the researchers have developed a control method that can operate an upper-limb exoskeleton with zero force, even in the face of system uncertainties. This is an important capability for various applications, as it allows the exoskeleton to assist the user without applying unwanted forces.
Technical Explanation
The paper proposes a novel zero-force control method for upper-limb exoskeleton robots, which is achieved by integrating an Adaptive Integral Terminal Sliding Mode (AITSM) controller with a Proximal Policy Optimization (PPO) system, a type of Deep Reinforcement Learning (DRL).
The AITSM controller is designed to quickly and accurately guide the 5-DOF upper-limb exoskeleton to the desired state, even in the presence of system uncertainties. It uses an integral terminal sliding surface to ensure finite-time convergence, which is crucial for applications requiring fast responses. The controller also includes an exponential switching control term to reduce chattering and improve system accuracy.
The PPO system incorporates an attention mechanism and Long Short-Term Memory (LSTM) neural networks, enabling the controller to selectively focus on relevant system states, adapt to changing behavior, and capture long-term dependencies. This adaptability, facilitated by the PPO system, allows for real-time parameter adjustments based on system feedback, making the controller robust and capable of dealing with uncertainties and disturbances that could affect the exoskeleton's performance.
The effectiveness and superiority of the proposed control method are confirmed through numerical simulations and comparisons with existing control methods.
Critical Analysis
The paper presents a comprehensive and well-designed approach to controlling upper-limb exoskeleton robots with zero force, even in the presence of system uncertainties. The combination of the AITSM controller and the PPO-based adaptive system is a novel and promising solution.
One potential limitation mentioned in the paper is the need for further experimental validation on a physical exoskeleton system. While the numerical simulations demonstrate the effectiveness of the proposed method, real-world testing would be necessary to fully assess its performance and robustness.
Additionally, the paper does not address the computational complexity and resource requirements of the PPO-based adaptive system, which could be a concern for real-time implementation, especially on embedded systems. Further research may be needed to optimize the algorithm and ensure efficient deployment.
Another area for potential exploration is the generalization of the control method to other types of exoskeletons or robotic systems. The authors could investigate the applicability of the proposed approach to different degrees of freedom, limb configurations, or even full-body exoskeletons.
Conclusion
This paper presents a novel zero-force control method for upper-limb exoskeleton robots that combines an Adaptive Integral Terminal Sliding Mode (AITSM) controller with a Proximal Policy Optimization (PPO) system. The AITSM controller ensures fast and accurate control, while the PPO-based adaptive system enhances the controller's robustness and ability to handle uncertainties and disturbances.
The proposed control method has the potential to significantly improve the performance and usability of upper-limb exoskeleton robots, enabling them to provide assistance without applying unwanted forces. This advancement could have important implications for rehabilitation, assistive technology, and human physical capability enhancement applications.
Further research and real-world validation would be valuable to fully assess the practical viability and scalability of this control approach, as well as explore potential extensions to a broader range of robotic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤿
0
Adaptive Terminal Sliding Mode Control Using Deep Reinforcement Learning for Zero-Force Control of Exoskeleton Robot Systems
Morteza Mirzaee, Reza Kazemi
This paper introduces a novel zero-force control method for upper-limb exoskeleton robots, which are used in a variety of applications including rehabilitation, assistance, and human physical capability enhancement. The proposed control method employs an Adaptive Integral Terminal Sliding Mode (AITSM) controller, combined with an exponential reaching law and Proximal Policy Optimization (PPO), a type of Deep Reinforcement Learning (DRL). The PPO system incorporates an attention mechanism and Long Short-Term Memory (LSTM) neural networks, enabling the controller to selectively focus on relevant system states, adapt to changing behavior, and capture long-term dependencies. This controller is designed to manage a 5-DOF upper-limb exoskeleton robot with zero force, even amidst system uncertainties. The controller uses an integral terminal sliding surface to ensure finite-time convergence to the desired state, a crucial feature for applications requiring quick responses. It also includes an exponential switching control term to reduce chattering and improve system accuracy. The controller's adaptability, facilitated by the PPO system, allows real-time parameter adjustments based on system feedback, making the controller robust and capable of dealing with uncertainties and disturbances that could affect the performance of the exoskeleton. The proposed control method's effectiveness and superiority are confirmed through numerical simulations and comparisons with existing control methods.
Read more7/29/2024
↗️
0
Integrating DeepRL with Robust Low-Level Control in Robotic Manipulators for Non-Repetitive Reaching Tasks
Mehdi Heydari Shahna, Seyed Adel Alizadeh Kolagar, Jouni Mattila
In robotics, contemporary strategies are learning-based, characterized by a complex black-box nature and a lack of interpretability, which may pose challenges in ensuring stability and safety. To address these issues, we propose integrating a collision-free trajectory planner based on deep reinforcement learning (DRL) with a novel auto-tuning low-level control strategy, all while actively engaging in the learning phase through interactions with the environment. This approach circumvents the control performance and complexities associated with computations while addressing nonrepetitive reaching tasks in the presence of obstacles. First, a model-free DRL agent is employed to plan velocity-bounded motion for a manipulator with 'n' degrees of freedom (DoF), ensuring collision avoidance for the end-effector through joint-level reasoning. The generated reference motion is then input into a robust subsystem-based adaptive controller, which produces the necessary torques, while the cuckoo search optimization (CSO) algorithm enhances control gains to minimize the stabilization and tracking error in the steady state. This approach guarantees robustness and uniform exponential convergence in an unfamiliar environment, despite the presence of uncertainties and disturbances. Theoretical assertions are validated through the presentation of simulation outcomes.
Read more5/16/2024
🔄
0
Adaptive-Sliding Mode Trajectory Control of Robot Manipulators with Uncertainties
Mustafa M. Mustafa, Carl D. Crane, Ibrahim Hamarash
In this paper, we propose and demonstrate an adaptive-sliding mode control for trajectory tracking control of robot manipulators subjected to uncertain dynamics, vibration disturbance, and payload variation disturbance. Throughout this work we seek a controller that is, robust to the uncertainty and disturbance, accurate, and implementable. To perform these requirements, we use a nonlinear Lyapunov-based approach for designing the controller and guaranteeing its stability. MATLAB-SIMULINK software is used to validate the approach and demonstrate the performance of the controller. Simulation results show that the derived controller is stable, robust to the disturbance and uncertainties, accurate, and implementable.
Read more8/7/2024
0
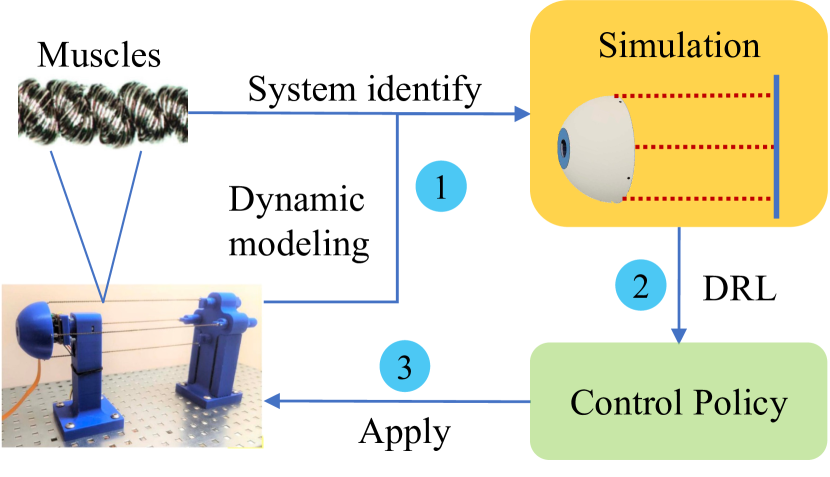
An Efficient Learning Control Framework With Sim-to-Real for String-Type Artificial Muscle-Driven Robotic Systems
Jiyue Tao, Yunsong Zhang, Sunil Kumar Rajendran, Feitian Zhang, Dexin Zhao, Tongsheng Shen
Robotic systems driven by artificial muscles present unique challenges due to the nonlinear dynamics of actuators and the complex designs of mechanical structures. Traditional model-based controllers often struggle to achieve desired control performance in such systems. Deep reinforcement learning (DRL), a trending machine learning technique widely adopted in robot control, offers a promising alternative. However, integrating DRL into these robotic systems faces significant challenges, including the requirement for large amounts of training data and the inevitable sim-to-real gap when deployed to real-world robots. This paper proposes an efficient reinforcement learning control framework with sim-to-real transfer to address these challenges. Bootstrap and augmentation enhancements are designed to improve the data efficiency of baseline DRL algorithms, while a sim-to-real transfer technique, namely randomization of muscle dynamics, is adopted to bridge the gap between simulation and real-world deployment. Extensive experiments and ablation studies are conducted utilizing two string-type artificial muscle-driven robotic systems including a two degree-of-freedom robotic eye and a parallel robotic wrist, the results of which demonstrate the effectiveness of the proposed learning control strategy.
Read more6/10/2024