An Efficient Learning Control Framework With Sim-to-Real for String-Type Artificial Muscle-Driven Robotic Systems
2405.10576
0
0
Abstract
Robotic systems driven by artificial muscles present unique challenges due to the nonlinear dynamics of actuators and the complex designs of mechanical structures. Traditional model-based controllers often struggle to achieve desired control performance in such systems. Deep reinforcement learning (DRL), a trending machine learning technique widely adopted in robot control, offers a promising alternative. However, integrating DRL into these robotic systems faces significant challenges, including the requirement for large amounts of training data and the inevitable sim-to-real gap when deployed to real-world robots. This paper proposes an efficient reinforcement learning control framework with sim-to-real transfer to address these challenges. Bootstrap and augmentation enhancements are designed to improve the data efficiency of baseline DRL algorithms, while a sim-to-real transfer technique, namely randomization of muscle dynamics, is adopted to bridge the gap between simulation and real-world deployment. Extensive experiments and ablation studies are conducted utilizing two string-type artificial muscle-driven robotic systems including a two degree-of-freedom robotic eye and a parallel robotic wrist, the results of which demonstrate the effectiveness of the proposed learning control strategy.
Create account to get full access
Overview
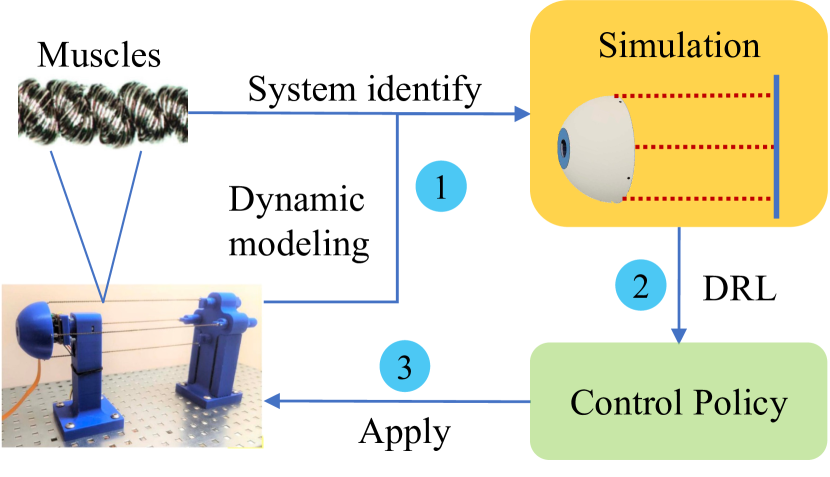
- This paper presents an efficient learning control framework with sim-to-real transfer for string-type artificial muscle-driven robotic systems.
- The framework combines deep reinforcement learning (DRL) for high-level control with a robust low-level controller to enable effective sim-to-real transfer.
- Experiments on a real-world robotic manipulator demonstrate the framework's ability to learn complex control policies and successfully transfer them from simulation to the physical system.
Plain English Explanation
The paper describes a new approach for controlling robotic systems that use artificial muscles instead of traditional motors. Artificial muscles are flexible materials that can contract and expand like real muscle, which allows for more natural and compliant movements. However, these systems can be challenging to control precisely.
The researchers developed a two-part control framework to address this challenge. The high-level control is handled by a deep reinforcement learning (DRL) algorithm, which learns an optimal control policy by trial and error in simulation. This DRL policy defines the overall motion the robot should make. The low-level control is handled by a separate robust controller that ensures the physical robot can accurately execute the high-level commands, even when there are small differences between the simulation and the real world.
By combining these two components, the researchers were able to develop a control system that could effectively transfer the control policies learned in simulation to a real-world robotic manipulator with artificial muscles. This "sim-to-real" approach allows the robot to learn complex control skills in simulation, where it is safe and efficient to experiment, and then apply those skills in the real world.
Technical Explanation
The core of the proposed framework is a hierarchical control architecture that separates high-level decision-making from low-level control execution. The authors build upon prior work on integrating deep reinforcement learning and robust low-level control for robotic systems.
At the high level, a deep reinforcement learning (DRL) agent learns an optimal control policy in simulation. The DRL policy maps the current state of the robotic system to the desired high-level actions, such as the target joint positions or end-effector pose. This DRL-based high-level control is similar to the approach used in the adaptive reinforcement learning for robot control paper.
The low-level control is handled by a robust controller that can accurately track the high-level commands despite discrepancies between the simulation and the real world. This controller uses a model-based approach to compensate for uncertainties and disturbances, enabling effective sim-to-real transfer. The use of a robust low-level controller is analogous to the approach described in the sim-to-real transfer for active suspension control paper.
The key innovation in this work is the integration of the DRL-based high-level control with the robust low-level controller, which allows the framework to learn complex control policies in simulation and deploy them successfully on the physical robotic system. This platform-agnostic approach is similar to the deep reinforcement learning framework described in the related work.
Critical Analysis
The authors acknowledge several limitations of their approach. First, the sim-to-real transfer may not be perfect, and there may still be some differences between the simulated and real-world dynamics that the low-level controller cannot fully compensate for. Additionally, the framework relies on the availability of an accurate simulation model, which can be challenging to develop for complex robotic systems.
Another potential concern is the computational complexity of the hierarchical control architecture, which may limit its deployment on resource-constrained robotic platforms. The authors do not provide a detailed analysis of the runtime performance or memory requirements of their framework.
Further research could explore ways to improve the robustness of the sim-to-real transfer, such as by incorporating domain randomization techniques or leveraging meta-learning approaches to learn more robust control policies. Investigating skill transfer and discovery methods, as discussed in the related work, could also help expand the capabilities of the framework.
Conclusion
This paper presents a promising approach for enabling effective control of string-type artificial muscle-driven robotic systems. By combining deep reinforcement learning for high-level control with a robust low-level controller, the framework can learn complex control policies in simulation and successfully transfer them to the physical system. The demonstrated ability to bridge the sim-to-real gap has significant implications for the development of more natural and compliant robotic systems that can operate safely and reliably in the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

DrEureka: Language Model Guided Sim-To-Real Transfer
Yecheng Jason Ma, William Liang, Hung-Ju Wang, Sam Wang, Yuke Zhu, Linxi Fan, Osbert Bastani, Dinesh Jayaraman
0
0
Transferring policies learned in simulation to the real world is a promising strategy for acquiring robot skills at scale. However, sim-to-real approaches typically rely on manual design and tuning of the task reward function as well as the simulation physics parameters, rendering the process slow and human-labor intensive. In this paper, we investigate using Large Language Models (LLMs) to automate and accelerate sim-to-real design. Our LLM-guided sim-to-real approach, DrEureka, requires only the physics simulation for the target task and automatically constructs suitable reward functions and domain randomization distributions to support real-world transfer. We first demonstrate that our approach can discover sim-to-real configurations that are competitive with existing human-designed ones on quadruped locomotion and dexterous manipulation tasks. Then, we showcase that our approach is capable of solving novel robot tasks, such as quadruped balancing and walking atop a yoga ball, without iterative manual design.
6/5/2024
Adaptive Reinforcement Learning for Robot Control
Yu Tang Liu, Nilaksh Singh, Aamir Ahmad
0
0
Deep reinforcement learning (DRL) has shown remarkable success in simulation domains, yet its application in designing robot controllers remains limited, due to its single-task orientation and insufficient adaptability to environmental changes. To overcome these limitations, we present a novel adaptive agent that leverages transfer learning techniques to dynamically adapt policy in response to different tasks and environmental conditions. The approach is validated through the blimp control challenge, where multitasking capabilities and environmental adaptability are essential. The agent is trained using a custom, highly parallelized simulator built on IsaacGym. We perform zero-shot transfer to fly the blimp in the real world to solve various tasks. We share our code at url{https://github.com/robot-perception-group/adaptive_agent/}.
4/30/2024
↗️
Integrating DeepRL with Robust Low-Level Control in Robotic Manipulators for Non-Repetitive Reaching Tasks
Mehdi Heydari Shahna, Seyed Adel Alizadeh Kolagar, Jouni Mattila
0
0
In robotics, contemporary strategies are learning-based, characterized by a complex black-box nature and a lack of interpretability, which may pose challenges in ensuring stability and safety. To address these issues, we propose integrating a collision-free trajectory planner based on deep reinforcement learning (DRL) with a novel auto-tuning low-level control strategy, all while actively engaging in the learning phase through interactions with the environment. This approach circumvents the control performance and complexities associated with computations while addressing nonrepetitive reaching tasks in the presence of obstacles. First, a model-free DRL agent is employed to plan velocity-bounded motion for a manipulator with 'n' degrees of freedom (DoF), ensuring collision avoidance for the end-effector through joint-level reasoning. The generated reference motion is then input into a robust subsystem-based adaptive controller, which produces the necessary torques, while the cuckoo search optimization (CSO) algorithm enhances control gains to minimize the stabilization and tracking error in the steady state. This approach guarantees robustness and uniform exponential convergence in an unfamiliar environment, despite the presence of uncertainties and disturbances. Theoretical assertions are validated through the presentation of simulation outcomes.
5/16/2024
🤿
A Platform-Agnostic Deep Reinforcement Learning Framework for Effective Sim2Real Transfer in Autonomous Driving
Dianzhao Li, Ostap Okhrin
0
0
Deep Reinforcement Learning (DRL) has shown remarkable success in solving complex tasks across various research fields. However, transferring DRL agents to the real world is still challenging due to the significant discrepancies between simulation and reality. To address this issue, we propose a robust DRL framework that leverages platform-dependent perception modules to extract task-relevant information and train a lane-following and overtaking agent in simulation. This framework facilitates the seamless transfer of the DRL agent to new simulated environments and the real world with minimal effort. We evaluate the performance of the agent in various driving scenarios in both simulation and the real world, and compare it to human players and the PID baseline in simulation. Our proposed framework significantly reduces the gaps between different platforms and the Sim2Real gap, enabling the trained agent to achieve similar performance in both simulation and the real world, driving the vehicle effectively.
5/1/2024