Integrating DeepRL with Robust Low-Level Control in Robotic Manipulators for Non-Repetitive Reaching Tasks
2402.02551
0
0
↗️
Abstract
In robotics, contemporary strategies are learning-based, characterized by a complex black-box nature and a lack of interpretability, which may pose challenges in ensuring stability and safety. To address these issues, we propose integrating a collision-free trajectory planner based on deep reinforcement learning (DRL) with a novel auto-tuning low-level control strategy, all while actively engaging in the learning phase through interactions with the environment. This approach circumvents the control performance and complexities associated with computations while addressing nonrepetitive reaching tasks in the presence of obstacles. First, a model-free DRL agent is employed to plan velocity-bounded motion for a manipulator with 'n' degrees of freedom (DoF), ensuring collision avoidance for the end-effector through joint-level reasoning. The generated reference motion is then input into a robust subsystem-based adaptive controller, which produces the necessary torques, while the cuckoo search optimization (CSO) algorithm enhances control gains to minimize the stabilization and tracking error in the steady state. This approach guarantees robustness and uniform exponential convergence in an unfamiliar environment, despite the presence of uncertainties and disturbances. Theoretical assertions are validated through the presentation of simulation outcomes.
Create account to get full access
Overview
- This paper proposes a new approach to robot control that integrates a collision-free trajectory planner based on deep reinforcement learning (DRL) with a novel auto-tuning low-level control strategy.
- The goal is to address the challenges posed by the complex, black-box nature and lack of interpretability of contemporary learning-based strategies in robotics, which can make it difficult to ensure stability and safety.
- The key elements of the proposed approach include:
- Using a model-free DRL agent to plan velocity-bounded motion for a manipulator, ensuring collision avoidance through joint-level reasoning.
- Inputting the generated reference motion into a robust subsystem-based adaptive controller, which produces the necessary torques.
- Employing the cuckoo search optimization (CSO) algorithm to enhance the control gains and minimize stabilization and tracking error.
Plain English Explanation
The paper deals with the challenge of controlling robots in a safe and reliable way, especially when they are performing complex tasks in unfamiliar environments with obstacles. Traditional robot control strategies often rely on machine learning models that are like black boxes, meaning they are difficult to understand and interpret. This can make it hard to guarantee that the robot will behave in a stable and safe manner.
To address this issue, the researchers propose a new approach that combines two key elements:
-
Collision-free trajectory planning: They use a deep reinforcement learning (DRL) model to plan the robot's movements, ensuring that the end-effector (the part of the robot that interacts with the environment) avoids collisions with obstacles. The DRL model learns how to navigate the environment by trial and error, without relying on a pre-defined model of the world.
-
Adaptive low-level control: The planned trajectory is then fed into a control system that adjusts the robot's torque (the force that makes it move) in real-time. This control system uses an optimization algorithm called cuckoo search to automatically tune its parameters, helping the robot to accurately follow the planned trajectory and maintain stability, even in the presence of uncertainties or disturbances.
By combining these two elements, the researchers aim to create a robot control system that is both effective (able to handle complex tasks) and reliable (able to operate safely in unfamiliar environments). The theoretical assertions made in the paper are supported by simulation results.
Technical Explanation
The paper presents a novel approach to robot control that integrates a collision-free trajectory planner based on deep reinforcement learning (DRL) with a robust, auto-tuning low-level control strategy.
The DRL-based trajectory planner is used to generate velocity-bounded motion for a manipulator with 'n' degrees of freedom (DoF), ensuring collision avoidance for the end-effector through joint-level reasoning. This model-free DRL agent learns to navigate the environment and plan safe trajectories by interacting with the environment and receiving reward signals, without relying on a pre-defined model of the world.
The reference motion generated by the DRL planner is then input into a subsystem-based adaptive controller, which produces the necessary torques to actuate the robot. The cuckoo search optimization (CSO) algorithm is employed to enhance the control gains, helping to minimize the stabilization and tracking error in the steady state. This approach ensures robustness and uniform exponential convergence, even in the presence of uncertainties and disturbances.
The theoretical assertions made in the paper are validated through the presentation of simulation outcomes, demonstrating the effectiveness of the proposed approach in handling non-repetitive reaching tasks in the presence of obstacles.
Critical Analysis
The paper presents a novel and promising approach to robot control that addresses some of the key challenges associated with contemporary learning-based strategies, such as their complex black-box nature and lack of interpretability.
One potential limitation of the research is that it has only been validated through simulation experiments, and it remains to be seen how the proposed approach would perform in real-world scenarios with all the inherent complexities and uncertainties. It would be valuable to see the system tested on physical robot platforms to further assess its practical viability and robustness.
Additionally, while the paper discusses the advantages of the DRL-based trajectory planner in terms of its ability to learn collision-free motions, it does not provide much detail on the specific DRL architecture or training process used. A more thorough discussion of these technical aspects would be helpful for researchers interested in replicating or building upon this work.
Finally, the paper could benefit from a more in-depth analysis of the potential limitations and drawbacks of the proposed approach. For example, it would be useful to understand the computational complexity of the CSO algorithm and how it might scale with the size and complexity of the robot system.
Overall, this research represents an interesting and important step towards developing more reliable and interpretable robot control strategies, and the authors have demonstrated a novel and promising solution. However, there are still some areas that could be explored in more depth to fully assess the strengths and weaknesses of the approach.
Conclusion
This paper presents a novel approach to robot control that combines a collision-free trajectory planner based on deep reinforcement learning (DRL) with a robust, auto-tuning low-level control strategy. The goal is to address the challenges posed by the complex, black-box nature and lack of interpretability of contemporary learning-based strategies in robotics, which can make it difficult to ensure stability and safety.
The key elements of the proposed approach include using a model-free DRL agent to plan velocity-bounded motion for a manipulator, ensuring collision avoidance through joint-level reasoning, and then inputting the generated reference motion into a subsystem-based adaptive controller that employs the cuckoo search optimization (CSO) algorithm to enhance the control gains and minimize stabilization and tracking error.
The theoretical assertions made in the paper are validated through simulation experiments, demonstrating the effectiveness of the proposed approach in handling non-repetitive reaching tasks in the presence of obstacles. While the research represents an important step forward, further investigation is needed to assess the practical viability and scalability of the approach, particularly through real-world testing on physical robot platforms.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Adaptive Reinforcement Learning for Robot Control
Yu Tang Liu, Nilaksh Singh, Aamir Ahmad
0
0
Deep reinforcement learning (DRL) has shown remarkable success in simulation domains, yet its application in designing robot controllers remains limited, due to its single-task orientation and insufficient adaptability to environmental changes. To overcome these limitations, we present a novel adaptive agent that leverages transfer learning techniques to dynamically adapt policy in response to different tasks and environmental conditions. The approach is validated through the blimp control challenge, where multitasking capabilities and environmental adaptability are essential. The agent is trained using a custom, highly parallelized simulator built on IsaacGym. We perform zero-shot transfer to fly the blimp in the real world to solve various tasks. We share our code at url{https://github.com/robot-perception-group/adaptive_agent/}.
4/30/2024
An Efficient Learning Control Framework With Sim-to-Real for String-Type Artificial Muscle-Driven Robotic Systems
Jiyue Tao, Yunsong Zhang, Sunil Kumar Rajendran, Feitian Zhang, Dexin Zhao, Tongsheng Shen
0
0
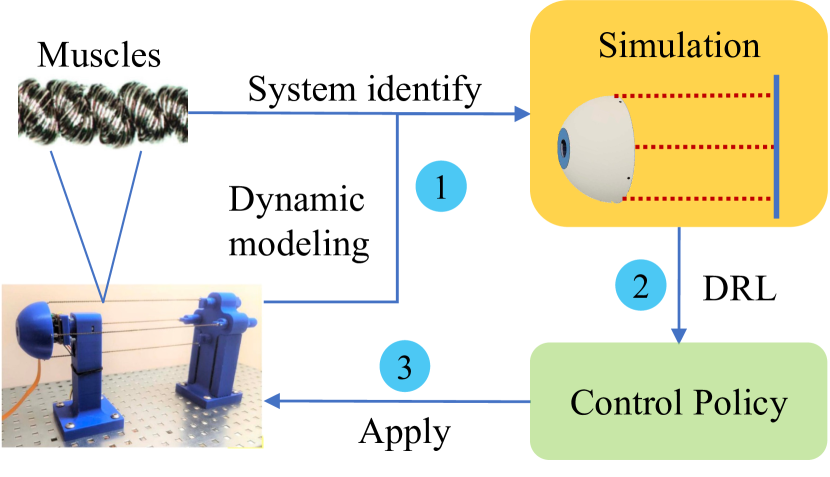
Robotic systems driven by artificial muscles present unique challenges due to the nonlinear dynamics of actuators and the complex designs of mechanical structures. Traditional model-based controllers often struggle to achieve desired control performance in such systems. Deep reinforcement learning (DRL), a trending machine learning technique widely adopted in robot control, offers a promising alternative. However, integrating DRL into these robotic systems faces significant challenges, including the requirement for large amounts of training data and the inevitable sim-to-real gap when deployed to real-world robots. This paper proposes an efficient reinforcement learning control framework with sim-to-real transfer to address these challenges. Bootstrap and augmentation enhancements are designed to improve the data efficiency of baseline DRL algorithms, while a sim-to-real transfer technique, namely randomization of muscle dynamics, is adopted to bridge the gap between simulation and real-world deployment. Extensive experiments and ablation studies are conducted utilizing two string-type artificial muscle-driven robotic systems including a two degree-of-freedom robotic eye and a parallel robotic wrist, the results of which demonstrate the effectiveness of the proposed learning control strategy.
6/10/2024

Deep Dive into Model-free Reinforcement Learning for Biological and Robotic Systems: Theory and Practice
Yusheng Jiao, Feng Ling, Sina Heydari, Nicolas Heess, Josh Merel, Eva Kanso
0
0
Animals and robots exist in a physical world and must coordinate their bodies to achieve behavioral objectives. With recent developments in deep reinforcement learning, it is now possible for scientists and engineers to obtain sensorimotor strategies (policies) for specific tasks using physically simulated bodies and environments. However, the utility of these methods goes beyond the constraints of a specific task; they offer an exciting framework for understanding the organization of an animal sensorimotor system in connection to its morphology and physical interaction with the environment, as well as for deriving general design rules for sensing and actuation in robotic systems. Algorithms and code implementing both learning agents and environments are increasingly available, but the basic assumptions and choices that go into the formulation of an embodied feedback control problem using deep reinforcement learning may not be immediately apparent. Here, we present a concise exposition of the mathematical and algorithmic aspects of model-free reinforcement learning, specifically through the use of textit{actor-critic} methods, as a tool for investigating the feedback control underlying animal and robotic behavior.
5/21/2024

Collision Avoidance and Navigation for a Quadrotor Swarm Using End-to-end Deep Reinforcement Learning
Zhehui Huang, Zhaojing Yang, Rahul Krupani, Bask{i}n c{S}enbac{s}lar, Sumeet Batra, Gaurav S. Sukhatme
0
0
End-to-end deep reinforcement learning (DRL) for quadrotor control promises many benefits -- easy deployment, task generalization and real-time execution capability. Prior end-to-end DRL-based methods have showcased the ability to deploy learned controllers onto single quadrotors or quadrotor teams maneuvering in simple, obstacle-free environments. However, the addition of obstacles increases the number of possible interactions exponentially, thereby increasing the difficulty of training RL policies. In this work, we propose an end-to-end DRL approach to control quadrotor swarms in environments with obstacles. We provide our agents a curriculum and a replay buffer of the clipped collision episodes to improve performance in obstacle-rich environments. We implement an attention mechanism to attend to the neighbor robots and obstacle interactions - the first successful demonstration of this mechanism on policies for swarm behavior deployed on severely compute-constrained hardware. Our work is the first work that demonstrates the possibility of learning neighbor-avoiding and obstacle-avoiding control policies trained with end-to-end DRL that transfers zero-shot to real quadrotors. Our approach scales to 32 robots with 80% obstacle density in simulation and 8 robots with 20% obstacle density in physical deployment. Video demonstrations are available on the project website at: https://sites.google.com/view/obst-avoid-swarm-rl.
5/7/2024