Adversarial and Reactive Traffic Agents for Realistic Driving Simulation

0

Sign in to get full access
Overview
- This paper presents a framework for generating realistic and adversarial traffic agents to improve driving simulation for autonomous vehicle testing.
- The researchers developed a categorization of driving scenarios based on driver behavior and environmental conditions.
- They then designed a deep reinforcement learning approach to train traffic agents that exhibit both reactive and adversarial behaviors.
- The resulting traffic agents were evaluated in simulated driving scenarios and shown to improve the realism and challenge of the testing environment.
Plain English Explanation
The researchers in this paper wanted to make driving simulations more realistic and challenging for testing autonomous vehicles (AVs). They recognized that current simulations often lack the complexity and unpredictability of real-world driving, which is essential for thoroughly validating AV systems.
To address this, the researchers first categorized different types of driving scenarios based on factors like driver behavior and environmental conditions. For example, some scenarios might involve aggressive or erratic drivers, while others could have poor weather or road conditions.
Next, the researchers developed a deep reinforcement learning approach to train virtual traffic agents that could exhibit both reactive and adversarial behaviors. Reactive behaviors are the typical responses you'd expect from a driver, like braking or changing lanes. Adversarial behaviors are more unpredictable and challenging, like suddenly cutting in front of the AV or making unexpected maneuvers.
By training these traffic agents, the researchers were able to create simulated driving environments that were much more realistic and difficult for the AV systems to navigate. When tested, the AV systems had to contend with a variety of traffic behaviors, helping to uncover potential weaknesses or blindspots in the AV's decision-making and control algorithms.
Overall, this research represents an important step towards developing more robust and comprehensive testing frameworks for autonomous vehicles, which could ultimately lead to safer and more reliable self-driving technology.
Technical Explanation
The researchers in this paper developed a framework for generating realistic and adversarial traffic agents to improve the realism and challenge of driving simulations for autonomous vehicle (AV) testing.
They first categorized driving scenarios based on two key factors: driver behavior and environmental conditions. This allowed them to systematically design traffic agents that could exhibit a range of behaviors, from typical reactive responses to more adversarial maneuvers.
To train these traffic agents, the researchers used a deep reinforcement learning approach. Their agent architecture combined a reactive policy network and an adversarial policy network, enabling the agents to switch between these two modes of behavior during simulation.
The training process involved a multi-stage curriculum, gradually increasing the complexity of the scenarios and the level of adversarial behavior required from the agents.
When evaluated in simulated driving scenarios, the results showed that the trained traffic agents were able to significantly improve the realism and challenge of the testing environment for the AV systems, compared to baseline traffic agents.
Critical Analysis
The paper presents a well-designed and thorough framework for generating realistic and adversarial traffic agents to enhance the testing of autonomous vehicles. The key strengths of the research include:
-
Comprehensive Scenario Categorization: The researchers' approach to categorizing driving scenarios based on driver behavior and environmental conditions provides a structured way to design traffic agents that can exhibit a wide range of behaviors, from typical to more challenging.
-
Adaptive Agent Architecture: The combination of reactive and adversarial policy networks in the traffic agent design allows for a flexible and adaptable behavior during simulation, making the agents more realistic and unpredictable.
-
Rigorous Training Approach: The multi-stage curriculum training process demonstrates a thoughtful and systematic way to develop the traffic agents' capabilities, gradually increasing the complexity and level of adversarial behavior.
However, the paper does not address some potential limitations and areas for further research:
-
Generalization to Real-World Scenarios: While the simulated results are promising, it's unclear how well the trained traffic agents would generalize to truly unpredictable and complex real-world driving scenarios, which may involve even more diverse and nuanced behaviors.
-
Validation with Human Drivers: The realism of the traffic agents could be further validated by comparing their behaviors to those of human drivers in real-world conditions, rather than relying solely on simulated evaluations.
-
Ethical Considerations: The use of adversarial traffic agents raises potential ethical concerns, as they could be designed to deliberately test the limits of AV systems in a way that could endanger human lives. Careful consideration of these issues is important.
Overall, this research represents an important advancement in the field of autonomous vehicle testing, but continued work is needed to address these areas of concern and further improve the realism and safety of driving simulations.
Conclusion
The paper presents a novel framework for generating realistic and adversarial traffic agents to enhance the testing of autonomous vehicles in simulated driving environments. By categorizing driving scenarios based on driver behavior and environmental conditions, the researchers were able to train traffic agents that could exhibit a range of reactive and adversarial behaviors.
The resulting traffic agents were shown to significantly improve the realism and challenge of the testing environment for AV systems, helping to uncover potential weaknesses or blindspots in their decision-making and control algorithms. This research represents an important step towards developing more robust and comprehensive testing frameworks for autonomous vehicles, which could ultimately lead to safer and more reliable self-driving technology.
While the paper demonstrates the potential of this approach, further work is needed to address the limitations and ethical considerations, as well as to validate the traffic agents' behaviors against real-world driving scenarios. Nonetheless, this research is a valuable contribution to the ongoing efforts to ensure the safe and reliable deployment of autonomous vehicles.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Adversarial and Reactive Traffic Agents for Realistic Driving Simulation
Joshua Ransiek, Philipp Reis, Eric Sax
Despite advancements in perception and planning for autonomous vehicles (AVs), validating their performance remains a significant challenge. The deployment of planning algorithms in real-world environments is often ineffective due to discrepancies between simulations and real traffic conditions. Evaluating AVs planning algorithms in simulation typically involves replaying driving logs from recorded real-world traffic. However, agents replayed from offline data are not reactive, lack the ability to respond to arbitrary AV behavior, and cannot behave in an adversarial manner to test certain properties of the driving policy. Therefore, simulation with realistic and potentially adversarial agents represents a critical task for AV planning software validation. In this work, we aim to review current research efforts in the field of adversarial and reactive traffic agents, with a particular focus on the application of classical and adversarial learning-based techniques. The objective of this work is to categorize existing approaches based on the proposed scenario controllability, defined by the number of reactive or adversarial agents. Moreover, we examine existing traffic simulations with respect to their employed default traffic agents and potential extensions, collate datasets that provide initial driving data, and collect relevant evaluation metrics.
Read more9/24/2024

0
Realistic Extreme Behavior Generation for Improved AV Testing
Robert Dyro, Matthew Foutter, Ruolin Li, Luigi Di Lillo, Edward Schmerling, Xilin Zhou, Marco Pavone
This work introduces a framework to diagnose the strengths and shortcomings of Autonomous Vehicle (AV) collision avoidance technology with synthetic yet realistic potential collision scenarios adapted from real-world, collision-free data. Our framework generates counterfactual collisions with diverse crash properties, e.g., crash angle and velocity, between an adversary and a target vehicle by adding perturbations to the adversary's predicted trajectory from a learned AV behavior model. Our main contribution is to ground these adversarial perturbations in realistic behavior as defined through the lens of data-alignment in the behavior model's parameter space. Then, we cluster these synthetic counterfactuals to identify plausible and representative collision scenarios to form the basis of a test suite for downstream AV system evaluation. We demonstrate our framework using two state-of-the-art behavior prediction models as sources of realistic adversarial perturbations, and show that our scenario clustering evokes interpretable failure modes from a baseline AV policy under evaluation.
Read more9/18/2024
0
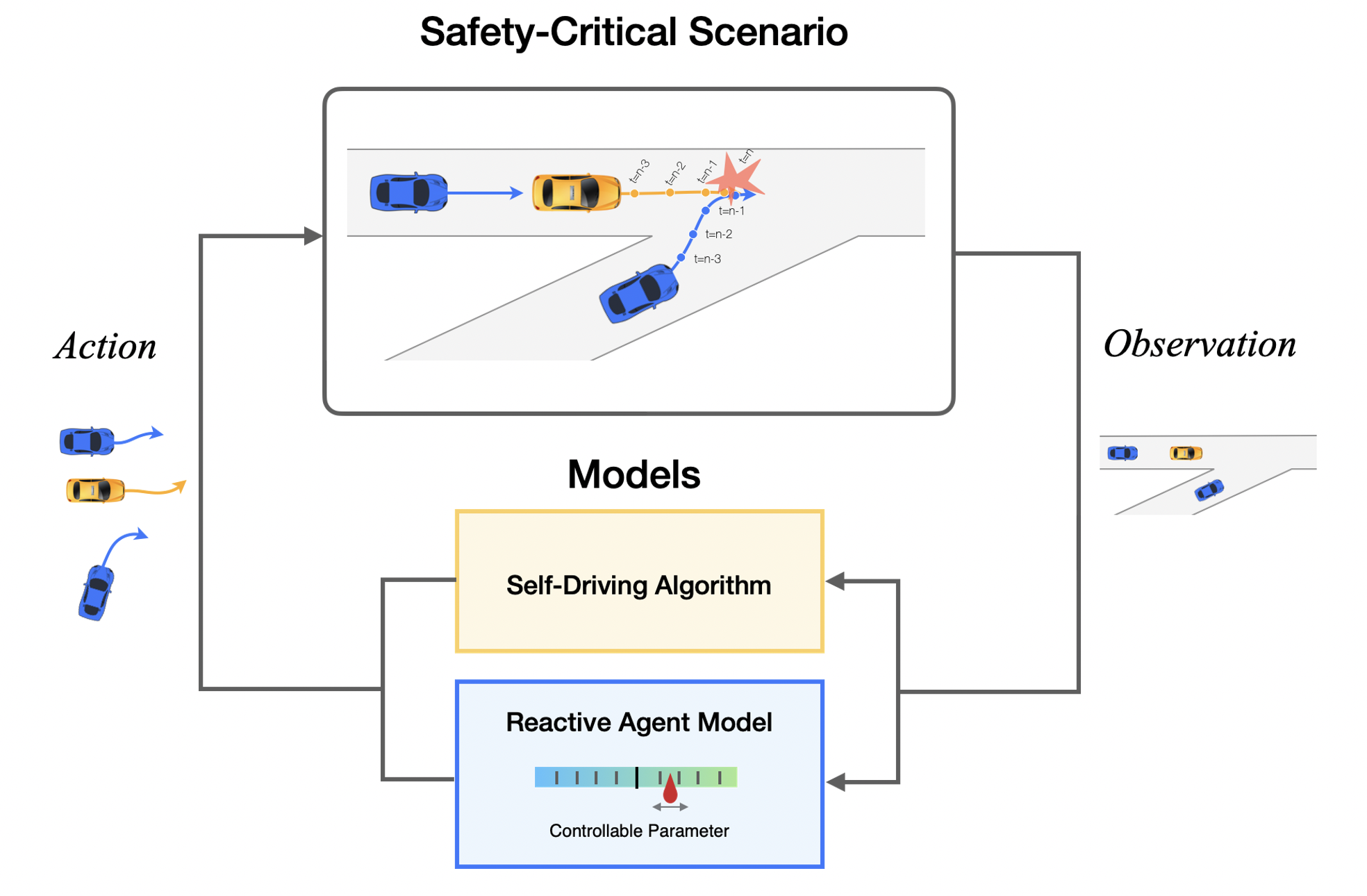
SAFE-SIM: Safety-Critical Closed-Loop Traffic Simulation with Controllable Adversaries
Wei-Jer Chang, Francesco Pittaluga, Masayoshi Tomizuka, Wei Zhan, Manmohan Chandraker
Evaluating the performance of autonomous vehicle planning algorithms necessitates simulating long-tail safety-critical traffic scenarios. However, traditional methods for generating such scenarios often fall short in terms of controllability and realism; they also neglect the dynamics of agent interactions. To address these limitations, we introduce SAFE-SIM, a novel diffusion-based controllable closed-loop safety-critical simulation framework. Our approach yields two distinct advantages: 1) generating realistic long-tail safety-critical scenarios that closely reflect real-world conditions, and 2) providing controllable adversarial behavior for more comprehensive and interactive evaluations. We develop a novel approach to simulate safety-critical scenarios through an adversarial term in the denoising process of diffusion models, which allows an adversarial agent to challenge a planner with plausible maneuvers while all agents in the scene exhibit reactive and realistic behaviors. Furthermore, we propose novel guidance objectives and a partial diffusion process that enables users to control key aspects of the scenarios, such as the collision type and aggressiveness of the adversarial agent, while maintaining the realism of the behavior. We validate our framework empirically using the nuScenes and nuPlan datasets across multiple planners, demonstrating improvements in both realism and controllability. These findings affirm that diffusion models provide a robust and versatile foundation for safety-critical, interactive traffic simulation, extending their utility across the broader autonomous driving landscape. Project website: https://safe-sim.github.io/.
Read more8/9/2024
🛸
0
Adversarial Safety-Critical Scenario Generation using Naturalistic Human Driving Priors
Kunkun Hao, Yonggang Luo, Wen Cui, Yuqiao Bai, Jucheng Yang, Songyang Yan, Yuxi Pan, Zijiang Yang
Evaluating the decision-making system is indispensable in developing autonomous vehicles, while realistic and challenging safety-critical test scenarios play a crucial role. Obtaining these scenarios is non-trivial, thanks to the long-tailed distribution, sparsity, and rarity in real-world data sets. To tackle this problem, in this paper, we introduce a natural adversarial scenario generation solution using naturalistic human driving priors and reinforcement learning techniques. By doing this, we can obtain large-scale test scenarios that are both diverse and realistic. Specifically, we build a simulation environment that mimics natural traffic interaction scenarios. Informed by this environment, we implement a two-stage procedure. The first stage incorporates conventional rule-based models, e.g., IDM~(Intelligent Driver Model) and MOBIL~(Minimizing Overall Braking Induced by Lane changes) model, to coarsely and discretely capture and calibrate key control parameters from the real-world dataset. Next, we leverage GAIL~(Generative Adversarial Imitation Learning) to represent driver behaviors continuously. The derived GAIL can be further used to design a PPO~(Proximal Policy Optimization)-based actor-critic network framework to fine-tune the reward function, and then optimizes our natural adversarial scenario generation solution. Extensive experiments have been conducted in the NGSIM dataset including the trajectory of 3,000 vehicles. Essential traffic parameters were measured in comparison with the baseline model, e.g., the collision rate, accelerations, steering, and the number of lane changes. Our findings demonstrate that the proposed model can generate realistic safety-critical test scenarios covering both naturalness and adversariality, which can be a cornerstone for the development of autonomous vehicles.
Read more8/9/2024